/////////////////
0Vg.f
Изобретение относится к машиностроению и касается стендов для испытания в вакууме подшипников.
Целью изобретения является повьше- .ние производительности испытаний путем исключения приостановлений вращения ротора для измерения момента сопротивления в подшипниках.
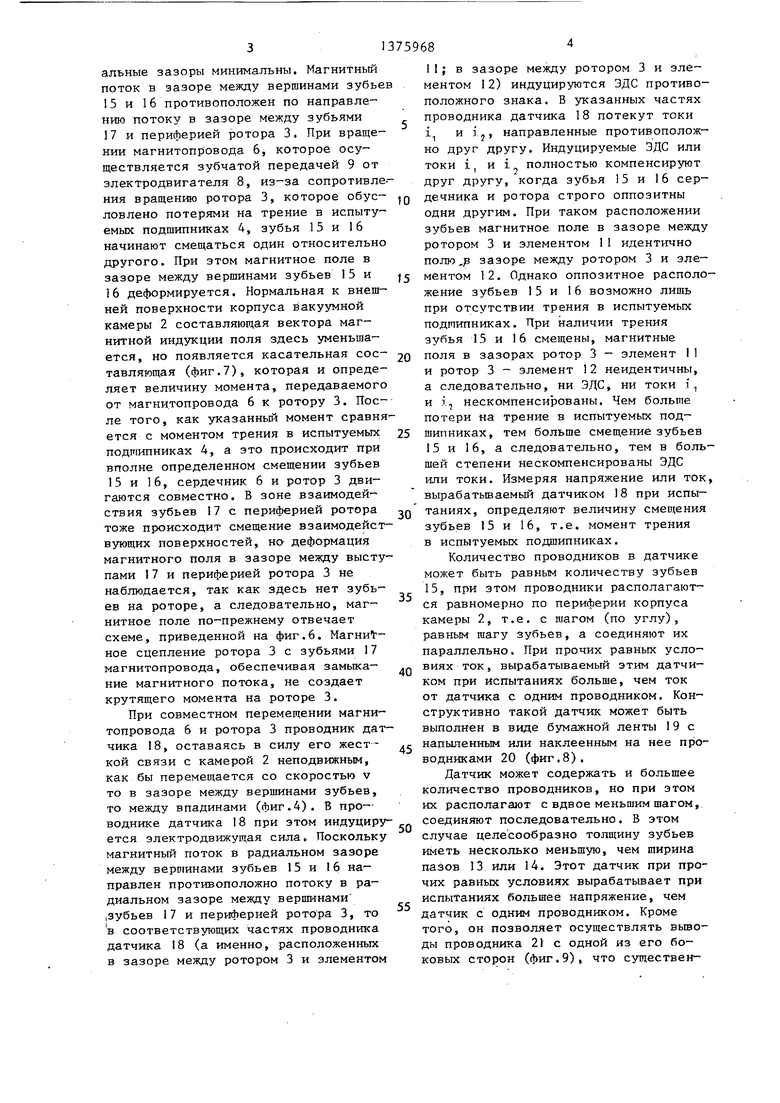
На фиг.1 изображена схема предла- гаемого стенда; на фиг,2 - схема расположения пазов на роторе и магни- топроводе в зоне их сцепления; на фиг,3 - схема расположения пазов на магнитопроводе в зоне отсутствия сцепления его с ротором; на фиг,4 - развертка магнитопровода, ротора и цилиндрической оболочки корпуса вакуумной камеры; на фиг,5 - схема магнитного поля в зазоре между зубьями ро- тора и магнитопровода при отсутствии трения в испытуемых подшипниках; на фиг,6 - схема магнитного поля в зазоре между зубьями магнитопровода и периферией ротора; на фиг,7 - схема магнитного поля в зазоре между зубьями ротора и магнитопровода при наличии трения в испытуемых подшипниках; на фиг,8 - датчик с параллельным соединением проводников; на фиг,9 - дат- чик с последовательным соединением проводников; на фиг,10 - схема стенда с осеозым и радиальным нагружением испытуемых подшипников,
На основании 1 стенда установлена вакуумная камера 2, корпус которой вьшолнен в виде тонкостенного цилиндра, изготовленного из немагнитного материала, например стали Х18Н10Т, Камера подключена с помощью вакуум- ной арматуры к посту для откачки воздуха из камеры 2 (не показан),Ротор 3, выполненный из магнитомягкого материала, например стали 10, установлен внутри корпуса камеры 2 на испы- туемых подшипниках 4, Побудитель вращения ротора 3 содержит установленную на основании 1 электромагнитнздо катушку 5 с магнитопроводом 6, причем последний выполнен в виде втулки,рас- положенной снаружи корпуса камеры 2 коаксиально ротору 3 в подшипниках 7 Электродвигатель 8 привода с помощью зубчатой передачи 9 кинематически связан с магнитопрбводом 6, Магнито- провод 6 имеет кольцевую вставку 10, изготовленную как и корпус камеры 2 из немагнитного материала. Вставка 10 жестко связьшает между собой магнитопроводные кольцевые элементы 11 и 12, например они приварены к вставке 10, Ротор 3 и магнитопровод 6 снабжены пазами; По одну сторону от немагнитной вставки 10, например, в зоне коаксиального сопряжения магни- топроводного элемента 11 с ротором 3 они имеют пазы 13 и 14, которые обуславливают образование зубьев 15 и 16 соответственно (фиг,2), С противоположной стороны от вставки 10, в данном случае в зоне коаксиального сопряжения элемента 12 с ротором 3, пазы 13 или 14 продолжены только на сердечнике 6 или роторе 3, На фиг,3 представлен вариант, в котором в зоне коаксиального сопряжения элемента 12 с ротором 3 пазы выполнены на магнитопроводе 6 и.они являются продолжением пазов 13, а зубья 17 - продолжением зубьев 15,
