Изобретение относится к области гидроакустики, в частности, к акустическим способам и приборам для измерения и регистрации параметров морского волнения методом импульсной эхолокации полигармоническим ультразвуковым сигналом, излучаемым со стороны дна к границе раздела «вода-воздух».
Изобретение может быть применено для измерения параметров волнения моря (высоты, периода, длины и направления распространения волны) с высокой точностью в значительном диапазоне изменения их величин.
В акустических методах измерения расстояний в водной среде используется ультразвуковое облучение контролируемого объекта со стороны измерительного устройства, в результате чего осуществляется одномерное измерение взаимного пространственного положения некоторого участка объекта и измерительного устройства, т.е. определение удаления объекта от средства измерения. В гидролокации дистанция до объекта при установлении акустического контакта измеряется посредством определения интервала времени, затрачиваемого для прохождения соответствующего пути «туда и обратно» ультразвуковыми волнами. Однако немодулированные ультразвуковые колебания, излучаемые электроакустическим преобразователем и распространяющиеся в водной среде, являются лишь средством связи с объектом измерений и сами по себе не являются источником достоверной информации об удалении отражающей поверхности от средств измерений. Определение расстояния обеспечивается при модуляции ультразвуковых сигналов тем или иным способом и измерении времени, прошедшего с момента излучения промодулированных колебаний до момента их приема, причем, предполагается, что скорость распространения колебаний в среде известна. Разрешающая способность акустических волнографов, т.е. их свойство достоверно обнаруживать наименьшее изменение измеряемого расстояния, определяется такими их характеристиками, как вид модуляции излучаемых колебаний, способы обработки принимаемых сигналов и коррекции непостоянства скорости звука, а также в определенной мере рельефом отражающей поверхности объекта и ее акустическими параметрами (волновое сопротивление). Альтиметры разделяются на системы, работающие в надир (надводные) и в зенит (подводные). Но в обоих случаях носитель может быть неподвижным (надводная или подводная платформа, дно моря) или движущимся (самолет, ИСЗ, подводная лодка). В последнем случае обязательно учитываются вертикальные колебания носителя, направление движения его относительно генерального направления волн и угловое распределение энергии в спектре. Точность измерения волновых возвышений определяется диаметром пятна облучения и пространственным спектром поверхности.
Известен эхоимпульсный способ определения дистанции 



1) установка в необходимой части донной поверхности водоема приемоизлучающего электроакустического преобразователя (ЭАП), который соединен кабелем с аппаратурой, а также снабжен пьезоэлементом и узлами экранировки, гидро-, электро- и шумоизоляции;
2) регулировка пространственного расположения акустической оси приемоизлучающего ЭАП до совпадения с вертикалью, что обеспечивает облучение снизу вверх границы раздела «вода-воздух»;
3) осуществление с помощью излучающего тракта аппаратуры генерирование электрических колебаний и их кодирование – преобразование в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму кратковременных импульсов прямоугольной формы с малым временем нарастания фронта, а посылка содержит в себе несущую частоту 
4) преобразование с помощью ЭАП в режиме излучения кодированных электрических колебаний в кратковременные периодические посылки ультразвуковых волн с необходимой длительностью, которые распространяют в направлении участка контролируемой границы объекта, в частности, границы раздела «вода-воздух»;
5) установление акустического контакта с участком контролируемой поверхности объекта, что обусловит отражение посылок ультразвуковых волн;
6) преобразование с помощью ЭАП в режиме приема отраженных ультразвуковых волн в электрические сигналы;
7) в приемном тракте аппаратуры выделение амплитуды информационного сигнала, полученного при отражении только от облучаемой поверхности объекта, в частности, выбранного участка границы раздела «вода-воздух», позволяя судить об его отражательной способности;
8) в приемном тракте аппаратуры снижение влияния непостоянства характеристик гидроакустического канала распространения ультразвуковых волн на результаты измерений;
9) в приемном тракте аппаратуры восстановление функции движения и получение совокупности параметров, характеризующих закономерность изменения пространственного смещения контролируемой поверхности объекта, в частности, выбранного участка границы раздела «вода-воздух» относительно ЭАП;
10) отображение, регистрация и документирование результатов измерений в аппаратуре.
Данный способ реализован в эхоимпульсном локаторе ЭПО-10М, с помощью которого методом обращенного эхолота (излучение снизу вверх по нормали к границе раздела «вода-воздух») измеряется уровень воды в шлюзах, открытых водоемах и т.д., а также параметры ветрового волнения в условиях мелководья (см. Гидролокаторы ближнего действия. А.Н. Яковлев, Г.П. Каблов. Л.: Судостроение, 1983. с.167-178).
Эхоимпульсный способ предполагает выполнение определенной последовательности операций в рабочем цикле для указанного локатора, который содержит синхронизатор, генератор, приемоизлучающий ЭАП, коммутатор, схему временной автоматической регулировки усиления, фильтр низкой частоты, подавитель нулевой помехи, указатель глубины. Синхронизатор вырабатывает периодически повторяющиеся синхронизирующие импульсы, запускающие генератор и другие блоки локатора. С выхода генератора электрический радиоимпульсный сигнал заданной длительности 

Данный способ и реализующее его устройство имеет недостатки и ограничения в применении, связанные с ограничением диапазона проведения достаточно точных измерений прямым счетом основных элементов поверхностного волнения – высоты, длины и периода гравитационной волны, осуществляемых по временной задержке отражений импульсных сигналов от отдельных участков ее профиля. Это обусловлено недостаточной как разрешающей способностью по углу, так и помехоустойчивостью приемоизлучающего ЭАП ( поперечный размер «пятна» ~ 1,4м на границе раздела «вода-воздух» при облучении импульсным ультразвуковым сигналом с глубины 10м). Ограниченность полосы пропускания приемного тракта локатора, реализующего данный способ, приводит к тому, что отраженный от цели импульс не может иметь прямоугольную форму, т.к. форма импульса искажается под влиянием помех и происходит смещение момента перехода импульса через пороговый уровень обнаружения, что снижает точность измерений. Данный способ и реализующее его устройство не обеспечивает возможность прямого измерения генерального направления распространения морских волн и использование резонансного механизма ультразвукового рассеяния для получения сведений о характеристиках взволнованной поверхности.
Признаки, совпадающие с заявляемым способом:
1) установка на донной поверхности водоема донного приемоизлучающего ЭАП, который соединен кабелем с аппаратурой, а также снабжен пьезоэлементом и узлами экранировки, гидро-, электро- и шумоизоляции, причем, акустическая ось ЭАП должна совпадать с вертикалью, обеспечивая облучение снизу вверх границы раздела «вода-воздух»;
2) генерирование с помощью излучающего тракта аппаратуры электрических колебаний и их кодирование – преобразование в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму кратковременных импульсов прямоугольной формы с малым временем нарастания фронта, а посылка содержит в себе несущие колебания с частотой
3) преобразование кодированных электрических колебаний с помощью пьезоэлемента ЭАП, который колеблется на основной толщиной моде в режиме одностороннего поршня, в кратковременные периодические посылки ультразвуковых волн с необходимой длительностью, которые распространяют в направлении участка контролируемой границы объекта, в частности, границы раздела «вода-воздух»;
4) установление акустического контакта с участком границы раздела «вода-воздух», что обусловит отражение посылок ультразвуковых волн;
5) получение за счет отражения ультразвукового сигнала амплитудной информации об облучаемой границе раздела;
6) преобразование с помощью пьезоэлемента ЭАП, который возбуждается на основной толщиной моде отраженными ультразвуковыми волнами, в электрический сигнал;
7) осуществление в приемном тракте аппаратуры обработки (усиление, фильтрация и детектирование) и выделение полезного информационного сигнала, который получен при отражении от облучаемого участка границы раздела «вода-воздух»;
8) восстановление функции движения и получение совокупности параметров, характеризующих пространственное положение контролируемого участка границы раздела «вода-воздух» при использовании приемного тракта аппаратуры;
9) отображение, регистрация и документирование результатов измерений в аппаратуре.
Известен также акустический способ дистанционного определения высоты морских волн, в котором используется корреляционная обработка огибающих эхосигналов от взволнованной поверхности моря (см. авт. свидетельство СССР № 412578, опубл.25.01.1974, Бюл.№3). Использование данного способа определения высоты морских волн предполагает выполнение следующей последовательности операций:
1) заглубление в необходимой части водоема двух приемоизлучающих электроакустических преобразователей (ЭАП) с резонансными частотами 

