о ел
00 (л)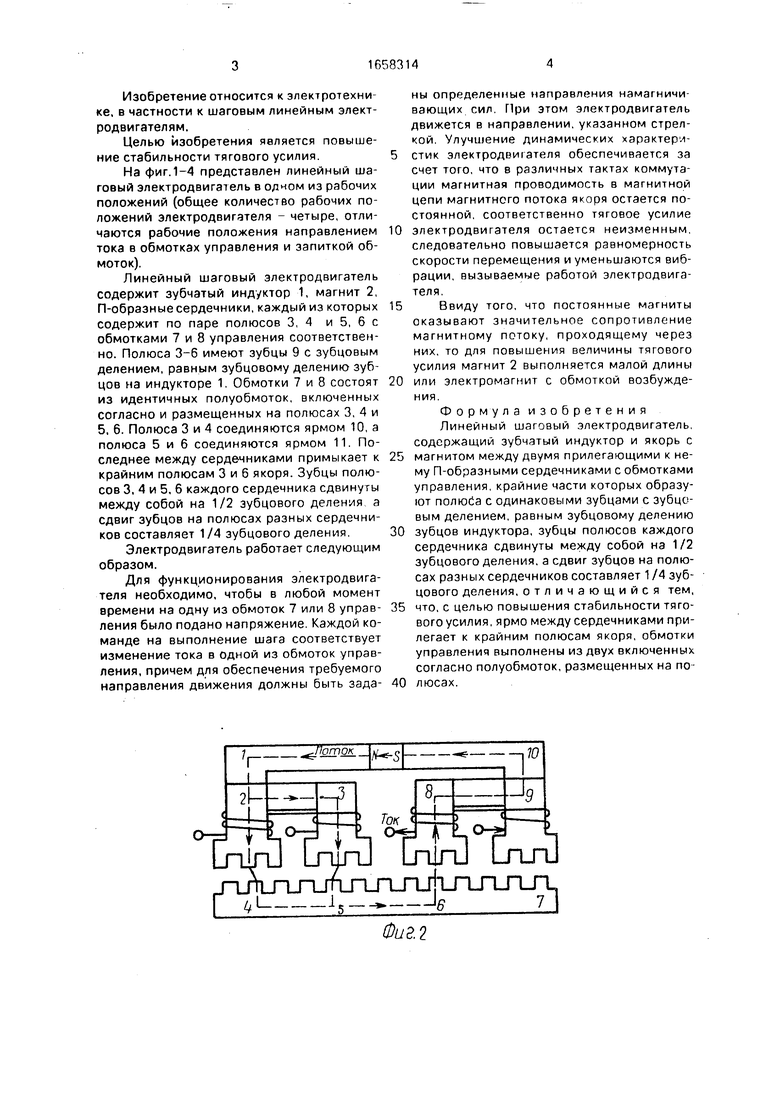
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU2030080C1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU989699A1 |
| Линейный шаговый электродвигатель | 1984 |
|
SU1365279A1 |
| Линейный шаговый электродвигатель | 1986 |
|
SU1376184A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Многофазный линейный шаговый двигатель | 1981 |
|
SU1001349A1 |
| Линейный шаговый электродвигатель | 1987 |
|
SU1457105A1 |
| Линейный шаговый электродвигатель | 1987 |
|
SU1432680A1 |
| Линейный шаговый электродвигатель | 1989 |
|
SU1700706A1 |
Изобретение относится к элекiротех- нике, к линейному шаговому электроприводу. Цель изобретения - повышение стабильности тягового усилия. Линейный шаговый электродвигатель имеет зубчатый V П индуктор 1, магнит 2, П-образные сердечники, каждый из которых содержит по паре полюсов 3.4 и 5,6 с обмотками 7 и 8 управления соответственно. Полюса 3-6 имеют зубцы 9 с зубцовым делением, равным зуб- цовому делению зубцов на индукторе 1. Обмотки 7 и 8 состоят из идентичных полуобмоток, включенных согласно и размещенных на полюсах 3,4, и 5,6. Полюса 4 и 3 соединяются ярмом 10, а полюса 5 и 6 - ярмом 11. Ярмо 12 между сердечниками примыкает к крайним полюсам 3 и 6 якоря. Указанное расположение обмоток и конструкция магнитопровода якоря обегпечива ют постоянство магнитного сопротивления системы при различных коммутациях обмоток управления, что стабилизирует динамические характеристики электродвигателя. 4 ил. СП С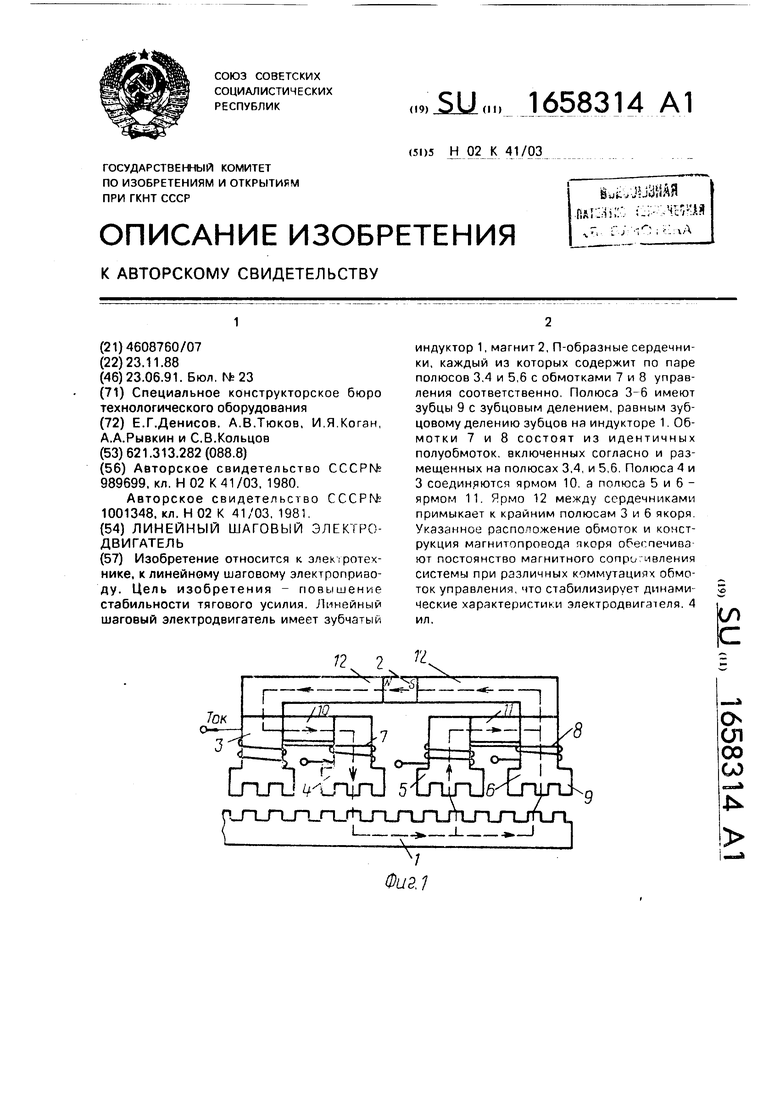
LTLnJ / LTljnJ 5
С
LTLJ
Физ.1
