00
|
о



| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ МАТЕРИАЛА ИСПЫТЫВАЕМОГО ОБЪЕКТА С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ ВОЛН | 2008 |
|
RU2423690C1 |
| ОПТИКО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЛАЗЕРНО-УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 2022 |
|
RU2793566C1 |
| Способ исследования соединений с натягом с применением ультразвуковой томографии | 2018 |
|
RU2719276C1 |
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ СОЕДИНЕНИЙ ТРУБ МАЛОГО ДИАМЕТРА | 2009 |
|
RU2394235C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ТРЕХМЕРНОГО ИЗДЕЛИЯ | 2013 |
|
RU2532597C1 |
| Способ ультразвукового контроля изделий | 2016 |
|
RU2622459C1 |
| Способ получения радиолокационного изображения и геометрии поверхности рельсового полотна | 2018 |
|
RU2683120C1 |
| Способ ультразвукового контроля конических резьбовых соединений с упорными уступами | 1991 |
|
SU1792530A3 |
| Способ контроля качества продольных сварных швов зубчатых колес | 2022 |
|
RU2785087C1 |

Изобретение относится к измерительной технике, а именно к технике неразрушающих испытаний ультразвуковыми методами, и может быть использовано для контроля качества материалов и изделий, преимущественно крупногабаритных и с большим затуханием ультразвука. Цель изобретения - повышение надежности передающего тракта ультразвукового дефектоскопа за счет повышения его экономичности. Передающий тракт содержит генератор 1 синусо- идального сигнала, формирователь 2 прямоугольных импульсов, формирователь 3 псевдослучайной кодовой последовательности, формирователь 4 периода, .электронный ключ 5, балансный модулятор 6, усилитель 7 мощности, излучающий электронно-акустический преобразователь 8, блок 9 питания, снабженный кабельным усилителем 10, последовательно соединенными формирователем 11 управляющего сигнала и модулятором 12. Передающий тракт позволяет подавать импульс но напряжение питания на усилитель 7 мощности только в моменты излучения зондирующего сигнала, повы- с,ить КПД усилителя 7 мощности, уменьшить потери энергии в соединительном кабеле, пропорциональные квадрату амплитуды напряжения передаваемого по нему сигнала, повысить экономичность передающего тракта в целом, а значит улучшить эксплуатационные характеристики. 1 з.п.ф-лы,3 ил.
00
Изобретение относится к технике неразрушающих испытаний и может быть использовано в различных областях машиностроения для контроля качества материалов и изделий, преимущественно, крупногабаритных и с большим затуханием ультразвука.
Цель изобретения - улучшение эксплуатационных характеристик передающего тракта ультразвукового дефектоскопа за счет повышения его экономичности и надежности.
На фиг.1 представлена структурная схема передающего тракта ультразвукового дефектоскопа; на фиг.2 - структурная схема формирователя управляющего сигнала; на фиг.З приведены эпюры напряжений в характерных точках структурной схемы передающего тракта ультразвукового дефектоскопа.
Передающий тракт ультразвукового дефектоскопа содержит последовательно соединенные генератор 1 синусоидального сигнала, формирователь 2 прямоугольных импульсов, формирователь 3 псевдослучайной кодовой последовательности, формирователь 4 периода и электронный ключ 5, балансный модулятор 6. первым входом подключенный к выходу генератора 1 синусоидального сигнала, вторым - к второму выходу формирователя 3 псевдослучайной кодовой последовательности, а выходом - к второму входу электронного ключа 5, последовательно соединенные усилитель 7 мощности и излучающий электроакустический преобразователь 8 и блок 9 питания, ка- бельный усилитель 10, включенный между выходом электронного ключа 5 и входом усилителя 7 мощности, последовательно соединенные формирователь 11 управляющего сигнала и модулятор 12, вход формирователя 11 управляющего сигнала соединен с выходом формирователя 4 периода, второй вход модулятора 12 соединен с выходом блока 9 питания, а выход - с вторым входом усилителя 7 мощности, причем последний конструктивно объединен в одном корпусе с излучающим электроакустическим преобразователем 8, а второй вход усилителя 7 мощности предназначен для подачи напряжения питания. Формирователь 11 управляющего сигнала выполнен из последовательно соединенных одновибрз- тора 13, RS-триггера 14 и интегратора 15, причем второй вход RS-триггера объединен с входом одновибратора 13.
Предлагаемый тракт работает следующим образом. Генератор синусоидального сигнала вырабатывает гармонические колебания, поступающие на вход балансного модулятора 6 и формирователя 2 прямоугольных импульсов. Последовательность импульсов с выхода последнего инициирует работу формирователя 3 псевдослучайной
кодовой последовательности, которая с выхода последнего подается на второй вход балансного модулятора 6 (см. фиг.За). Фазо- манипулированный псевдослучайный квазинепрерывный сигнал (см.фиг.Зб) с выхода
0 балансного модулятора 6 подается на второй вход электронного ключа 5, на первый вход которого поступает управляющий видеоимпульсный сигнал (см, фиг.Зв), формирующий на выходе электронного ключа 5
5 последовательность радиоимпульсов с фа- зоманипулированной несущей (см. фиг.Зг). Через кабельный усилитель 10 последние по соединительному кабелю подаются на вход усилителя 7 мощности, конструктивно
0 расположенного в одном корпусе с излучающим электроакустическим преобразователем 8. Одновибратор.13 формирователя 11 управляющего сигнала запускается задним фронтом импульса, вырабатываемого фор5 мирователем 4 периода и обеспечивает выдержку Тв Тп - Ти - Тф (где Тп и Ти соответственно, период повторения и длительность зондирующего сигнала, а Тф - длительность фронта импульса на выходе
0 формирователя 11 управляющего сигнала) (см. фиг.Зд).
Задним фронтом импульса одновибратора 13 RS-триггер 14 устанавливается в единичное состояние, а передним фронтом
5 импульса формирователя 4 периода, поступающего на R-вход, RS-т риггер устанавливается в исходное нулевое состояние (см. фиг.З), Далее импульс поступает на вход интегратора 15, который увеличивает длитель0 ность его фронтов до величины Тф, выбираемой из условия Тф « 1/FH (где FH - значение частоты колебаний на выходе генератора 1 синусоидального сигнала), например, на порядок (см.фиг.Зж).
5 Необходимость соблюдения этого условия продиктована тем, что в спектре сигналов, вызванных этим переходным процессом в момент включения и выключения напряжения питания усилителя 7 мощности, не
0 должно содержаться спектральных составляющих, попадающих в диапазон частот зондирующего сигнала и выступающих в роли помехи. Значение Тф устанавливается за счет подбора величины постоянной интег5 рирования, Импульс с выхода формирователя 1 управляющего сигнала поступает на вход модулятора 12, который в соответствии с формой управляющего сигнала подает напряжение пита.ния по отдельной линии связи на усилитель 7 мощности. Применение
импульсного питания позволяет конструктивно упростить усилитель 7 мощности и выполнить его, например, на базе каскада с общим эмиттером. Причем импульсное питание не снижает мощности зондирующего сигнала, а лишь позволяет ликвидировать непроизводительные потери энергии источника питания в паузах между импульсами зондирования (за счет отключения напряже- н ия питания усилителя мощности), так и во время излучения зондирующего сигнала (за счет исключения перезаряда электрической емкости соединительного кабеля).