На внешней поверхности цилиндрической оболочки корпуса камеры 2 жестко установлен, например приклеен к ней, датчик 18 (фиг,4), Датчик 18 выполнен в частности в виде одного электрически изолированного от корпуса камеры 2 проводника. Длина проводника и его расположение выбраны таковыми, что он пересекает по всей ширине зону коаксиального сопряжения сердечника 6 с ротором 3, Датчик подключен к измерительному устройству (не показано).
Стенд работает следующим образом, После установки ротора 3 в испытуемых подшипниках 4 внутри вакуумной камеры 2 из нее откачивается воздух. По достижению требуемого вакуума электромагнитную катушку 5 подключают к источнику постоянного тока Создаваемый ею магнитный поток замыкается в магнитной цепи, образованной элементами 11 и 12 магнитопрово- да 6 и ротором 3, Ход замыкания маг- нитного потока представлен на фиг, I пункти-рной линией со стрелками. Немагнитная вставка 10 сердечника 6 и немагнитная цилиндрическая оболочка камеры 2 не позволяют осуществиться замыканию иньм путем. Магнитный поток в радиальном зазоре между маг- нитоПроводным элементом 11 и ротором 3 сосредоточен преимущественно на вершинах зубьев 15 и 16 (фиг,5), а в зазоре между элементом 12 и ротором 3 - на вершинах зубьев 17 (фиг,6) так как именно в этих местах радиальные зазоры минимальны. Магнитный поток в зазоре между вершинами зубье
15и 16 противоположен по направлению потоку в зазоре между зубьями
17 и периферией ротора 3. При вращении магнитопровода 6, которое осуществляется зубчатой передачей 9 от электродвигателя 8, из-за сопротивления вращению ротора 3, которое обусловлено потерями на трение в испытуемых подшипниках 4, зубья 15 и 16 начинают смещаться один относительно другого. При этом магнитное поле в зазоре между вершинами зубьев 15 и
16деформируется. Нормальная к внешней поверхности корпуса вакуумной камеры 2 составляющая вектора магнитной индукции поля здесь уменьшается, но появляется касательная составляющая (фиг.7), которая и определяет величину момента, передаваемого от магнитопровода 6 к ротору 3. После того, как указанный момент сравняется с моментом трения в испытуемых подшипниках 4, а это происходит при вполне определенном смещении зубьев 15 и 16, сердечник 6 и ротор 3 двигаются совместно. В зоне взаимодействия зубьев 17 с периферией ротора тоже происходит смещение взаимодействующих поверхностей, на деформация магнитного поля в зазоре между выступами I7 и периферией ротора 3 не наблюдается, так как здесь нет зубьев на роторе, а следовательно, магнитное поле по-прежнему отвечает схеме, приведенной на фиг.6. MarHHl-- ное сцепление ротора 3 с зубьями 17 магнитопровода, обеспечивая замыкание магнитного потока, не создает крутящего момента на роторе 3.