Изобретение относится к электротехнике, в частности к шаговым линейным электродвигателям.
Целью изобретения является повышение стабильности тягового усилия.
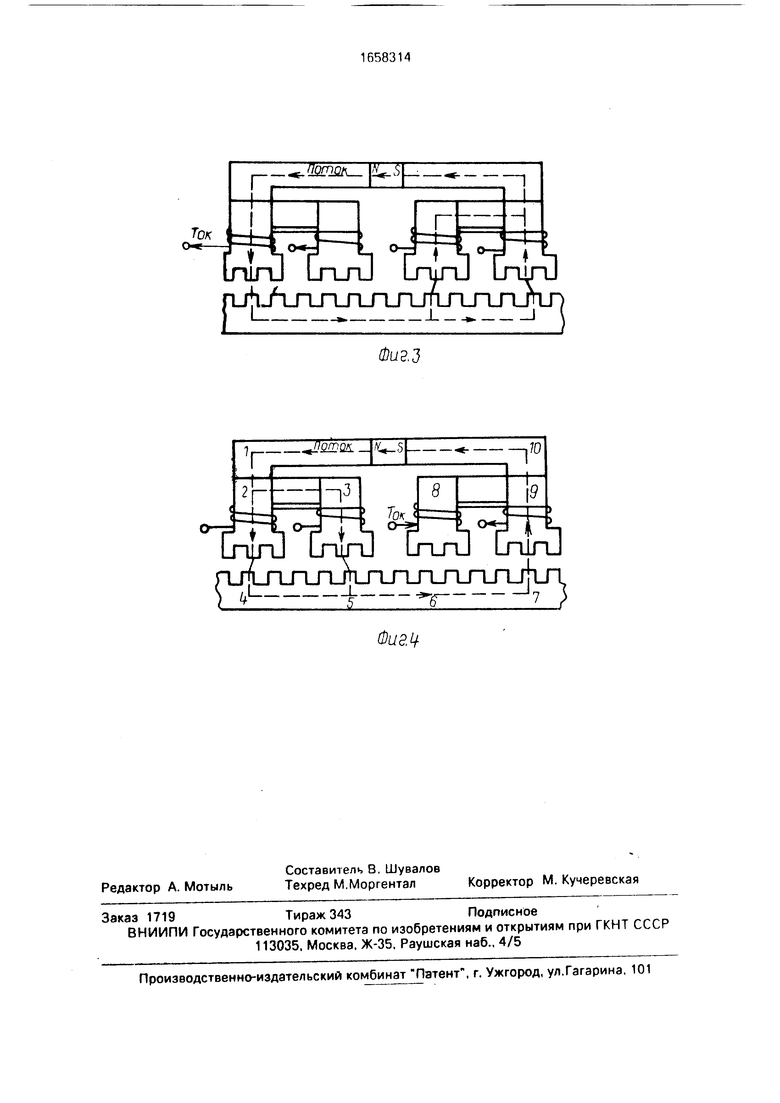
На фиг.1-4 представлен линейный шаговый электродвигатель в одном из рабочих положений (общее количество рабочих положений электродвигателя - четыре, отличаются рабочие положения направлением тока в обмотках управления и запиткой обмоток).
Линейный шаговый электродвигатель содержит зубчатый индуктор 1, магнит 2, П-образные сердечники, каждый из которых содержит по паре полюсов 3, 4 и 5, 6 с обмотками 7 и 8 управления соответственно. Полюса имеют зубцы 9 с зубцовым делением, равным зубцовому делению зубцов на индукторе 1. Обмотки 7 и 8 состоят из идентичных полуобмоток, включенных согласно и размещенных на полюсах 3, 4 и 5, 6. Полюса 3 и 4 соединяются ярмом 10, а полюса 5 и 6 соединяются ярмом 11. Последнее между сердечниками примыкает к крайним полюсам 3 и 6 якоря. Зубцы полюсов 3, 4 и 5, б каждого сердечника сдвинуты между собой на 1/2 эубцового деления, а сдвиг зубцов на полюсах разных сердечников составляет 1/4 зубцового деления.
Электродвигатель работает следующим образом.
Для функционирования электродвигателя необходимо, чтобы в любой момент времени на одну из обмоток 7 или 8 управ- ления было подано напряжение. Каждой команде на выполнение шага соответствует изменение тока в одной из обмоток управления, причем для обеспечения требуемого направления движения должны быть зада-
Ш1л LTLrU
L«Jl J l«J 1чяД t 1™J LniJ LwJ tanJ ™Q
Г ,