В качестве модулятора 12 может быть использована, например, схема общеизвестного мощного эмиттерного повторителя. Вариант кабельного усилителя 10 описан в (Горошков Б.И. Радиоэлектронные устройства. -М.; РиС, 1984. - с.136).
Использование новых элементов - кабельного усилителя, формирователя управляющего напряжения и модулятора, а также конструктивное объединение в одном корпусе излучающего электроакустического преобразователя и усилителя мощности с использованием корпуса в качестве радиатора выгодно отличает предлагаемый передающий, тракт ультразвукового дефектоскопа от указанного прототипа, так как позволяет упростить усилитель мощности, повысить его экономичность и понизить уровень требований, предъявляемых к источнику питания, что, . в свою очередь увеличивает надежность ультразвукового неразрушающего контроля в целом и расширяет сферу применения ультразвуковой дефектоскопии.
Формулаизобретения:
кодовой последовательности, а выходом - к второму входу электронного ключа, последовательно соединенные усилитель мощности и излучающий электроакустический преобразователь и блок питания, о т л и ч аю щи и с я тем, что, с целью повышения надежности передающего тракта ультразвукового дефектоскопа, он снабжен кабельным усилителем, включенным между выходом электронного ключа и входом усилителя мощности, последовательно, соединенными формирователем управляющего сигнала и модулятором, входформировате- ля управляющего сигнала соединен с выходом формирователя периода, второй
вход модулятора соедине н с выходом блока питания, а выход-с вторым входом усилителя мощности, последний расположен в одном корпусе с излучающим электроакустическим преобразователем, а второй
вход усилителя мощности предназначен для подключения к источнику напряжения питания..
2,Тракт дефектоскопа по п.1, о т л и ч а- ю щ и и с я тем, что формирователь управляющего сигнала выполнен из последовательно соединенных одновибратора, RS-триггера и интегратора, а второй вход RS-триггера объединен с входом одновибратора.
Фиг.2
ФИГ. 3
Составитель И. Соколов Техред М.Моргентал
Корректор О, Густи
Редактор Т. Шагова
Заказ 1719Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
Корректор О, Густи
ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕ ВЕДОМСТВО СССР (ГОСПАТЕНТ СССР)
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
1
(21)4848828/28
(22)22.05.90 (46)23.05.93. Бюл. № 19
(71) Ленинградский электротехнический институт им. В.И. Ленина
(72) А.В. Осетров и А.А. Туржинский (56) Качанов Е.И., Пигулевский Е.Д. и Ярачин Е.М. Методы и средства гидроакустической голографии. -Л.: Судостроение, 1989, с.68- 70.
Ganapathy S., Schmult В., Wu W,S. Analysis and design considerations for a real- time system for non-destructive evaluation ;ln the nuclear industry//Veltrasonics. - 1982 - v.20 - № 6 - p.249-256.
Thomson R.N. Transverse and longitudinal resoluton of the synthetic aperture focusing technique//Ultrasontcs. - 1984-v.22-NH-p.9-15,
Thompson D.O., Wormley S.T. Log and intermeadlate wavelenght flaw reconstruction/In: Review of Progress in Quantitative NDE, 4A, By Thompson D.O. and Chimenl D.E. End,, New York, Plenum, 1985, p.287-296.
Donald 0., Thompson D.O., Wormley ST., Reliability of reconstruction of arbitrarily oriented flaws using multfview transducers/ЛЁЕЕ Trans. Ultras.. Ferroelec. and Freq. Contr, - 1987 - v.34 - № 5 - p.508-514.
KO P H. Г и Корн Т, Справочник по математике для научных работников и инженеров. -М.: Наука, 1984, с.450,
Гидроакустические навигационные средства. -Л.: Судостроение, 1983, с.6-9.
Изобретение относится к акустическим
измерениям и может быть использовано для
проведения ультразвукового томографиче 00ШШ
щтз-шштм
ИЪПИОТЕЯА
(54) СПОСОБ УЛЬТРАЗВУКОВОГО ТОМОГ- РАФИЧЕСКОГО КОНТРОЛЯ ИЗДЕЛИЙ (57) Изобретение относится к акустическим измерениям и может быть использовано для контроля путем получения ультразвукового томографического изображения внутренней структуры исследуемого объекта. Целью изобретения является повышение скорости и информативности контроля. Сканирование осуществляют системой из трех жестко соединенных между собой ультразвуковых преобразователей, последовательно измеряют каждым преобразователем в каждом положении системы и направленные аку- .стические импульсы, принимают не менее чем одним преобразователем отраженные акустические импульсы, по которым восстанавливают топографическое изображение дефекта. 7 ил.
00
о
ю
ского контроля изделий. Область применения данного способа - акустическая интро- скопия и промышленный неразрушающий
контроль изделий. Технической задачей, решаемой изобретением, является разработка способа ультразвукового томографического контроля изделий, который обеспечивает надежную идентификацию дефектов в материале контролируемого изделия, в особенности дефектов больши х волновых размеров, при этом обеспечивается повышенная скорость и информативность контроля.