При совместном перемещении магнитопровода 6 и ротора 3 проводник датчика 18, оставаясь в силу его жесткой связи с камерой 2 неподвижным, как бы перемещается со скоростью v то в зазоре между вершинами зубьев, то между впадинами (фиг.4). В про- воднике датчика 18 при этом индуцируется электродвижущая сила. Поскольку магнитный поток в радиальном зазоре между верп1инами зубьев 15 и 16 направлен противоположно потоку в радиальном зазоре между вершинами
,зубьев 17 и периферией ротора 3, то в соответствующих частях проводника датчика 18 (а именно, расположенных в зазоре между ротором 3 и элементом
10
t5
0
5
0
5
0
5
0
5
I I; в зазоре между ротором 3 и элементом 12) индуцируются ЭДС противоположного знака. В указанных частях проводника датчика 18 потекут токи i и ij, направленные противоположно друг другу. Индуцируемые ЭДС или токи i, и i полностью компенсируют друг другу, когда зубья 15 и 16 сердечника и ротора строго оппозитны одни другим. При таком расположении зубьев магнитное поле в зазоре между ротором 3 и элементом 11 идентично полю,р зазоре между ротором 3 и элементом 12. Однако оппозитное расположение зубьев 15 и 16 возможно лишь при отсутствии трения в испытуемых подшипниках. При наличии трения зубья 15 и 16 смещены, магнитные поля в зазорах ротор 3 - элемент I1 и ротор 3 - элемент 12 неидентичны, а следовательно, ни ЭДС, ни токи i и 1., нескомпенсированы. Чем больше потери на трение в испытуемых подшипниках, тем больше смещение зубьев 15 и 16, а следовательно, тем в большей степени нескомпенсированы ЭДС или токи. Измеряя напряжение или ток, вырабатьюаемьш датчиком 18 при испытаниях, определяют величину смещения зубьев 15 и 16, т.е. момент трения в испытуемых подшипниках.
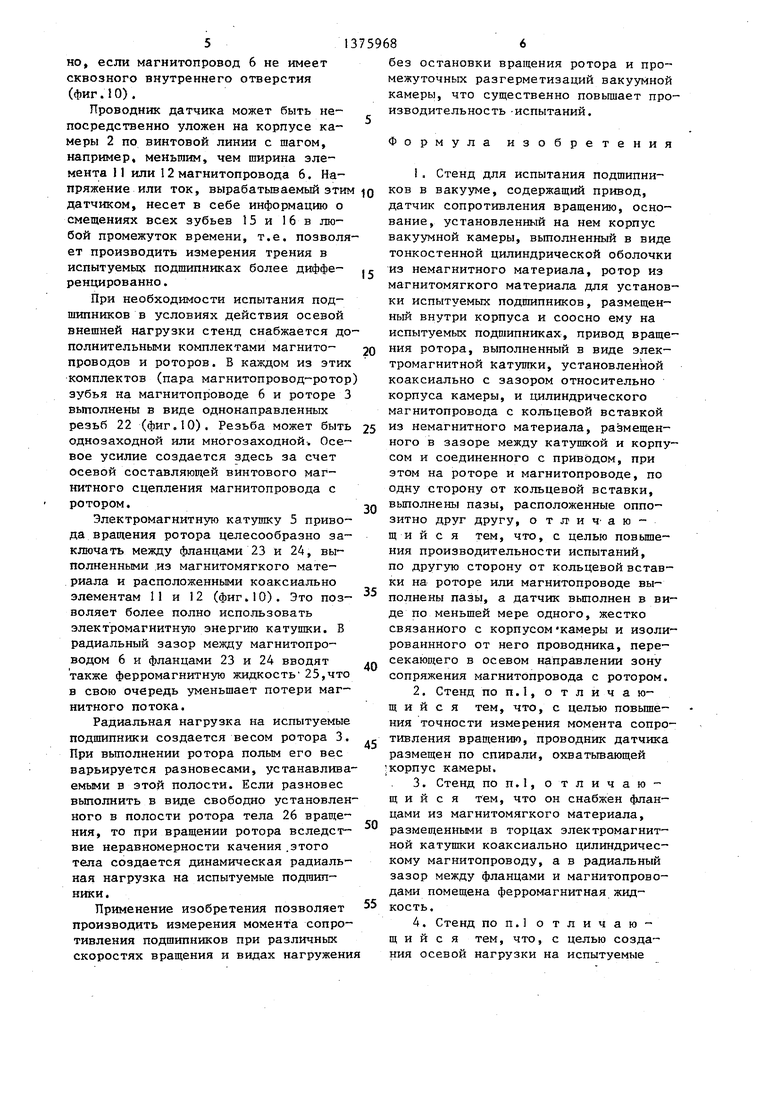
Количество проводников в датчике может быть равным количеству зубьев 15, при этом проводники располагаются равномерно по периферии корпуса камеры 2, т.е. с шагом (по углу), равным шагу зубьев, а соединяют их параллельно. При прочих равных условиях ток , вырабатываемый этим датчиком при испытаниях больше, чем ток от датчика с одним проводником. Конструктивно такой датчик может быть выполнен в виде бумажной ленты 19 с напыленным или наклеенным на нее проводниками 20 (фиг.8).
Датчик может содержать и большее количество проводников, но при этом их располагают с вдвое меньшим шагом, соединяют последовательно. В этом случае целесообразно толщину зубьев иметь несколько меньшую, чем ширина пазов 13 или 14. Этот датчик при прочих равных условиях вырабатывает при испы Ганиях большее напряжение, чем датчик с одним проводником. Кроме того, он позволяет осуществлять вьшо- ды проводника 21 с одной из его боковых сторон (фиг.9), что существен-
13759686
