00 ел
Изобретение относится к измерительной технике, а именно к технике бесконтактных измерений координатных точек внешней и внутренней поверхностей выпуклых объектов.
Цель изобретения - повышение быстродействия устройства и достоверности результатов измерений путем исключения возвратно -поступательного движения ультразвукового преобразователя по меридиану объекта.
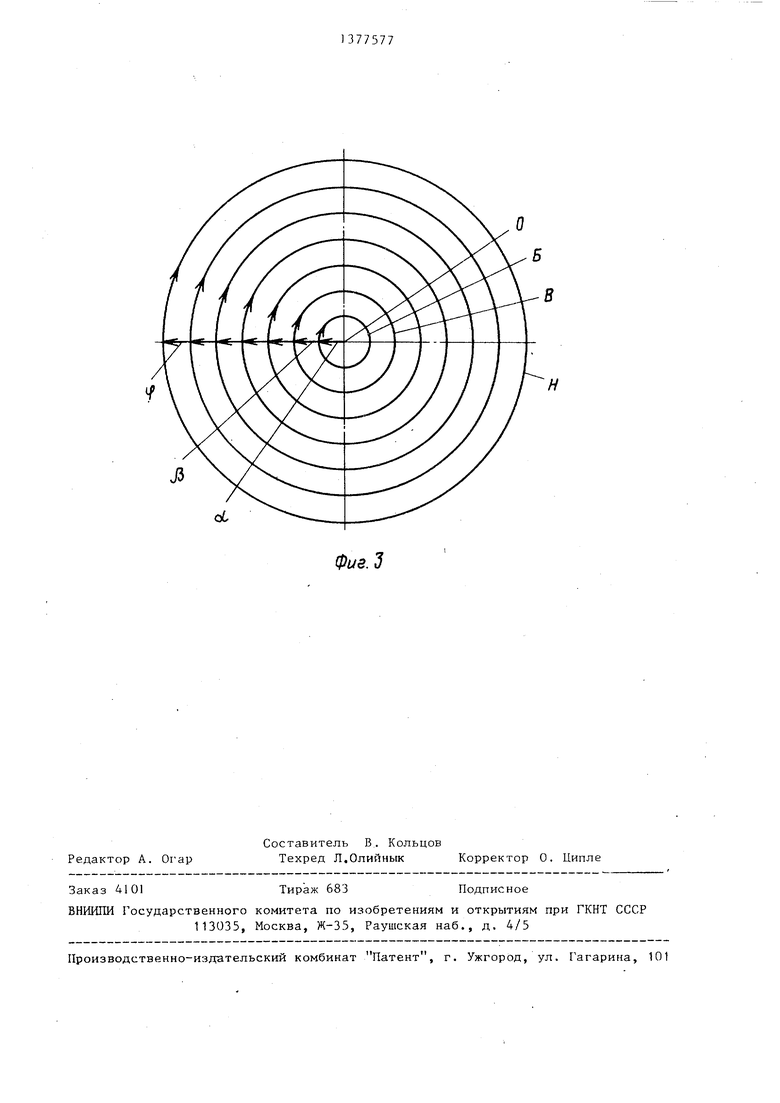
На фиг. 1 представлено устройство для измерения сферических координат поверхности вьшуклых объектов на фиг. 2 - разрез А-А. на фиг. 1 с повернутым на угол oi внутренним вилкообразным каркасом; на -фиг. 3 - траектория движения ультразвукового преобразователя, план.
Устройство содержит .основание 1 , на котором установлен привод 2 перемещения датника по параллели с полым валом 3, приводящий в действие наружный вилкообразный каркас 4, внутри которого на оси 5 и валу 6 установлен внутренний вилкообразный каркас 7 с размещенным на нем ульт- развуковым преобразователем 8, привод 9 перемещения ультразвукового преобразователя 8 по меридиану, подвижный контакт 10, блок 11 управления, генератор-приемник 12 сигналов, кабель 13 и держатель 14, на котором закреплен измеряемый объект 15.