2) регулировка пространственного расположения акустических осей обоих ЭАП до совпадения с вертикалью при облучении границы раздела «вода – воздух»;
3) разнесение на расстояние 

4) генерирование электрических колебаний и их тонально-импульсное кодирование с помощью излучающего тракта аппаратуры;
5) преобразование кодированных электрических колебаний в кратковременные периодические посылки ультразвуковых волн с необходимой длительностью с помощью обоих ЭАП в режиме излучения, которые распространяют в направлении участка контролируемой границы объекта, в частности, границы раздела «вода-воздух»;
6) установление акустического контакта с участком контролируемой границы раздела «вода-воздух», что обусловит отражение посылок ультразвуковых волн;
7) преобразование с помощью обоих ЭАП в режиме приема отраженных ультразвуковых волн в электрические сигналы, разность частот которых равна их относительному вертикальному разнесению;
8) выделение в приемном тракте аппаратуры (усиление, фильтрация, детектирование) полезных информационных сигналов – огибающих эхосигналов, полученных при отражении от облучаемой поверхности выбранного участка границы раздела «вода-воздух»;
9) измерение в приемном тракте аппаратуры частотно-пространственного в вертикальной плоскости коэффициента взаимной корреляции 

где 


10) расчет средней высоты морских волн по формуле

где 

Данный способ реализован в устройстве для осуществления указанного способа (а.с. СССР № 412578). Устройство содержит синхронизатор, два генератора зондирующих сигналов с прямоугольной огибающей, но различными частотами несущих 

Указанный способ и реализующее его устройство имеет недостатки и ограничения в применении:
1) способ и устройство, его реализующее, имеют ограничения по точности измерения параметров морского волнения, обусловленные тем, что оба излучающих тракта требуют повышенной стабильности частот генераторов, равномерности амплитудно-частотных характеристик ЭАП в рабочих диапазонах частот, не предусмотрена операция контролируемого изменения в некотором диапазоне частот 
2) способ не позволяет оптимизировать характеристики зондирующего ультразвукового поля в соответствии с изменяющимися параметрами морского волнения, эффективность проводимых акустическим волнографом измерений осложняется воздействием объемной реверберации, возникающей в приповерхностном аэрированном слое и маскирующей полезный сигнал от границы раздела «вода-воздух»;
3) отсутствует возможность регулировки угловой ширины основных лепестков обоих ХН ЭАП с резонансными частотами
4) данный способ и реализующее его устройство не обеспечивает возможность измерения генерального направления распространения морских волн и использование резонансного механизма ультразвукового рассеяния для получения сведений о характеристиках взволнованной поверхности.
Признаки, совпадающие с заявляемым способом:
1) установка в объеме водоема приемоизлучающих ЭАП, которые соединены кабелем с аппаратурой, а также снабжены пьезоэлементом и узлами экранировки, гидро-, электро- и шумоизоляции;
2) генерирование с помощью излучающего тракта аппаратуры электрических колебаний и их кодирование – преобразование в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму кратковременных импульсов прямоугольной формы с малым временем нарастания фронта, а посылка содержит в себе несущие колебания с частотой
3) преобразование кодированных электрических колебаний с помощью пьезоэлементов ЭАП, которые колеблются на основной толщиной моде в режиме одностороннего поршня, в кратковременные периодические посылки ультразвуковых волн с необходимой длительностью, которые распространяют в направлении участка границы раздела «вода-воздух»;
4) установление акустических контактов с участком границы раздела «вода-воздух», обусловливающее отражение посылок ультразвуковых волн;
5) получение за счет отражения ультразвуковых сигналов амплитудной информации об облучаемой границе раздела;
6) прием и преобразование с помощью двух ЭАП отраженных ультразвуковых волн в электрические сигналы;
7) обработка (усиление, фильтрация и детектирование) эхосигналов, полученных при отражении от облучаемого участка границы раздела «вода-воздух», и выделение электрического информационного сигнала в приемном тракте аппаратуры, который получен при отражении от облучаемого участка границы раздела «вода-воздух»;
8) восстановление функции движения и получение совокупности параметров, характеризующих пространственное положение контролируемого при использовании приемного тракта аппаратуры;
9) отображение, регистрация и документирование результатов измерений в аппаратуре.
Наиболее близкими аналогами для заявляемого способа и устройства являются соответственно многочастотный эхоимпульсный способ измерения параметров морского волнения и реализующий его акустический волнограф, (патент РФ № 168083, G01S 15/60 , опубл. 17.01.2017, Бюл №2.) С помощью устройства – многочастотного акустического волнографа методом обращенного эхолота (излучение снизу вверх по нормали к границе раздела «вода-воздух») измеряются параметры ветрового волнения в условиях мелководья.
Использование данного способа измерения расстояний предполагает выполнение следующей последовательности операций:
1) размещение на донной поверхности акватории ПАУ полусферической формы, которые выполнено из 
2) выбор для проведения измерений параметров морского волнения верхнего ЭАП, входящего в состав ПАУ полусферической формы, акустическая ось которого совпадает с вертикалью, что обеспечивает излучение снизу вверх по нормали к выбранному участку границы раздела «вода-воздух», для чего последний соединен кабелем с аппаратурой;
3) генерирование с помощью излучающего тракта аппаратуры электрических колебаний и их кодирование – преобразование в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму кратковременных импульсов прямоугольной формы с малым временем нарастания фронта, а полная посылка содержит в себе несущие колебания с частотой
4) преобразование кодированных электрических колебаний с помощью верхнего ЭАП ПАУ в кратковременные периодические посылки ультразвуковых волн с необходимой длительностью, которые распространяются в направлении выбранного участка контролируемой границы раздела «вода-воздух»;
5) формирование в гидроакустическом канале параметрической излучающей антенны (ПИА), в объеме которой распределены нелинейные источники формирующихся спектральных компонент, в результате чего генерируются НЧ (самодемодуляция) и ВЧ (самовоздействие) ультразвуковые сигналы;
6) установление акустического контакта с выбранным участком границы раздела «вода-воздух», что обусловит отражение посылок ультразвуковых волн;
7) получение за счет отражения составляющих полигармонического сигнала амплитудной информации об облучаемом выбранном участке границы раздела на каждой спектральной компоненте;
8) прием и преобразование с помощью верхнего ЭАП ПАУ отраженных ультразвуковых волн в электрические сигналы;
9) осуществление в 
10) подбор регистрируемых спектральных составляющих эхосигналов и вариантов обработки в
11) регулировка точности измерения на выбранном участке границы раздела «вода – воздух» величин ординат ветровой волны за счет изменения разрешающей способности как в вертикальном (длительность зондирующего импульса), так и горизонтальном (угловая ширина по уровню 0,7 основного лепестка ХН) направлениях;
12) выделение полезного информационного сигнала в приемном тракте аппаратуры, который получен при отражении только от выбранного и облучаемого участка границы раздела «вода-воздух»;
13) восстановление функции движения и получение совокупности параметров, характеризующих пространственное положение контролируемого при использовании
14) отображение, регистрация и документирование результатов измерений в аппаратуре.
Аппаратура акустического волнографа (пат. № 168083 РФ G01S 15/60 , опубл. 17.01.2017, Бюл №2) содержит коммутатор «прием-передача», а также тракты излучения и приема. В излучающем тракте генератор соединен через последовательно включенные усилитель мощности и коммутатор с ЭАП, расположенным в верхней части многоэлементного донного ПАУ (полусферическая конструкция, расположенная на донной поверхности в заданной точке акватории). Акустическая ось ЭАП расположена вертикально, т.е. облучение короткими ультразвуковыми импульсами взволнованной границы раздела сред « вода – воздух» осуществляется по кратчайшему расстоянию через нелинейную водную среду, причем, эхосигналы принимаются тем же ЭАП в течение паузы между последовательными импульсами излучения. В приемном тракте аппаратуры волнографа используемый ЭАП соединен через коммутатор со входами 