без остановки вращения ротора и промежуточных разгерметизаций вакуумной камеры, что существенно повышает производительность -испытаний.
но, если магнитопровод о не имеет сквозного внутреннего отверстия (фиг.10).
Проводник датчика может быть непосредственно уложен на корпусе камеры 2 по винтовой линии с шагом, например, меньшим, чем ширина элемента 11 или 12 магнитопровода 6. Напряжение или ток, вырабатьюаемый этим 0 ° вакууме, содержащий привод.
Формула изобретения 1. Стенд для испытания подшипни ° вакууме, содержащий привод.
Формула изобретения 1. Стенд для испытания подшипни
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОШПИНДЕЛЬ | 2013 |
|
RU2528420C1 |
| Способ испытания подшипников скольжения с тканевым рабочим слоем на работоспособность и стенд для его осуществления | 1990 |
|
SU1804603A3 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| Стенд для испытаний подшипников в вакууме | 1991 |
|
SU1820272A1 |
| Электрическая машина | 1990 |
|
SU1794271A3 |
| ЭЛЕКТРОШПИНДЕЛЬ | 2011 |
|
RU2479095C2 |
| Установка для испытания пар трения | 1983 |
|
SU1114840A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2079952C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |
Изобретение относится к области машиностроения, в частности к стендам для испытания подшипников в вакууме. Цель изобретения - повышение производительности испытаний. Стенд содержит вакуумную камеру. Цилиндрический корпус 2 изготовлен из немагнитного материала. Ротор 3 из магни- томягкого материала установлен внутри на испытуемых подшипниках 4.Ко- аксиально корпусу 2 установлена электромагнитная катушка 5, а в зазоре между ней и корпусом размещен магни- В и - к- топровод 6 с кольцевой вставкой IО из немагнитного материала, соединенный с приводом вращения 8 посредством зубчатой передачи 9. На элементах 11 и I2 магнитопровода 6 и на одном из концов ротора 3 выполнены продольные пазы, образующие выетупы.При вращении магнитопровода 6 магнитный поток, создаваемый катушкой 5, замы- кается через элементы II, 12 и ротор ,3. За счет магнитного сцепления между выступами на одном конце ротора 3 и магнитопроводе 6 ротор 3 увлекается во вращение. При этом момент сопротивления в подшипниках вызывает относительное смещение выступов,что обусловливает разную величину нормальной составляющей магнитной ин- дзтсции потока между ротором 3 и элементами 11 и 12, вызывая некомпенсированную ЭДС в проводнике, размещенном в осевом направлении на корпусе 2 вакуумной камеры. 4 з.п. ф-лы, 10 ил. Д /////////////////// с & сл bo vj oi со О) 00
датчиком, несет в себе информацию о смещениях всех зубьев 15 и 16 в любой промежуток времени, т.е. позволяет производить измерения трения в испытуемых подшипниках более диффе- ренцированно.