ны определенные направления намагничивающих сил. При этом электродвигатель движется в направлении, указанном стрелкой. Улучшение динамических характеристик электродвигателя обеспечивается за счет того, что в различных тактах коммутации магнитная проводимость в магнитной цепи магнитного потока якоря остается постоянной, соответственно тяговое усилие электродвигателя остается неизменным, следовательно повышается равномерность скорости перемещения и уменьшаются вибрации, вызываемые работой электродвигателя.
Ввиду того, что постоянные магниты оказывают значительное сопротивление магнитному потоку, проходящему через них, то для повышения величины тягового усилия магнит 2 выполняется малой длины или электромагнит с обмоткой возбуждения.
Формула изобретения Линейный шаговый электродвигатель, содержащий зубчатый индуктор и якорь с магнитом между двумя прилегающими к нему П-образными сердечниками с обмотками управления, крайние части которых образуют полюйа с одинаковыми зубцами с зубцовым делением, равным зубцовому делению зубцов индуктора, зубцы полюсов каждого сердечника сдвинуты между собой на 1/2 зубцового деления, а сдвиг зубцов на полюсах разных сердечников составляет 1 /4 зубцового деления, отличающийся тем, что, с целью повышения стабильности тягового усилия, ярмо между сердечниками прилегает к крайним полюсам якоря, обмотки управления выполнены из двух включенных согласно полуобмоток, размещенных на полюсах.
Фиг. 2
ыы fi-i | Ч-l «-«-
njjiAjnjiJTJiJTJi
U,J
TTL Cnlru
иг
| Линейный шаговый электродвигатель | 1981 |
|
SU989699A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU1001348A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