Данный способ и устройство имеют недостатки и ограничения в применении:
1) в прототипе для получения сведений о закономерности изменения удаления облучаемой границе раздела от ЭАП, который расположен в верхней части донного ПАУ, используется только вертикальное направление облучения, что ограничивает точность измерений, поскольку для получения более полного и точного объема сведений о характеристиках взволнованной поверхности необходимо также использовать наклонное облучение границы раздела;
2) использование резонансного механизма ультразвукового рассеяния для получения сведений о характеристиках взволнованной поверхности должно сопровождаться первоначальным определением генерального направления распространения поверхностной ветровой волны, однако, в способе- прототипе данная операция не осуществима, что снижает достоверность проводимых измерений;
3) в прототипе для первоначально определенного генерального направления распространения поверхностной ветровой волны не реализована возможность классификации по отраженному сигналу параметров процесса морского волнения, в частности, при наклонном облучении в широком диапазоне изменения как углов визирования 
Признаки, совпадающие с заявляемым способом:
1) размещение на донной поверхности акватории ПАУ полусферической формы, которые выполнено из
2) выбор для проведения измерений параметров морского волнения верхнего ЭАП, входящего в состав ПАУ полусферической формы, акустическая ось которого совпадает с вертикалью, что обеспечивает излучение снизу вверх по нормали к выбранному участку границы раздела «вода-воздух», для чего последний соединен кабелем с аппаратурой;
3) генерирование с помощью излучающего тракта аппаратуры электрических колебаний и их кодирование – преобразование в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму кратковременных импульсов прямоугольной формы с малым временем нарастания фронта, а посылка содержит в себе несущие колебания с частотой
4) преобразование кодированных электрических колебаний с помощью верхнего ЭАП ПАУ в кратковременные периодические посылки ультразвуковых волн с необходимой длительностью, которые распространяются в направлении выбранного участка контролируемой границы раздела «вода-воздух»;
5) формирование в гидроакустическом канале ПИА, в объеме которой распределены нелинейные источники формирующихся спектральных компонент, в результате чего генерируются НЧ (самодемодуляция) и ВЧ (самовоздействие) ультразвуковые сигналы;
6) установление акустического контакта с выбранным участком границы раздела «вода-воздух», что обусловит отражение посылок ультразвуковых волн;
7) получение за счет отражения составляющих полигармонического сигнала амплитудной информации об облучаемом выбранном участке границы раздела на каждой спектральной компоненте;
8) прием и преобразование с помощью верхнего ЭАП ПАУ отраженных ультразвуковых волн в электрические сигналы;
9) осуществление в
10) подбор регистрируемых спектральных составляющих эхосигналов и вариантов обработки в
11) регулировка точности измерения на выбранном участке границы раздела «вода – воздух» величин ординат ветровой волны за счет изменения разрешающей способности как в вертикальном (длительность зондирующего импульса), так и горизонтальном (угловая ширина по уровню 0,7 основного лепестка ХН) направлениях;
12) выделение полезного информационного сигнала в приемном тракте аппаратуры, который получен при отражении только от выбранного и облучаемого участка границы раздела «вода-воздух»;
13) восстановление функции движения и получение совокупности параметров, характеризующих пространственное положение контролируемого участка границы раздела «вода-воздух» при использовании
14) отображение, регистрация и документирование результатов измерений в аппаратуре.
Основной задачей изобретения является создание способа, позволяющего осуществлять как определение генерального направления распространения поверхностной ветровой волны, так и использования резонансного механизма ультразвукового рассеяния для получения сведений о характеристиках взволнованной поверхности.
Технический результат изобретения заключается в повышении точности измерения параметров волнения моря (высоты, периода, длины, направления и скорости распространения ветровой волны) в значительном диапазоне изменения их величин.
Технический результат достигается тем, что в известный (патент РФ № 168083) многочастотный эхоимпульсный способ измерения параметров морского волнения, включающий:
1) размещение на донной поверхности акватории ПАУ полусферической формы, которое выполнено из
2) выбор для проведения измерений параметров морского волнения верхнего ЭАП, входящего в состав ПАУ полусферической формы, акустическая ось которого совпадает с вертикалью, что обеспечивает излучение снизу вверх по нормали к выбранному участку границы раздела «вода-воздух», для чего последний соединен кабелем с аппаратурой;
3) генерирование с помощью излучающего тракта аппаратуры электрических колебаний и их кодирование – преобразование в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму кратковременных импульсов прямоугольной формы с малым временем нарастания фронта, а посылка содержит в себе несущие колебания с частотой
4) преобразование кодированных электрических колебаний с помощью верхнего ЭАП ПАУ в кратковременные периодические посылки ультразвуковых волн с необходимой длительностью, которые распространяются в направлении выбранного участка контролируемой границы раздела «вода-воздух»;
5) формирование в гидроакустическом канале ПИА, в объеме которой распределены нелинейные источники формирующихся спектральных компонент, в результате чего генерируются НЧ (самодемодуляция) и ВЧ (самовоздействие) ультразвуковые сигналы;
6) установление акустического контакта с выбранным участком границы раздела «вода-воздух» для отражения посылок ультразвуковых волн;
7) получение за счет отражения составляющих полигармонического сигнала амплитудной информации об облучаемом выбранном участке границы раздела на каждой спектральной компоненте;
8) прием и преобразование с помощью верхнего ЭАП ПАУ отраженных ультразвуковых волн в электрические сигналы;
9) осуществление в
10) подбор регистрируемых спектральных составляющих эхосигналов и вариантов обработки в
11) регулировку точности измерения на выбранном участке границы раздела «вода – воздух» величин ординат ветровой волны за счет изменения разрешающей способности как в вертикальном (длительность зондирующего импульса), так и горизонтальном (угловая ширина по уровню 0,7 основного лепестка ХН) направлениях;
12) выделение полезного информационного сигнала в приемном тракте аппаратуры, который получен при отражении только от выбранного и облучаемого участка границы раздела «вода-воздух»;
13) восстановление функции движения и получение совокупности параметров, характеризующих пространственное положение контролируемого при использовании
14) отображение, регистрация и документирование результатов измерений в аппаратуре.
дополнительно введены следующие операции:
15) выбор двух ЭАП , расположенных на пересечениях заданной параллели и осевого меридиана полусферической поверхности отдельного донного ПАУ, при этом акустические оси обоих ЭАП имеют одинаковые углы наклона 
16) генерирование с помощью излучающего тракта аппаратуры электрических несущих колебаний с частотой
17) синхронное преобразование электрических колебаний с помощью двух ЭАП в импульсный режим излучения ультразвуковых волн, распространяемых в направлении двух выбранных участков границы раздела «вода-воздух», формируя в водной среде две ПИА, в объемах которых распределены нелинейные источники генерируемых спектральных компонент (самовоздействие);
18) генерирование двух полигармонических пучков ультразвуковых сигналов с частотами 