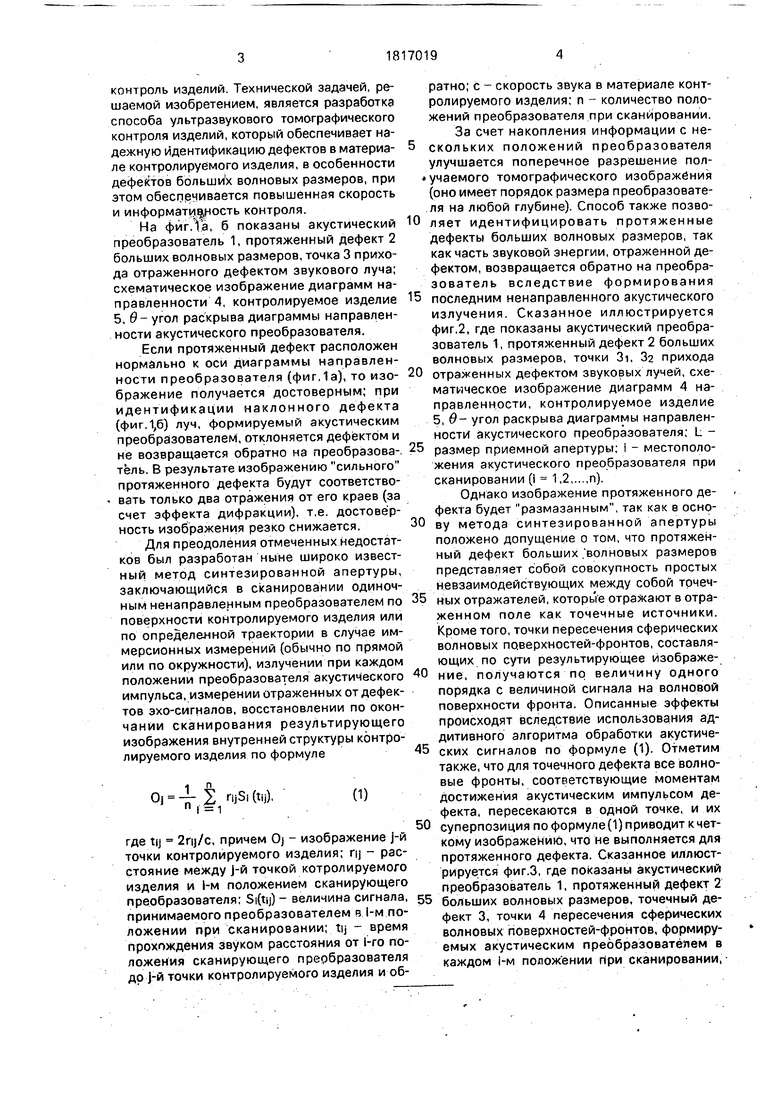
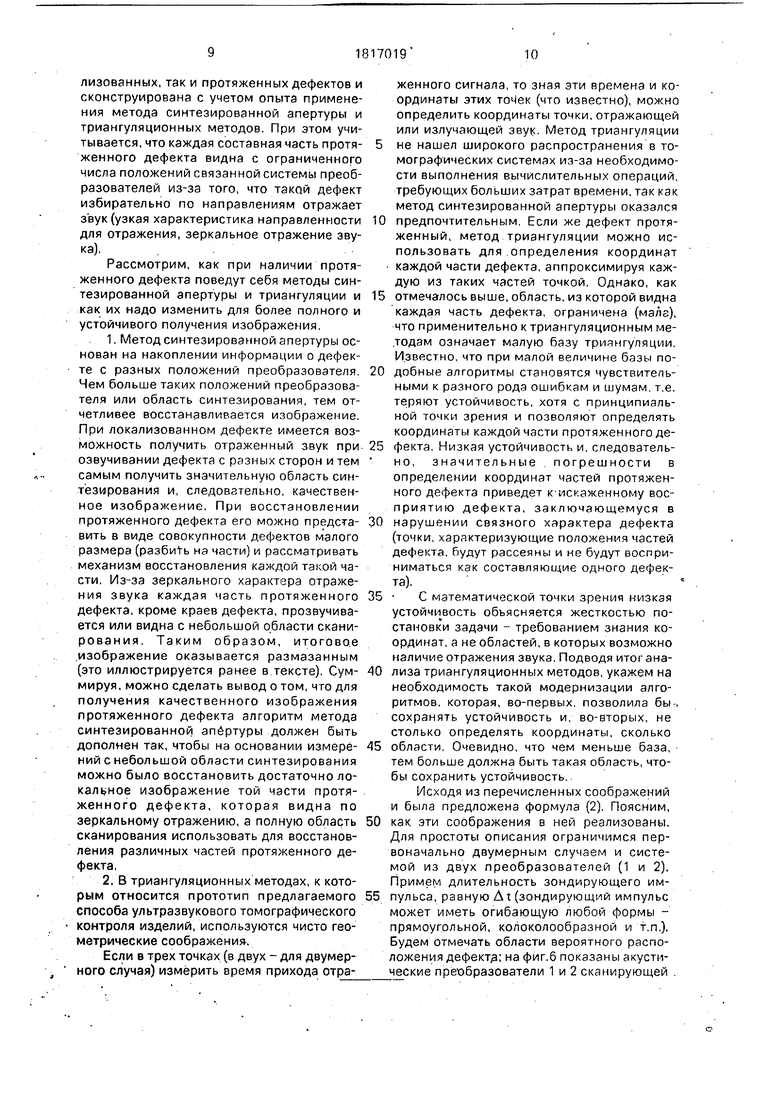
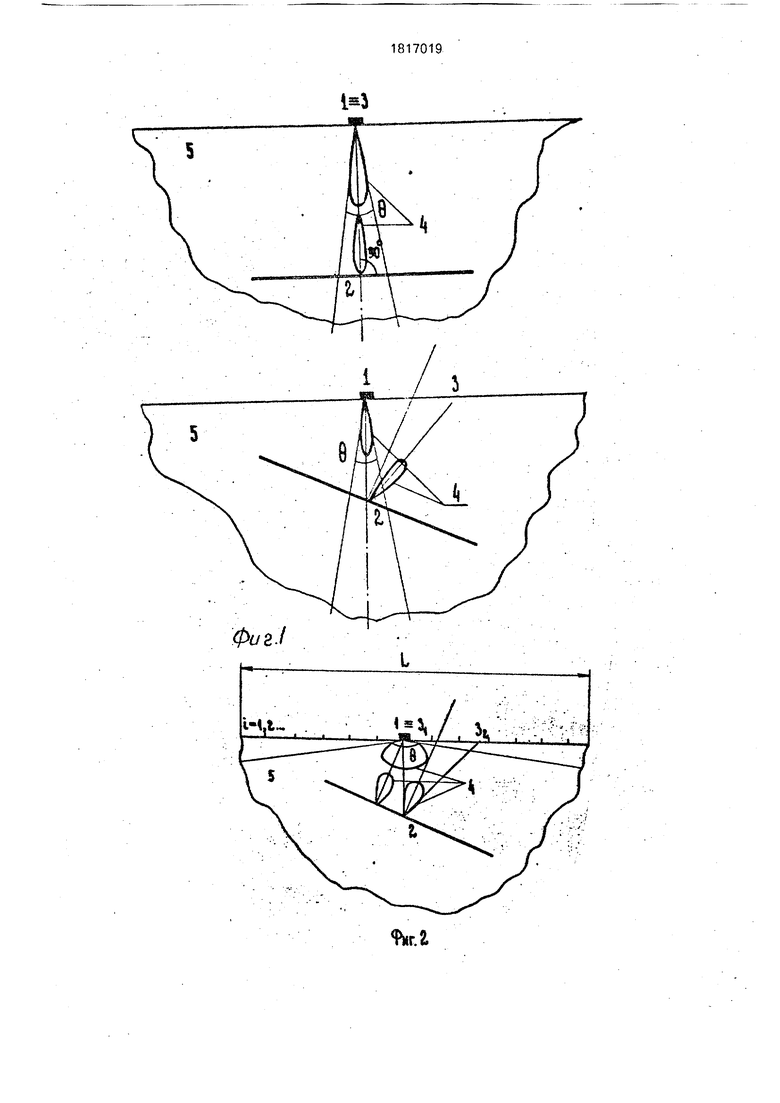
На фйгЛ а, б показаны акустический преобразователь 1, протяженный дефект 2 больших волновых размеров, точка 3 прихода отраженного дефектом звукового луча; схематическое изображение диаграмм направленности 4, контролируемое изделие 5, 9- угол раскрыва диаграммы направленности акустического преобразователя.
Если протяженный дефект расположен нормально к оси диаграммы направленности преобразователя (фиг,1а), то изображение получается достоверным; при идентификации наклонного дефекта (фиг. 1,6) луч, формируемый акустическим преобразователем, отклоняется дефектом и не возвращается обратно на преобразова-. тёль. В результате изображению сильного протяженного дефекта будут соответствовать только два отражения от его краев (за счет эффекта дифракции), т.е. достоверность изображения резко снижается.