Устройство для измерения сферических координат поверхности вьтукльпс объектов работает следующим образом Ультразвуковой преобразователь 8 устанавливается в исходное положение так, чтобы его акустическая ось совпадала с осью вращения наружного вилкообразного каркаса 4 в точке О (фиг.З). После этого по команде с блока 11 управления включается генератор-приемник 12 сигналов и начинается обработка программы перемещения преобразователя 8 по параллели с помощью привода 2 и по меридиану с помощью привода 9. Первое измерение геометрических параметров объекта 15 происходит в исходном по жении. Полученные данные по кабелю 13 передаются на экран генератора- приемника 12 сигналов или поступают на ЭВМ для дальнейшей обработки, причем одновременно регистрируются эхо-сигналы от передней и задней сте
нок измеряемого объекта 15. Привод 9 перемещения ультразвукового преобразователя 8 по меридиану через вал 6 поворачивает внутренний вил - кообразный каркас 7 на заданный угол oi. (фиг.2), переводя ультразвуковой преобразователь 8 на первую параллель Б (фиг. 3). Привод 2, установленный на основании 1, через полый вал 3 приводит в действие наружный вилкообразный каркас 4, который перемещает ультразвуковой преобразователь 8 по параллели Б. При этом ультразвуковой преобразователь 8 проводит измерение и передает полученную информацию на экран генератора-приемника 12 сигналов или на ЭВМ. Если ультразвуковой преобразователь 8 совершил полный оборот по данной параллели, то привод 9 перемещает его на новую параллель 8 (фиг. 3), где описанный процесс повторяется. Таким образом.происходит измерение по всему полушарию вплоть до параллели Н (фиг. 3). Необходимость измерений параметров по второму полушарию исключается, так как полученные эхо-сигналы содержат информацию о координатах передней и задней стенок объекта 15 одновременно.
Использование устройства для измерения сферических координат поверхности выпуклых объектов позволяет повысить производительность контроля объектов сложной формы путем обеспечения перемещения ультразвукового преобразователя как по меридиану, так и по замкнутым параллелям без изменения направления его движения.
Формула изобретения
Устройство для измерения сферических координат поверхности выпуклых объектов, содержащее соединенные метау собой генератор-приемник и ультразвуковой преобразователь, механизм перемещения ультразвукового преобразователя по меридиану с приводом и блоком управления перемещения преобразователя, отличаю.щее- с я тем, что, с целью повьшгения быстродействия и достоверности результатов измерений, оно снабжено механизмом перемещения ультразвукового преобразователя по параллели, вьтолненным в виде привода перемещения ультразвукового преобразователя по параллели наружного вилкообразного каркаса, соединенного с возможностью вращения вокруг своей оси с приводом перемещения ультразвукового преобразователя по параллели, механизм перемещения ультразвукового преобра13775776
внутреннего вилкообразного каркаса, гаарнирно соединенного с наружным вилкообразным каркасом и приводом перемещения ультра-звукового преобразователя по меридиану с возможностью вращения вокруг- своей оси, а оси вращения наружного и внутреннего вилкообразных каркасов взаимно перпен- 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 1999 |
|
RU2168201C1 |
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |
| Способ ультразвукового томографического контроля изделий | 1990 |
|
SU1817019A1 |
| Многоканальная электронно-лучевая трубка для когерентно-оптической обработки сигналов | 1982 |
|
SU1022335A1 |
| ОПТИЧЕСКИЙ МИНИСТИК | 2015 |
|
RU2594992C2 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2005 |
|
RU2282875C1 |
| Акустический способ и устройство измерения параметров морского волнения | 2019 |
|
RU2721307C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| ДИАГНОСТИРУЮЩИЙ И ЛЕЧЕБНЫЙ КОМПЛЕКС С ЭЛЕКТРОМАГНИТНЫМ ИЗЛУЧЕНИЕМ | 2002 |
|
RU2226116C2 |
| Векторный автономный регистратор | 2023 |
|
RU2799973C1 |

Изобретение относится к акустическим методам неразрушающего контроля. Целью изобретения является повышение быстродействия устройства И достоверности результатов измерений путем обеспечения перемещения ультразвукового преобразователя по меридиану, так и по замкнутым параллелям без изменения направления его движения. Сигнал с генератораприемника 1 2 через подвижный контакт 10поступает на ультразвуковой преобразователь 8, установленный на внутреннем вилкообразном каркасе 7, который с помощью привода 9 вращается на оси 5 и валу 6 внутри вилкообразного каркаса 4, соединенного полым валом 3 с приводом 2, установленным на основании 1. Приводы 2 и 9 осуществляют программное перемещение ультразвукового преобразователя 8 по параллели и замкнутым меридианам по команде с блока 11управления. В процессе движения измеряется расстояние от ультразвукового преобразователя 8 до передней и задней стенок контрол11руемого объекта 15, закрепленного в держателе 14, и полученная информация передается по кабелю 13 на экран генератора-приемника 12 сигналов или На ЭВМ. 3 ил. С «б (Л
зователя по меридиану вьтолнен в виде дикулярны и лежат в одной плоскости.
б
/3
ot
физ.З
Редактор А. Огар
Составитель В,. Кольцов
Техред Л.Олийнык Корректор О. Ципле
Заказ 4101
Тираж 683
ВНИИ1Ш Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Г агарина, 101
Подписное