19) установление акустических контактов при облучении двух участков взволнованной границы раздела «вода – воздух», в пределах которых распространяется с горизонтальной скоростью 
20) преобразование с помощью двух ЭАП ПАУ отраженных ультразвуковых волн в электрические сигналы, частоты которых в соответствии с двойным эффектом Доплера изменены на величину сдвига частоты, причем, для первого участка частота повышена, а для второго - уменьшена;
21) осуществление в канале выделения доплеровских частот и вторичной обработки доплеровской информации приемного тракта аппаратуры алгебраического суммирования частот сигналов, принятых двумя ЭАП ПАУ, для каждой гармоники с частотами
22) преобразование полученной информации в код индикаторных элементов и сопряжение с внешними регистрирующими устройствами с последующим отображением, регистрацией и документированием результатов измерений в аппаратуре;
23) выбор следующей пары ЭАП, смещенных относительно исходно выбранной пары, которые также расположены на пересечениях той же заданной параллели и следующего меридиана полусферической поверхности донного ПАУ, при этом акустические оси данной пары ЭАП имеют те же одинаковые углы наклона
24) последовательное выполнение операций, осуществляемых до тех пор, пока в канале выделения доплеровских частот и вторичной обработки доплеровской информации приемного тракта аппаратуры измеряемое значение доплеровской частоты для ультразвуковых сигналов, отраженных от двух облучаемых участков взволнованной границы раздела «вода – воздух», не достигнет максимального значения, что осуществляется при нахождении вектора горизонтальной скорости
25) осуществление в канале выделения доплеровских частот и вторичной обработки доплеровской информации приемного тракта аппаратуры перехода от значения полученной максимальной доплеровской частоты к значению горизонтальной скорости
26) выбор необходимой скоростной чувствительности канала выделения доплеровских частот и вторичной обработки доплеровской информации на гармониках с частотами
27) для найденного генерального направления распространения поверхностной ветровой волны осуществление облучения взволнованной поверхности границы раздела «вода- воздух» под фиксированным углом
28) для найденного генерального направления распространения поверхностной ветровой волны осуществление облучения взволнованной поверхности границы раздела «вода-воздух» при изменении угла
Поставленная задача решается также устройством для реализации способа измерения параметров морского волнения, которое содержит береговую аппаратуру, ПАУ, полусферическая поверхность которого состоит из апертур
Канал обработки доплеровской информации для поиска генерального направления распространения поверхностной ветровой волны содержит два ЭАП, расположенных на пересечениях заданной параллели и осевого меридиана полусферической поверхности донного ПАУ, акустические оси обоих ЭАП имеют одинаковые углы наклона 

Режим нормального облучения ультразвуковыми импульсами участка границы раздела «вода-воздух» обеспечивает канал измерений параметров морского волнения, который содержит ЭАП ПАУ, акустическая ось которого расположена вертикально, выход данного ЭАП соединен через многоканальный управляемый коммутатор со входами 







Режим наклонного облучения ультразвуковыми импульсами участка границы раздела «вода- воздух» обеспечивает канал измерений параметров морского волнения, который содержит ЭАП ПАУ, акустическая ось которого расположена под углом
Устройство выполнено с возможностью наклонного ультразвукового облучения с частотами 