Для преодоления отмеченных недостатков был разработан ныне широко известный метод синтезированной апертуры, заключающийся в сканировании одиночным ненаправленным преобразователем по поверхности контролируемого изделия или по определенной траектории в случае иммерсионных измерений (обычно по прямой или по окружности), излучении при каждом положении преобразователя акустического импульса, измерении отраженных от дефектов эхо-сигналов, восстановлении по окончании сканирования результирующего изображения внутренней структуры контролируемого изделия по формуле
Oj
.N.
где tij 2nj/c, причем Oj - изображение j-й точки контролируемого изделия; щ - расстояние между j-й точкой котролируемого изделия и i-м положением сканирующего преобразователя; Si(tjj) - величина сигнала, принимаемого преобразователем в i-м положении при сканировании; tij - время прохождения звуком расстояния от 1-го положения сканирующего прербразователя до j-й точки контролируемого изделия и обратно; с - скорость звука в материале контролируемого изделия; п - количество положений преобразователя при сканировании. За счет накопления информации с нескольких положений преобразователя улучшается поперечное разрешение пол- «учаемого томографического изображения (оно имеет порядок размера преобразователя на любой глубине). Способ также позволяет идентифицировать протяженные дефекты больших волновых размеров, так как часть звуковой энергии, отраженной дефектом, возвращается обратно на преобразователь вследствие формирования
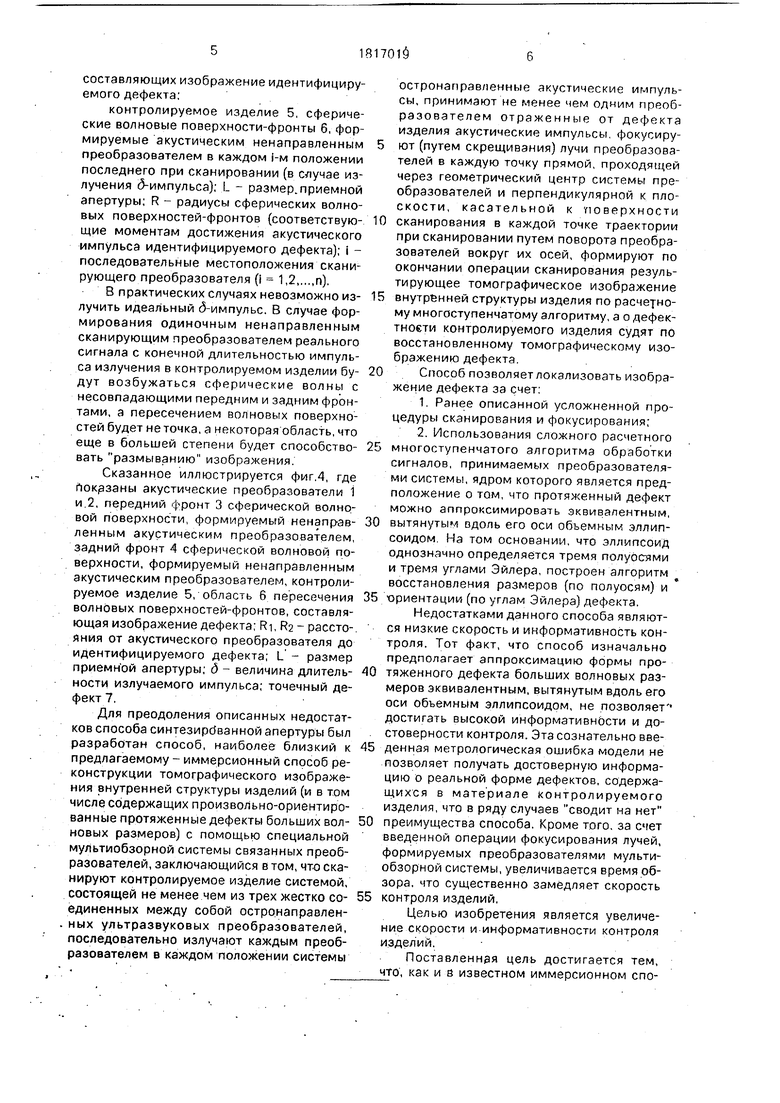
последним ненаправленного акустического излучения. Сказанное иллюстрируется фиг.2, где показаны акустический преобразователь 1, протяженный дефект 2 больших волновых размеров, точки 3i, За прихода
отраженных дефектом звуковых лучей, схематическое изображение диаграмм 4 направленности, контролируемое изделие 5, 0- угол раскрыва диаграммы направленности акустического преобразователя; L
размер приемной апертуры; i - местополо
жения акустического преобразователя при сканировании (i 1,2,...,п).
Однако изображение протяженного дефекта будет размазанным, так как в оснрВу метода синтезированной апертуры положено допущение о том, что протяженный дефект больших . волновых размеров представляет собой совокупность простых невзаимодействующих между собой трчечнгых отражателей, которые отражают в отраженном поле как точечные источники. Кроме того, точки пересечения сферических волновых поверхностей-фронтов, составляющих по сути результирующее изображение, получаются по величину одного
порядка с величиной сигнала на волновой поверхности фронта. Описанные эффекты происходят вследствие использования аддитивного алгоритма обработки акустиче45 ских сигналов по формуле (1). Отметим также, что для точечного дефекта все волновые фронты, соответствующие моментам достижения акустическим импульсом дефекта, пересекаются в одной точке, и их
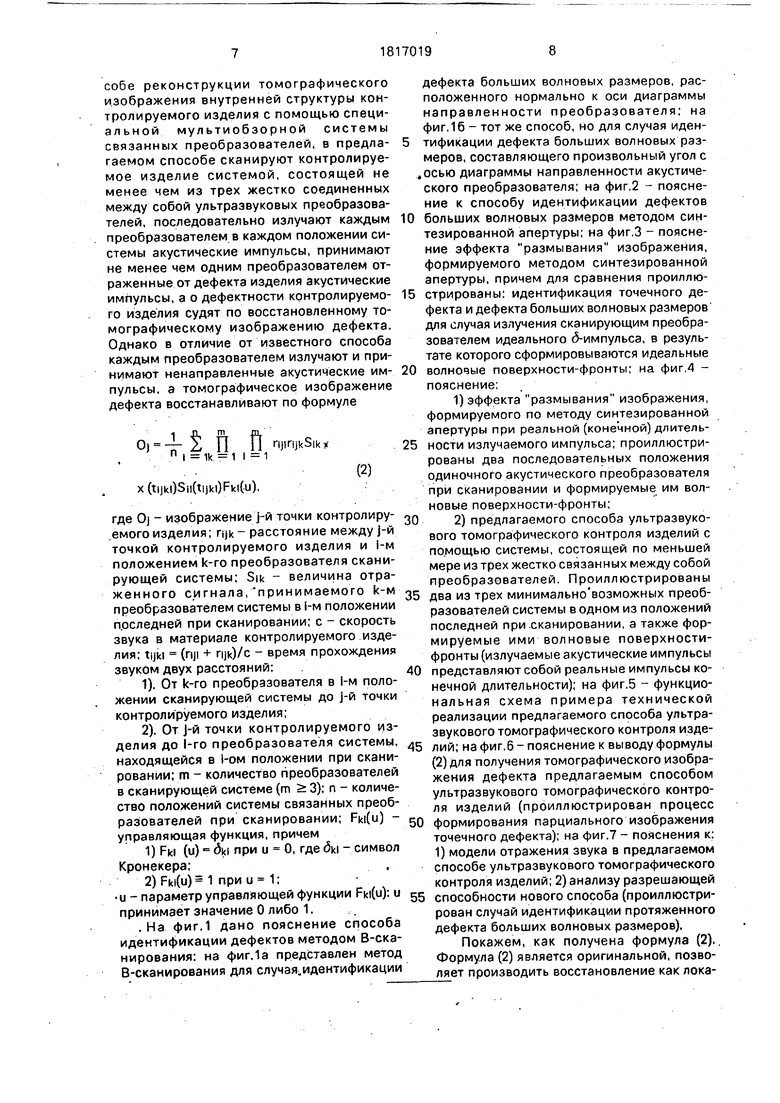
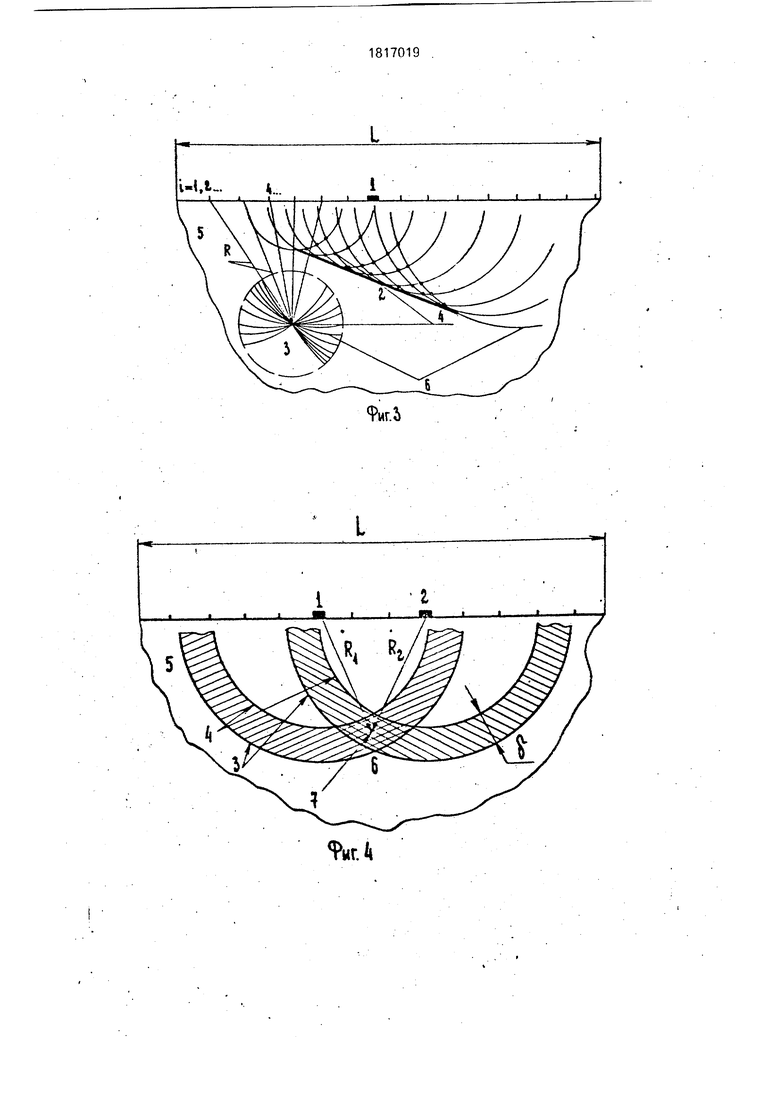
50 суперпозиция по формуле (1) приводит к четкому изображению, что не выполняется для протяженного дефекта. Сказанное иллюстрируется фиг.З, где показаны акустический преобразователь 1, протяженный дефект 2
55 больших волновых размеров, точечный дефект 3, точки 4 пересечения сферических волновых поверхностей-фронтов, формируемых акустическим преобразователем в каждом i-м положении при сканировании,составляющих изображение идентифицируемого дефекта;