При необходимости испытания подшипников в условиях действия осевой внешней нагрузки стенд снабжается дополнительными комплектами магнито- проводов и роторов. В каждом из этих комплектов (пара магнитопровод-ротор зубья на магнитопроводе 6 и роторе 3 вьтолнены в виде однонаправленных резьб 22 (фиг.10). Резьба может быть однозаходной или многозаходной-. Осевое усилие создается здесь за счет Осевой составляющей винтового магнитного сцепления магнитопровода с ротором.
Электромагнитную катушку 5 привода вращения ротора целесообразно заключать между фланцами 23 и 24, выполненными .из магнитомягкого материала и расположенными коаксиально элементам 11 и 12 (фиг.10). Это позволяет более полно использовать электромагнитнзто энергию катушки. В радиальный зазор между магнитопро- водом 6 и фланцами 23 и 24 вводят также ферромагнитную жидкость 25,что в свою очередь уменьшает потери магнитного потока.
Радиальная нагрузка на испытуемые подшипники создается весом ротора 3. При вьшолнении ротора полым его вес варьируется разновесами, устанавливаемыми в этой полости. Если разновес вьтолнить в виде свободно установленного в полости ротора тела 26 вращения, то при вращении ротора вследствие неравномерности качения .этого тела создается динамическая радиальная нагрузка на испытуемые подшипники.
Применение изобретения позволяет производить измерения момента сопротивления подшипников при различных скоростях вращения и видах нагружени
Q
0
5
0
5
датчик сопротивления вращению, основание, установленный на нем корпус вакуумной камеры, вьтолненный в виде тонкостенной цилиндрической оболочки из немагнитного материала, ротор из магнитомягкого материала для установки испытуемых подшипников, размещенный внутри корпуса и соосно ему на испытуемых подшипниках, привод вращения ротора, выполненный в виде электромагнитной катушки, установленной коаксиально с зазором относительно корпуса камеры, и гщлиндрического магнитопровода с кольцевой вставкой из немагнитного материала, размещенного в зазоре между катушкой и корпусом и соединенного с приводом, при этом на роторе и магнитопроводе, по одну сторону от кольцевой вставки, выполнены пазы, расположенные оппо- зитно друг другу, о тл ич аю- щ и и с я тем, что, с целью повышения производительности испытаний, по другую сторону от кольцевой вставки на роторе или магнитопроводе выполнены пазы, а датчик выполнен в виде по меньшей мере одного, жестко связанного с корпусом камеры и изоли- рованнного от него проводника, пере- секаюп его в осевом направлении зону сопряжения магнитопровода с ротором.
щ и и с я тем, что, с целью повьшге- ния точности измерения момента сопротивления вращению, проводник датчика размещен по спирали, охватьгоающей /корпус камеры.
713759688
подшипники, пазы на роторе и магни- ния динамической радиальной нагрузки топроводе вьшолиены в виде однонаправ- на испытуемые подшипники, он снабжен ленных спиральных канавок телом вращения, а ротор выполнен по5. Стенд по п.1, о т л и ч а ю- , лым, при этом тело вращения помещено щ и и с я тем, что, с целью созда- в полости ротора.
/.
/J
J6
Фиг.1
/ /
fP4
J
tittttm
Ю
jtf
IT
/TTTt.
.г tffffffff
{iiiJiiii
фиг. 5
fZ
фиг.З
18
fZ
Фиг.
6 „
в //
/ /
, /k,,
te
Xxxvvx
фиъ,&
Фиг.7
фиъ. 9
///////.
ш
г$ 2 f23
/ /J ////////// //.