Заявляемые способ и устройство связаны единым изобретательским замыслом и позволяют решить техническую проблему улучшения эксплуатационных качеств гидроакустической аппаратуры с параметрическим режимом излучения, используемой для океанографических исследований.
Заявляемый способ и устройство для его реализации поясняются следующими чертежами.
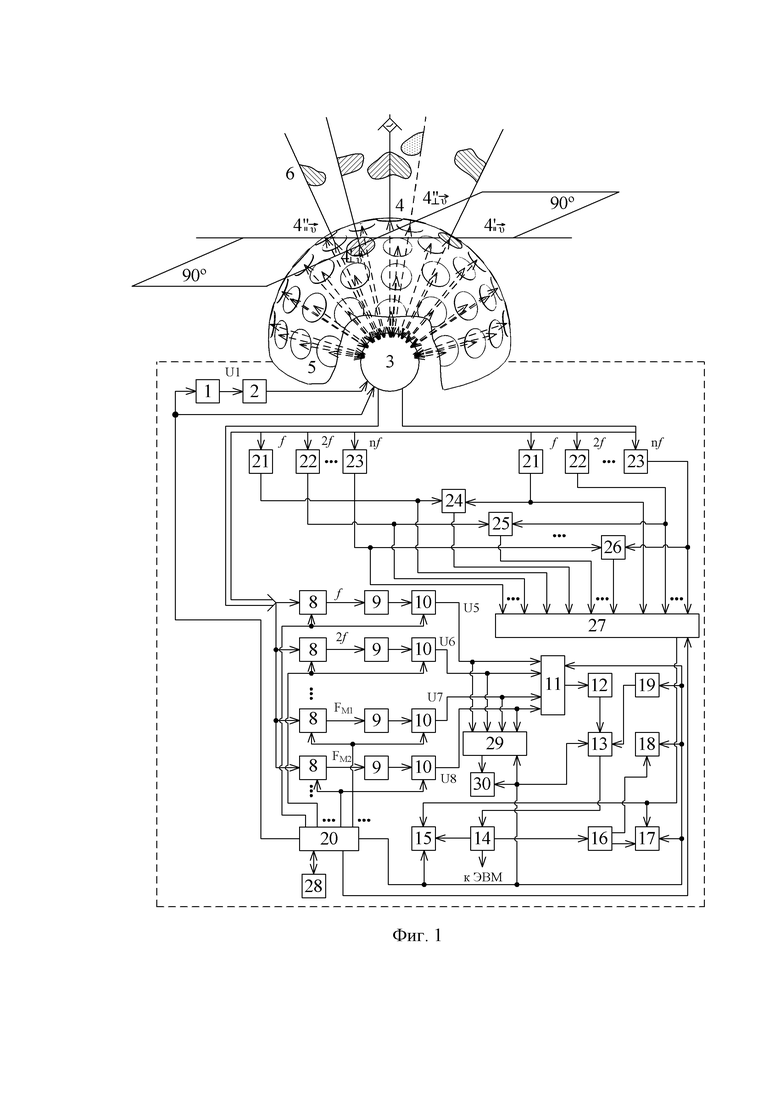
На фиг.1 схематически изображена структурная схема устройства для реализации способа, поясняющая режим обработки доплеровской информации;
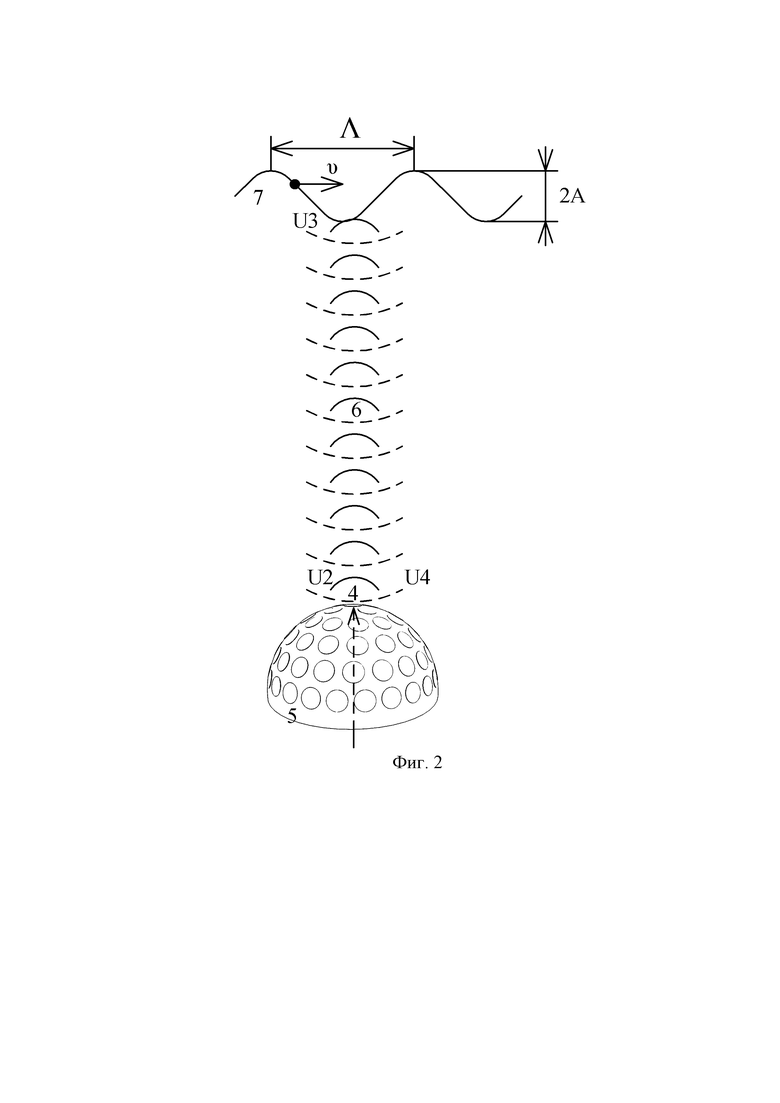
на фиг.2 схематически представлена работа устройства, реализующего способ, в режиме волнографа;
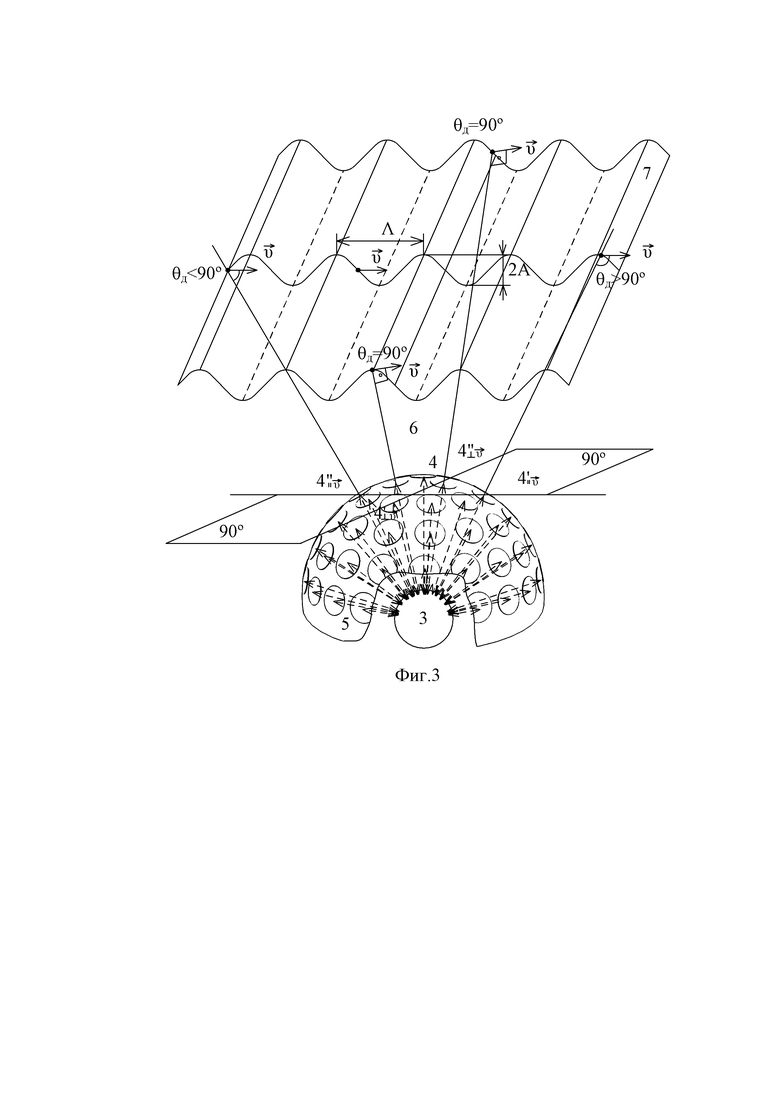
на фиг.3 схематически представлена работа устройства, реализующего способ, в режиме обработки доплеровской информации;
на фиг.4 и 5 изображены экспериментальные угловые и частотные зависимости первых порядков для нормированных амплитуд отраженного сигнала при облучении образца поверхности синусоидального профиля с «резонансной» длиной 



на фиг. 6 представлены экспериментальные угловые зависимости высших порядков для амплитуд отраженного сигнала для поверхностей с заданной «резонансной» длиной 

на фиг.7 представлена расчетная зависимость добротности образцов поверхности синусоидального профиля (кривая 1 -
Устройство для реализации способа содержит ПАУ (раскрытое в описании к патенту РФ № 104732), полусферическая поверхность которого состоит из апертур
Режим нормального облучения ультразвуковыми импульсами участка границы раздела «вода- воздух» обеспечивает канал измерений параметров морского волнения (режим волнографа, пат. № 168083 РФ G01S 15/60 , опубл. 17.01.2017, Бюл №2), в котором используется ЭАП 4. Акустическая ось ЭАП расположена вертикально, т.е. облучение короткими ультразвуковыми импульсами взволнованной границы раздела 7 (фиг. 2,3) сред «вода – воздух» осуществляется по кратчайшему расстоянию через нелинейную водную среду 6. Эхосигналы принимаются тем же ЭАП 4 в течение паузы между последовательными импульсами излучения. В режиме волнографа (фиг. 1 и 2) в приемном тракте береговой аппаратуры выход ЭАП 4 соединен через многоканальный управляемый коммутатор 3 с приемным трактом для обработки высокочастотных и низкочастотных спектральных составляющих эхосигнала с частотами 