контролируемое изделие 5, сферические волновые поверхности-фронты 6, формируемые акустическим ненаправленным преобразователем в каждом i-м положении последнего при сканировании (в случае излучения 3-импульса); L - размер.приемной апертуры; R - радиусы сферических волновых поверхностей-фронтов (соответствующие моментам достижения акустического импульса идентифицируемого дефекта); i - последовательные местоположения сканирующего преобразователя (i 1,2,.,.,п).
В практических случаях невозможно излучить идеальный (5-импульс. В случае формирования одиночным ненаправленным сканирующим преобразователем реального сигнала с конечной длительностью импульса излучения в контролируемом изделии будут возбужаться сферические волны с несовпадающими передним и задним фронтами, а пересечением волновых поверхностей будет не точка, а некоторая область, что еще в большей степени будет способствовать размыванию изображения.
Сказанное иллюстрируется фиг,4, где доказаны акустические преобразователи 1 и.2, передний фронт 3 сферической волновой поверхности, формируемый ненаправленным акустическим преобразователем, задний фронт 4 сферической волновой поверхности, формируемый ненаправленным акустическим преобразователем, контролируемое изделие 5, область 6 пересечения волновых поверхностей-фронтов, составляющая изображение дефекта; Ri, R2 - рассто-. яния от акустического преобразователя до идентифицируемого дефекта; L - размер приемной апертуры; д - величина длительности излучаемого импульса; точечный дефект 7.
Для преодоления описанных недостатков способа синтезированной апертуры был разработан способ, наиболее близкий к предлагаемому - иммерсионный способ реконструкции томографического изображения внутренней структуры изделий (и в том числе содержащих произвольно-ориентированные протяженные дефекты больших волновых размеров) с помощью специальной мультиобзорной системы связанных преобразователей, заключающийся в том, что сканируют контролируемое изделие системой, состоящей не менее чем из трех жестко соединенных между собой остронаправлен- ных ультразвуковых преобразователей, последовательно излучают каждым преобразователем в каждом положении системы
остронаправленные акустические импульсы, принимают не менее чем одним преобразователем отраженные от дефекта изделия акустические импульсы, фокусиру5 ют (путем скрещивания) лучи преобразователей в каждую точку прямой, проходящей через геометрический центр системы преобразователей и перпендикулярной к плоскости, касательной к поверхности
0 сканирования в каждой точке траектории при сканировании путем поворота преобразователей вокруг их осей, формируют по окончании операции сканирования результирующее томографическое изображение
5 внутренней структуры изделия по расчеуно- му многоступенчатому алгоритму, а о дефектности контролируемого изделия судят по восстановленному томографическому изображению дефекта.
0Способ позволяет локализовать изображение дефекта за счет:
5 многоступенчатого алгоритма обработки сигналов, принимаемых преобразователями системы, ядром которого является предположение о том, что протяженный дефект можно аппроксимировать эквивалентным,
0 вытянутым вдоль его оси объемным эллипсоидом. На том основании, что эллипсоид однозначно определяется тремя полуосями и тремя углами Эйлера, построен алгоритм восстановления размеров (по полуосям) и
5 ориентации (по углам Эйлера) дефекта.