Канал обработки доплеровской информации для поиска генерального направления распространения поверхностной ветровой волны содержит два ЭАП 4/, 4//, расположенных на пересечениях заданной параллели и осевого меридиана полусферической поверхности отдельного донного ПАУ 5, акустические оси обоих ЭАП 4/, 4// имеют одинаковые углы наклона 

Поиск генерального направления распространения поверхностной ветровой волны, соответствующего максимальному значению ее горизонтальной скорости
Режим наклонного облучения ультразвуковыми импульсами участка границы раздела «вода- воздух» обеспечивает канал измерений параметров морского волнения. Измерение резонансного ультразвукового рассеяния в режиме волнографа обеспечивает наклонное ультразвуковое облучение с частотами
Заявленный способ реализуется с помощью устройства измерения параметров морского волнения следующим образом.
По команде оператора (или автоматической системы принятия решений) 28 (фиг.1, 2, 3) блок управления и настройки 20 вырабатывает синхроимпульс, поступающий на управляющий вход тактового генератора 19, причем, изменение скорости звука в водной среде 6 учитывается с помощью изменения тактовой частоты его выходного сигнала. С выхода тактового генератора 19 начинают поступать импульсы на вход счетчика импульсов 13, причем, одновременно, с дополнительных выходов блока управления и настройки 20 поступают импульсы на управляющие входы как резонансных усилителей 8 («запирают» на время излучения и ожидания прихода эхосигнала от границы раздела), так и генератора 1, вырабатывающего радиоимпульс 




























где 




















Исследование резонансного механизма ультразвукового рассеяния для получения дополнительных сведений о характеристиках взволнованной поверхности должно сопровождаться первоначальным определением генерального направления распространения поверхностной ветровой волны, в котором
На фиг.3 представлены два варианта расположения обоих ЭАП 4/, 4// на полусферической поверхности донного ПАУ 5, в которых приняты обозначения с нижними индексами: 1) ||










 (4)
(4)


В частотных дискриминаторах 24, 25, …, 26 происходит перемножение поступающих 



где 
Вышеуказанное можно проиллюстрировать следующими расчетными примерами.
Расчетный пример 1. Проиллюстрируем возможность получения различной точности отображения рельефа взволнованной границы раздела «вода-воздух» с использованием каналов обработки амплитудных характеристик эхосигналов ВЧ (самовоздействие) и НЧ (самодемодуляция) приемного тракта устройства. Например, по границе раздела со скоростью 
















Расчетный пример 2.
В данном примере рассмотрена работоспособность и эффективность излучающего тракта устройства в режиме волнографа на основе анализа результатов испытаний рыбопоисковой аппаратуры (РПА) серии «Сарган» в штатных режимах, так как мощность излучения обратимой антенны достаточна для проявления нелинейности упругих свойств водной среды при распространении импульсного сигнала конечной амплитуды с частотой заполнения 





















Ветровое воздействие на водную поверхность заключается в том, что оно создает на ее поверхности давление в направлении своего движения, причем, комбинация поверхностного натяжения и гравитационных сил создает каппилярно-гравитационные волны, для которых соотношение частоты 




где 








Специфические условия эксплуатации устройства в режиме волнографа определяются непрерывным изменением формы отражающей поверхности границы раздела 7 и расстояния до нее. Положение отражающей поверхности «вода-воздух» 7 меняется от горизонтального для гребня или подошвы до крутонаклонного на ее скатах, причем, основной составляющей принимаемого полигармонического сигнала является сигнал зеркального отражения от горизонтальных участков поверхности 7. Предположим, что длина горизонтального участка взволнованной отражающей границы раздела «вода-воздух» - гребня или подошвы гравитационной волны – приблизительно составляет 













на спектральной составляющей 405 кГц наиболее оптимально можно регистрировать параметры морского волнения с длинами волн от 3 метров и более (точность отображения взволнованной границы раздела «вода-воздух» ~0,53°); на спектральной частоте 270 кГц наиболее оптимально можно регистрировать параметры морского волнения с длинами волн от 4,5 метров и более (точность отображения взволнованной границы раздела «вода-воздух» ~0,6°); на спектральной частоте 135 кГц наиболее оптимально можно регистрировать параметры морского волнения с длинами волн от 8,9 метров и более (точность отображения взволнованной границы раздела «вода-воздух» ~0,9° ) и т.д.
Таким образом, устройство в режиме волнографа позволяет получать достоверную информацию о параметрах морского волнения в значительном диапазоне изменения их величин за счет оптимизации характеристик зондирующего ультразвукового поля, в соответствии с изменяющимися параметрами морского волнения, в частности, регулируя как угловую ширину основного лепестка ХН, так и величину помехоустойчивости ЭАП 4, являющегося элементом донного ПАУ 5, обеспечивая повышение точности и приводя к регистрации уточненных данных.
Обнаруженное генеральное направление распространения поверхностной ветровой волны позволяет получить дополнительные сведения о характеристиках взволнованной поверхности за счет использования резонансного ультразвукового рассеяния, в частности, модернизированный режим волнографа обеспечивает наклонное ультразвуковое облучение с частотами
Известен расчет конструкции ПАУ 5 для случая использования в качестве излучающих элементов круглых плоских поршневых ЭАП 4 (см. V.Y.Voloshchenko. “Seadrome: Increasing the safety of takeoff and landing operations in the seaplane basin”, Russian Aeronautics (Iz VUZ), 59(2), 271-276, DOI 10.3103/S1068799816020197,http://link.springer.com/article/10.3103/S1068799816020197 ,2016). Угловая ширина основного лепестка 















По команде оператора (или автоматической системы принятия решений) 28 с дополнительных выходов блока управления и настройки 20 поступают импульсы на управляющие входы как резонансных усилителей 8 («запирают» на время излучения и ожидания прихода эхосигнала от границы раздела), так и генератора 1, вырабатывающего радиоимпульс 

где 


Пример 4.
С целью оценки возможностей применения ЭАП 4/ из выбранного кольцевого ряда ПАУ 5, для исследования «резонансного» механизма рассеяния были проведены эксперименты в гидроакустическом бассейне, координатное устройство которого позволяло в вертикальной плоскости изменять угол визирования 




На фиг.7 представлена расчетная зависимость добротности Q образцов поверхности синусоидального профиля (кривая 1 - 