Недостатками данного способа являются низкие скорость и информативность контроля. Тот факт, что способ изначально предполагает аппроксимацию формы про0 тяженного дефекта больших волновых размеров эквивалентным, вытянутым вдоль его оси объемным эллипсоидом, не позволяет достигать высокой информативности и до- . стоверности контроля. Эта сознательно вве5 денная метрологическая ошибка модели не позволяет получать достоверную информацию о реальной форме дефектов, содержащихся в материале контролируемого изделия, что в ряду случаев сводит на нет
0 преимущества способа. Кроме того, за счет введенной операции фокусирования лучей, формируемых преобразователями мультиобзорной системы, увеличивается время обзора, что существенно замедляет скорость
5 контроля изделий,
Целью изобретения является увеличение скорости и информативности контроля изделий.
Поставленная цель достигается тем, что, как и в известном иммерсионном способе реконструкции топографического изображения внутренней структуры контролируемого изделия с помощью специ- альной мультиобзорной системы связанных преобразователей, в предлагаемом способе сканируют контролируемое изделие системой, состоящей не менее чем из трех жестко соединенных между собой ультразвуковых преобразователей, последовательно излучают каждым преобразователем в каждом положении системы акустические импульсы, принимают не менее чем одним преобразователем отраженные от дефекта изделия акустические импульсы, а о дефектности контролируемого изделия судят по восстановленному то- мографическому изображению дефекта. Однако в отличие от известного способа каждым преобразователем излучают и принимают ненаправленные акустические импульсы, а томографическое изображение дефекта восстанавливают по формуле
Oj- Ј П ft njmjkSik
n i 1k. 1 I 1
x (tijki)Sn()Fkl(u).
где Oj - изображение j-й точки контролиру- .емого изделия; rjjk- расстояние между j-й точкой контролируемого изделия и i-м положением k-ro преобразователя сканирующей системы; Sik - величина отраженного сигнала, принимаемого k-м преобразователем системы в i-м положении последней при сканировании; с - скорость звука в материале контролируемого изделия; tijki (riji + Hjk)/c - время прохождения звуком двух расстояний:
1). От k-ro преобразователя в i-м положении сканирующей системы до j-й точки контролируемого изделия;
2). От j-й точки контролируемого изделия до 1-го преобразователя системы, находящейся в l-ом положении при сканировании; m - количество преобразователей в сканирующей системе (т 3); n - количество положений системы связанных преобразователей при сканировании; Fki(u) - управляющая функция, причем
1) Fki (u) 5ki при и 0, где дм - символ Кронекера;
2) Fki(u) 1 при и 1;
и - параметр управляющей функции Fki(u): u принимает значение 0 либо 1.
. На фиг.1 дано пояснение способа идентификации дефектов методом В-ска- нирования: на фиг.1 а представлен метод В-сканирования для случая.идентификации
дефекта больших волновых размеров, расположенного нормально к оси диаграммы направленности преобразователя; на фиг, 16 - тот же способ, но для случая иден5 тификации дефекта больших волновых размеров, составляющего произвольный угол с .осью диаграммы направленности акустического преобразователя; на фиг.2 - пояснение к способу идентификации дефектов
10 больших волновых размеров методом синтезированной апертуры; на фиг.З - пояснение эффекта размывания изображения, формируемого методом синтезированной апертуры, причем для сравнения проиллю15 стрированы; идентификация точечного дефекта и дефекта больших волновых размеров для случая излучения сканирующим преобразователем идеального (5-импульса, в результате которого сформировываются идеальные
20 волновые поверхности-фронты; на фиг.4 - пояснение;
1) эффекта размывания изображения, формируемого по методу синтезированной апертуры при реальной (конечной) длитель25 ности излучаемого импульса; проиллюстрированы два последовательных положения одиночного акустического преобразователя при сканировании и формируемые им волновые поверхности-фронты;
30 2) предлагаемого способа ультразвукового томографического контроля изделий с помощью системы, состоящей по меньшей мере из трех жестко связанных между собой преобразователей. Проиллюстрированы
35 два из трех минимально возможных преобразователей системы в одном из положений последней при .сканировании, а также формируемые ими волновые поверхности- фронты (излучаемые акустические импульсы
40 представляют собой реальные импульсы конечной длительности); на фиг.5 - функциональная схема примера технической реализации предлагаемого способа ультразвукового томографического контроля изде45 лий; на фиг.6-пояснение к выводу формулы (2) Для получения томографического изображения дефекта предлагаемым способом ультразвукового томографического контроля изделий (проиллюстрирован процесс
50 формирования парциального изображения точечного дефекта); на фиг.7 - пояснения к: 1) модели отражения звука в предлагаемом способе ультразвукового томографического контроля изделий; 2) анализу разрешающей
55 способности нового способа (проиллюстрирован случай идентификации протяженного дефекта больших волновых размеров).
Покажем, как получена формула (2).. Формула (2) является оригинальной, позволяет производить восстановление как локализованных, так и протяженных дефектов и сконструирована с учетом опыта применения метода синтезированной апертуры и триангуляционных методов. При этом учитывается, что каждая составная часть протяженного дефекта видна с ограниченного числа положений связанной системы преобразователей из-за того, что такой дефект избирательно по направлениям отражает звук (узкая характеристика направленности для отражения, зеркальное отражение звука).. .
Рассмотрим, как при наличии протяженного дефекта поведут себя методы синтезированной апертуры и триангуляции и как их надо изменить для более полного и устойчивого получения изображения.
.. 1. Метод синтезированной апертуры основан на накоплении информации о дефекте с разных положений преобразователя. Чем больше таких положений преобразователя или область синтезирования, тем отчетливее восстанавливается изображение. При локализованном дефекте имеется возможность получить отраженный звук при озвучивании дефекта с разных сторон и тем самым получить значительную область синтезирования и, следовательно, качественное изображение, При восстановлении протяженного дефекта его можно представить в виде совокупности дефектов малого размера (разбиУь на части) и рассматривать механизм восстановления каждой такой части. Из-за зеркального характера отражения звука каждая часть протяженного дефекта, кроме краев дефекта, прозвучива- ется или видна с небольшой области сканирования. Таким образом, итоговое .изображение оказывается размазанным (это иллюстрируется ранее в тексте), Суммируя, можно сделать вывод о том, что для получения качественного изображения протяженного дефекта алгоритм метода синтезированной апертуры должен быть дополнен так, чтобы на основании измерений с небольшой области синтезирования можно было восстановить достаточно локальное изображение той части протяженного дефекта, которая видна по зеркальному отражению, а полную область сканирования использовать для восстановления различных частей протяженного дефекта,
контроля изделий, используются чисто геометрические соображения.
Если в трех точках (в двух - для двумерного случая) измерить время прихода отраженного сигнала, то зная эти времена и координаты этих точек (что известно), можно определить координаты точки, отражающей или излучающей звук. Метод триангуляции 5 не нашел широкого распространения в то- мографических системах из-за необходимости выполнения вычислительных операций, требующих больших затрат времени, так как метод синтезированной апертуры оказался
0 предпочтительным. Если же дефект протяженный, метод триангуляции можно использовать для.определения координат каждой части дефекта, аппроксимируя каждую из таких частей точкой. Однако, как
5 отмечалось выше, область, из которой видна каждая часть дефекта, ограничена (мала), что применительно к триангуляционным методам означает малую базу триангуляции. Известно, что при малой величине базы по0 добные алгоритмы становятся чувствительными к разного рода ошибкам и шумам, т.е. теряют устойчивость, хотя с принципиальной точки зрения и позволяют определять координаты каждой части протяженного де5 фекта. Низкая устойчивость и, следовательно, значительные . погрешности в определении координат частей протяженного дефекта приведет к искаженному восприятию дефекта, заключающемуся в
0 нарушении связного характера дефекта (точки, характеризующие положения частей дефекта, будут рассеяны и не будут восприниматься как составляющие одного дефек- та).
5 С математической точки зрения низкая устойчивость объясняется жесткостью постановки задачи - требованием знания координат, а не областей, в которых возможно наличие отражения звука. Подводя итогана0 лиза триангуляционных методов, укажем на необходимость такой модернизации алгоритмов, которая, во-первых, позволила бы-, сохранять устойчивость и, во-вторых, не столько определять координаты, сколько
5 области. Очевидно, что чем меньше база, тем больше должна быть такая область, чтобы сохранить устойчивость..
Исходя из перечисленных соображений и была предложена формула (2). Поясним,
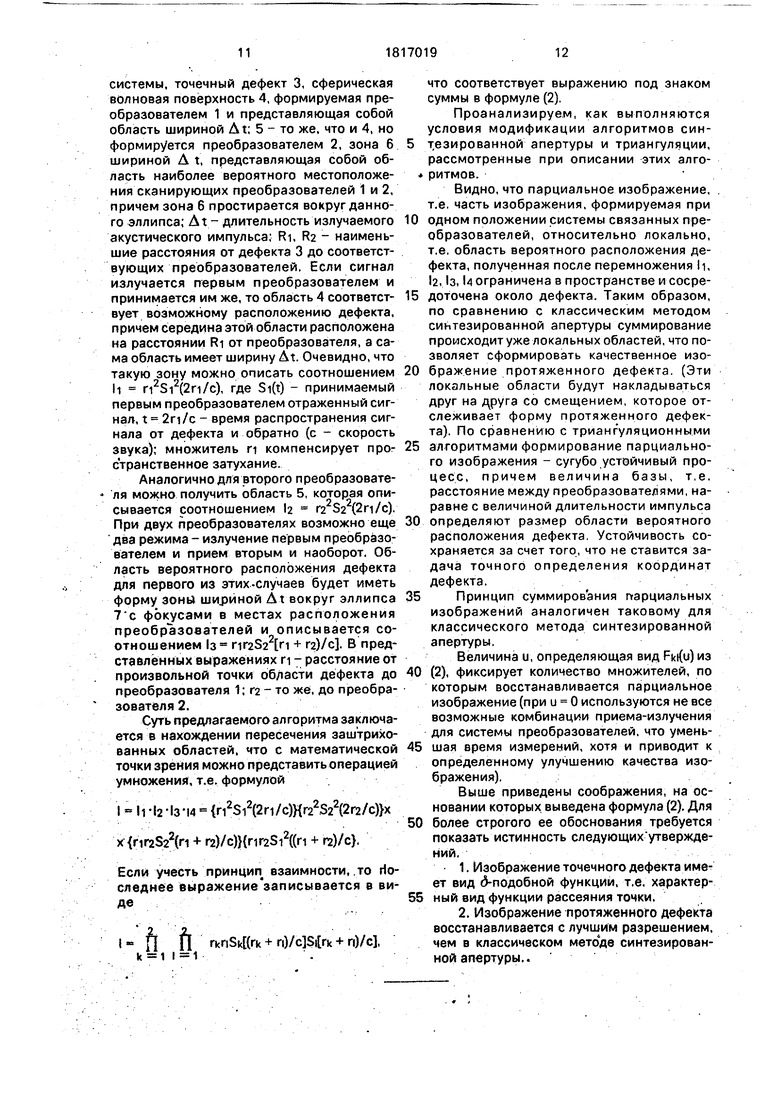
0 как эти соображения в ней реализованы. Для простоты описания ограничимся первоначально двумерным случаем и системой из двух преобразователей (1 и 2). Примем длительность зондирующего им5 пульса, равную At (зондирующий импульс может иметь огибающую любой формы - прямоугольной, колоколообразной и т.п.). Будем отмечать области вероятного расположения дефекта; на фиг.6 показаны акустические преобразователи 1 и 2 сканирующей .
системы, точечный дефект 3, сферическая волновая поверхность 4, формируемая преобразователем 1 и представляющая собой область шириной At; 5 - то же, что и 4, но формируется преобразователем 2, зона 6 шириной A t, представляющая собой область наиболее вероятного местоположения сканирующих преобразователей 1 и 2, причем зона 6 простирается вокруг данного эллипса; At - длительность излучаемого акустического импульса; Ri, R2 - наименьшие расстояния от дефекта 3 до соответствующих преобразователей. Если сигнал излучается первым преобразователем и принимается им же, то область 4 соответствует возможному расположению дефекта, причем середина этой области расположена на расстоянии RI от преобразователя, а сама область имеет ширину At. Очевидно, что такую зону можно описать соотношением И ri2Si2(2n/c), где Si(t) - принимаемый первым преобразователем отраженный сигнал, t 2п/с - время распространения сигнала от дефекта и обратно (с - скорость звука); множитель п компенсирует пространственное затухание.
Аналогично для второго преобразователя можно получить область 5, которая описывается соотношением Iz Г22522(2п/с). При двух преобразователях возможно еще два режима - излучение первым преобразователем и прием вторым и наоборот. Область вероятного расположения дефекта для первого из этих-случаев будет иметь форму зонй шириной At вокруг эллипса 7 с фокусами в местах расположения преобразователей и описывается соотношением з riraS22 ri + г2)/с. В представленных выражениях п - расстояние от произвольной точки области дефекта до преобразователя 1; га - то же, до преобразователя 2.
Суть предлагаемого алгоритма заключается в нахождении пересечения заштрихованных областей, что с математической точки зрейия можно представить операцией умножения, т.е. формулой.
I II -12 Мз-14 - {Г12812(2Г1/С)НГ22522(2Г2/С)}Х X {ПГ2522(Г1 + Г2)/С)}{Г1Г2512((Г1 + Г2)/С}.
Если учесть принцип взаимности, .то Последнее выражение записывается в виде
йЖ
fkriSk {rk + n) + n)/cj,
что соответствует выражению под знаком суммы в формуле (2).
Проанализируем, как выполняются условия модификации алгоритмов синт,езированной апертуры и триангуляции, рассмотренные при описании этих алго- ритмов.
Видно, что парциальное изображение, т.е. часть изображения, формируемая при
одном положении системы связанных преобразователей, относительно локально, т.е. область вероятного расположения дефекта, полученная после перемножения И, 12, з, Ц ограничена в пространстве и сосредоточена около дефекта. Таким образом, по сравнению с классическим методом синтезированной апертуры суммирование происходит уже локальных областей, что позволяет сформировать качественное изображение протяженного дефекта. (Эти локальные области будут накладываться друг на друга со смещением, которое отслеживает форму протяженного дефекта). По сравнению с триангуляционными
алгоритмами формирование парциального изображения - сугубо устойчивый процесс, причем величина базы, т.е. расстояние между преобразователями, наравне с величиной длительности импульса
определяют размер области вероятного расположения дефекта. Устойчивость сохраняется за счет того, что не ставится задача точного определения координат дефекта.