Вышеизложенное позволяет давать практические рекомендации по выбору длины волны 
Заявляемые способ и устройство могут найти широкое применение в области гидроакустики для измерения параметров волнения моря (высоты, периода, длины и направления распространения волны) с высокой точностью в значительном диапазоне изменения их величин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустический способ измерения параметров движения слоистой морской среды | 2022 |
|
RU2801053C1 |
| Акустический способ для исследования поля скорости течений и морского волнения на прибрежной акватории | 2024 |
|
RU2840135C1 |
| Акустический способ измерения параметров движения слоистой морской среды на прибрежной акватории | 2023 |
|
RU2833473C1 |
| СПОСОБ ПРОВОДКИ БЕСПИЛОТНОГО ГИДРОСАМОЛЁТА НА АКВАТОРИИ ЛЁТНОГО БАССЕЙНА | 2018 |
|
RU2705475C1 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
| СПОСОБ ПОДГОТОВКИ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2011 |
|
RU2464205C1 |
| МНОГОЧАСТОТНЫЙ КОРРЕЛЯЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЙ | 2022 |
|
RU2795577C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
| Корреляционный способ измерения параметров тонкой структуры водной среды | 2022 |
|
RU2799974C1 |
| Многочастотный доплеровский способ измерений скорости течений в водной среде | 2022 |
|
RU2795579C1 |
Изобретение относится к области гидроакустики, в частности к акустическим способам и приборам для измерения и регистрации параметров морского волнения методом импульсной эхолокации полигармоническим ультразвуковым сигналом, излучаемым со стороны дна к границе раздела «вода - воздух». Изобретение может быть применено для измерения параметров волнения моря (высоты, периода, длины и направления распространения волны) с высокой точностью в значительном диапазоне изменения их величин. Технический результат изобретения заключается в повышении точности измерения параметров волнения моря (высоты, периода, длины, направления и скорости распространения ветровой волны) в значительном диапазоне изменения их величин. Поставленная задача решается устройством для реализации способа измерения параметров морского волнения, которое содержит береговую аппаратуру, ПАУ, полусферическая поверхность которого состоит из апертур  одинаковых ЭАП, образующих упорядоченную систему параллелей и меридианов, при этом расположенное в водной среде на донной поверхности акватории и ориентированное заданным образом относительно сторон света, ЭАП соединены через многоканальный управляемый коммутатор с береговой аппаратурой, состоящей из излучающего тракта, включающего генератор, усилитель мощности и приемный тракт, содержащий каналы обработки доплеровской информации для поиска генерального направления распространения поверхностной ветровой волны и измерений параметров морского волнения в режимах нормального (наклонного) облучения участка границы раздела «вода - воздух». 2 н. и 4 з.п. ф-лы, 7 ил.
одинаковых ЭАП, образующих упорядоченную систему параллелей и меридианов, при этом расположенное в водной среде на донной поверхности акватории и ориентированное заданным образом относительно сторон света, ЭАП соединены через многоканальный управляемый коммутатор с береговой аппаратурой, состоящей из излучающего тракта, включающего генератор, усилитель мощности и приемный тракт, содержащий каналы обработки доплеровской информации для поиска генерального направления распространения поверхностной ветровой волны и измерений параметров морского волнения в режимах нормального (наклонного) облучения участка границы раздела «вода - воздух». 2 н. и 4 з.п. ф-лы, 7 ил.
1. Акустический способ измерения параметров морского волнения, включающий
размещение на донной поверхности акватории приемоизлучающего антенного устройства полусферической формы, которые выполнено из 
выбор для проведения измерений параметров морского волнения верхнего электроакустического преобразователя, входящего в состав приемоизлучающего антенного устройства полусферической формы, акустическая ось которого совпадает с вертикалью, обеспечивающего излучение снизу вверх по нормали к выбранному участку границы раздела «вода - воздух», для чего последний соединен кабелем с аппаратурой,
генерирование с помощью излучающего тракта аппаратуры электрических колебаний и их кодирование путем преобразования в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму кратковременных импульсов прямоугольной формы с малым временем нарастания фронта, а посылка содержит в себе несущие колебания с частотой 
преобразование кодированных электрических колебаний с помощью верхнего электроакустического преобразователя приемоизлучающего антенного устройства в кратковременные периодические посылки ультразвуковых волн с необходимой длительностью, распространяемых в направлении выбранного участка контролируемой границы раздела «вода - воздух»,
формирование в гидроакустическом канале параметрической излучающей антенны, в объеме которой распределены нелинейные источники формирующихся спектральных компонент, в результате чего генерируются низкочастотные (самодемодуляция) и высокочастотные (самовоздействие) ультразвуковые сигналы,
установление акустического контакта с выбранным участком границы раздела «вода - воздух» для отражения посылок ультразвуковых волн,
получение за счет отражения составляющих полигармонического сигнала амплитудной информации об облучаемом выбранном участке границы раздела на каждой спектральной компоненте,
прием и преобразование с помощью верхнего электроакустического преобразователя приемоизлучающего антенного устройства отраженных ультразвуковых волн в электрические сигналы,
осуществление в 
подбор регистрируемых спектральных составляющих эхосигналов и вариантов обработки в
регулировку точности измерения на выбранном участке границы раздела «вода - воздух» величин ординат ветровой волны за счет изменения разрешающей способности как в вертикальном (длительность зондирующего импульса), так и горизонтальном (угловая ширина по уровню 0,7 основного лепестка ХН) направлениях,
выделение полезного информационного сигнала в приемном тракте аппаратуры, полученного при отражении только от выбранного и облучаемого участка границы раздела «вода - воздух»;
восстановление функции движения и получение совокупности параметров, характеризующих пространственное положение контролируемого при использовании
отображение, регистрация и документирование результатов измерений в аппаратуре,
отличающийся тем, что в него введены
выбор двух электроакустических преобразователей, расположенных на пересечениях заданной параллели и осевого меридиана полусферической поверхности отдельного донного приемоизлучающего антенного устройства, при этом акустические оси обоих электроакустических преобразователей имеют одинаковые углы наклона 
генерирование с помощью излучающего тракта аппаратуры электрических несущих колебаний с частотой
синхронное преобразование электрических колебаний с помощью двух электроакустических преобразователей в импульсный режим излучения ультразвуковых волн, которые распространяются в направлении двух выбранных участков границы раздела «вода - воздух», формируя в водной среде две параметрические излучающие антенны, в объемах которых распределены нелинейные источники генерируемых спектральных компонент (самовоздействие),
генерирование двух полигармонических пучков ультразвуковых сигналов с частотами 

установление акустических контактов при облучении двух участков взволнованной границы раздела «вода - воздух», в пределах которых распространяется с горизонтальной скоростью 
преобразование с помощью
двух электроакустических преобразователей приемоизлучающего антенного устройства отраженных ультразвуковых волн в электрические сигналы, частоты которых согласно двойному эффекту Доплера изменены на величину сдвига частоты, причем для первого участка частота повышена, а для второго – уменьшена,
осуществление в канале выделения доплеровских частот и вторичной обработки доплеровской информации приемного тракта аппаратуры алгебраического суммирования частот сигналов, принятых двумя электроакустическими преобразователями приемоизлучающего антенного устройства, для каждой гармоники с частотами
преобразование полученной информации в код индикаторных элементов и сопряжение с внешними регистрирующими устройствами с последующим отображением, регистрацией и документированием результатов измерений в аппаратуре,
выбор следующей пары электроакустических преобразователей, смещенных относительно исходно выбранной пары, которые также расположены на пересечениях той же заданной параллели и следующего меридиана полусферической поверхности донного приемоизлучающего антенного устройства, при этом акустические оси данной пары ЭАП имеют те же одинаковые углы наклона
последовательное выполнение операций, осуществляемых до тех пор, пока в канале выделения доплеровских частот и вторичной обработки доплеровской информации приемного тракта аппаратуры измеряемое значение доплеровской частоты для ультразвуковых сигналов, отраженных от двух облучаемых участков взволнованной границы раздела «вода - воздух», не достигнет максимального значения, что осуществляется при нахождении вектора горизонтальной скорости
осуществление в канале выделения доплеровских частот и вторичной обработки доплеровской информации приемного тракта аппаратуры перехода от значения полученной максимальной доплеровской частоты к значению горизонтальной скорости
выбор необходимой скоростной чувствительности канала выделения доплеровских частот и вторичной обработки доплеровской информации на гармониках с частотами
осуществление облучения взволнованной поверхности границы раздела «вода - воздух» для найденного генерального направления распространения поверхностной ветровой волны под фиксированным углом
осуществление облучения взволнованной поверхности границы раздела «вода - воздух» для найденного генерального направления распространения поверхностной ветровой волны при изменении угла
2. Устройство для реализации способа по п.1, содержащее приемоизлучающее антенное устройство, расположенное в водной среде на донной поверхности акватории и ориентированное заданным образом относительно сторон света, полусферическая поверхность которого состоит из апертур одинаковых электроакустических преобразователей, образующих упорядоченную систему параллелей и меридианов, причем электроакустические преобразователи соединены через многоканальный управляемый коммутатор с береговой аппаратурой,
береговую аппаратуру, состоящую из излучающего тракта, включающего генератор и усилитель мощности, и приемного тракта, включающего каналы обработки доплеровской информации для поиска генерального направления распространения поверхностной ветровой волны, так и каналы измерений параметров морского волнения в режимах нормального и наклонного облучения участка границы раздела «вода - воздух»,
канал обработки доплеровской информации, содержащий два электроакустических преобразователя, расположенных на пересечениях заданной параллели и осевого меридиана полусферической поверхности донного приемоизлучающего антенного устройства, акустические оси обоих электроакустических преобразователей имеют одинаковые углы наклона относительно горизонта и находятся в одной вертикальной плоскости, проходящей через ось симметрии донного приемоизлучающего антенного устройства, причем оба электроакустических преобразователя выполнены с возможностью изменения расположения на заданной параллели по команде оператора либо автоматической системы принятия решений через блок управления и настройки, оставаясь соединенными через многоканальный управляемый коммутатор как с излучающим трактом, так и с  входами резонансных усилителей, настроенных на частоты ,
входами резонансных усилителей, настроенных на частоты ,  , выходы которых соединены с двумя входами
, выходы которых соединены с двумя входами  частотных дискриминаторов с возможностью подачи на частотные дискриминаторы электрических сигналов парами как одного частотного диапазона, так и доплеровского сдвига (но с разными знаками – «+» и «-»), а выходы частотных дискриминаторов и резонансных усилителей, настроенных на частоты , , соединены со входами блока вторичной обработки доплеровской информации, выход которого соединен со входами цифрового табло и самописца,
частотных дискриминаторов с возможностью подачи на частотные дискриминаторы электрических сигналов парами как одного частотного диапазона, так и доплеровского сдвига (но с разными знаками – «+» и «-»), а выходы частотных дискриминаторов и резонансных усилителей, настроенных на частоты , , соединены со входами блока вторичной обработки доплеровской информации, выход которого соединен со входами цифрового табло и самописца,
канал измерений параметров морского волнения, содержащий электроакустический преобразователь приемоизлучающего антенного устройства, акустическая ось которого расположена вертикально, выход электроакустического преобразователя соединен через многоканальный управляемый коммутатор со входами  параллельно включенных цепочек (где
параллельно включенных цепочек (где  =1,2,3,
=1,2,3,  , и
, и  =1,2,3,
=1,2,3,  , - целые числа) из последовательно соединенных резонансных усилителей, настроенных на частоты
, - целые числа) из последовательно соединенных резонансных усилителей, настроенных на частоты  и
и 
 , амплитудных детекторов и аттенюаторов с регулируемыми коэффициентами передачи с соответствующими сигнальными
, амплитудных детекторов и аттенюаторов с регулируемыми коэффициентами передачи с соответствующими сигнальными  -входами перемножителя, выход перемножителя через пороговое устройство и счетчик импульсов соединен со входом запоминающего регистра ЭВМ, выход которого соединен как с входом цифрового табло, так и через цифроаналоговый преобразователь со входами самописца и интегратора, а второй вход счетчика импульсов соединен с выходом тактового генератора,
-входами перемножителя, выход перемножителя через пороговое устройство и счетчик импульсов соединен со входом запоминающего регистра ЭВМ, выход которого соединен как с входом цифрового табло, так и через цифроаналоговый преобразователь со входами самописца и интегратора, а второй вход счетчика импульсов соединен с выходом тактового генератора,
канал измерений параметров морского волнения, содержащий электроакустический преобразователь приемоизлучающего антенного устройства, акустическая ось которого расположена под углом относительно горизонта, выход электроакустического преобразователя соединен через многоканальный управляемый коммутатор со входами параллельно включенных цепочек (где =1,2,3, , и =1,2,3, , - целые числа) из последовательно соединенных резонансных усилителей, настроенных на частоты и , амплитудных детекторов и аттенюаторов с регулируемыми коэффициентами передачи с соответствующими сигнальными -входами аналогового ключа, выход которого соединен со входом индикатора.
3. Устройство по п.2, отличающееся тем, что оно выполнено с обеспечением возможности наклонного ультразвукового облучения с частотами и взволнованной поверхности границы раздела «вода - воздух» как при неизменном угле относительно горизонта, так и при изменении угла относительно горизонта.
4. Устройство по п.2, отличающееся тем, что управляющие входы генератора, многоканального управляемого коммутатора, всех аттенюаторов, резонансных усилителей, настроенных на соответствующую спектральную составляющую  и
и 
 , тактового генератора, цифрового табло, самописца, интегратора, блока вторичной обработки доплеровской информации, аналогового ключа и индикатора соединены с соответствующими выходами блока управления и настройки, а совместное функционирование блоков и выбор варианта наклонного облучения осуществляется по командам оператора или автоматической системы принятия решений через блок управления и настройки.
, тактового генератора, цифрового табло, самописца, интегратора, блока вторичной обработки доплеровской информации, аналогового ключа и индикатора соединены с соответствующими выходами блока управления и настройки, а совместное функционирование блоков и выбор варианта наклонного облучения осуществляется по командам оператора или автоматической системы принятия решений через блок управления и настройки.
5. Устройство по п.2, отличающееся тем, что блок управления и настройки выполнен с возможностью обеспечения совместного функционирования каналов и выбора варианта облучения.
6. Устройство по п.2, отличающееся тем, что каждый электроакустический преобразователь содержит пьезоэлемент и элементы экранировки, гидро-, электро- и шумоизоляции.
| СРЕДСТВО ДЛЯ ОТПУГИВАНИЯ ГРЫЗУНОВ | 0 |
|
SU168083A1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВЗВОЛНОВАННОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2466425C1 |
| Ю.А | |||
| Титченко, В.Ю | |||
| Караев | |||
| Метод определения параметров морского волнения с помощью модифицированного акустического волнографа | |||
| Известия вузов | |||
| Радиофизика | |||
| Том LV, номер 8, 2012, стр | |||
| Стрелочный замыкатель | 1922 |
|
SU544A1 |
| АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫМОРСКИХ ВОЛН | 1971 |
|
SU412578A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ | 1990 |
|
RU2018875C1 |
| Устройство для определения процентного соотношения минералов, содержащихся в горных породах | 1954 |
|
SU104732A1 |
| ГИДРОАКУСТИЧЕСКИЙ АВТОНОМНЫЙ ВОЛНОГРАФ | 2011 |
|
RU2484428C2 |