Принцип суммирования парциальных изображений аналогичен таковому для классического метода синтезированной апертуры.
Величина и, определяющая вид Fktfu) из
(2), фиксирует количество множителей, по которым восстанавливается парциальное изображение (при и 0 используются не все возможные комбинации приема-излучения для системы преобразователей, что уменьшая время измерений, хотя и приводит к определенному улучшению качества изображения).
Выше приведены соображения, на основании которых выведена формула (2). Для
более строгого ее обоснования требуется показать истинность следующих утвержде- ний.
Докажем каждое из этих утверждений. Для этого рассмотрим формирование томог- р афического изображения изделия в случае облучения его идеальными б-импульсами. Обозначение переменных и их смысл при доказательстве будут соответствовать ранее введенным в тексте описания.
Slk (tijkl) 3(t-.t|j0kl)
(3)
где jo определяет точку местоположения точечного дефекта в контролируемом изделии.
Подставив формулу (3) в формулу (2) описания, получим выражение вида
0,-i п ft
I 1k 1 1 1
х njlnjk (5 (t - tijoki) 5 (t - tjjoik) Fki(u):
(4).
Входящие в формулу произведения d-функций отличны от нуля лишь в случае одновременного равенства нулю обоих аргументов последних (в этом случае результирующее томографическое изображение j-й точки контролируемого изделия будет отлично от нуля). Описанное условие выполняется лишь при j j0, т.е. только для точки изделия, содержащей точечный дефект. Отметим что в случае облучения контролируемого изделия реальными импульсами конечной длительности изображение точечного дефекта будет не точка, а некоторая область (пояснения - фиг.3,4, а также их разъяснение в тексте).
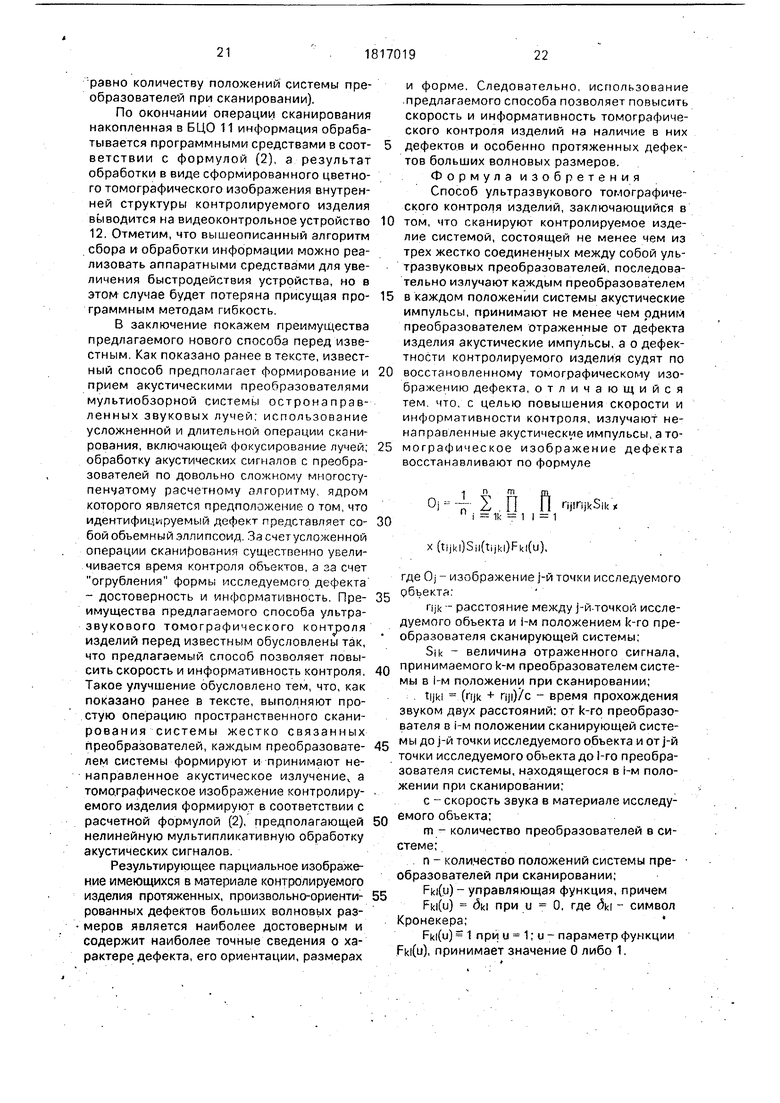
Sik (t)
d (t) - 2 уо/с О
где для двумерного случая дефект представляет собой отрезок большой волновой
длины I, расположенный параллельно плоскости сканирования на глубине уо (фиг.7). В зеркальном отражении имеется д-функция(зона 1). в остальных случаях (зона 2)
принимаемый сигнал близок к нулю. Обозначения фиг.7 соответствуют; преобразователи 1 и 2, протяженный дефект 3 больших волновых размеров I.
5При использовании классического метода синтезированной апертуры изображение имеет вид размазанной картины, простирающейся от самого дефекта с плавным уменьшением уровня при приближе0 нии в приемной апертуре (фиг.З), так как показанные на фиг.З дуги не будут пересекаться в одной точке, как для локального дефекта,
При нахождении изображения по вы5 ражению (2) произведение d-функций и для системы из двух преобразователей и Fki(u) дм изображение отлично от нуля при координате х в интервале -I/2 + Лх/2. I/2 - -Л х/2 и у 2 (дх/2)2 - где А х - рас0 стояние между преобразователями. Таким образом, получается смещенное и незначительно укороченное изображение дефекта. Если учесть, что Ах « у0, то смещением по оси у в практических случаях можно пренеб5 речь, а эффект укорочения образа дефекта при конечной длительности импульса будет вообще отсутствовать. В результате изображение оказывается локализованным. При конечной длительности импульса изобра0 жение размазывается и целесообразно использовать большее количество множите- лей.
5 количестве преобразователей в связанной системе включает, кроме изображения самих дефектов, также дугу окружности, проходящей через дефекты, центр которой лежит на приемной апертуре. Уровень изо0 бражения на этой дуге на порядок ниже уровня в местоположении дефектов и уменьшается при увеличении расстояния между дефектами. Кроме того, увеличение числа преобразователей приводит к резко5 му уменьшению уровня ложных сигналов. Аналитические выкладки громоздки и здесь не приводятся. Результаты численного моделирования и экспериментов показывают справедливость третьего утверждения.
0 Поясним сущность предлагаемого . изобретения. Предлагаемый способ предполагает формирование и прием преобразователями системы ненаправленного акустического излучения, что позволило уп5 ростить и ускорить процедуру сканирования и совместно с новым методом обработки измеряемых акустических сигналов увеличить информативность контроля. Использование ненаправленного акустического приемоизл учения позволило накапливать
информацию с нескольких положений сканирующей системы преобразователей, так как в этом случае,часть звуковой энергии, излученной в контролируемое изделие, вернется обратно на преобразователи системы (пояснение на фиг,2). Поэтому для сбора информации была выбрана несложная процедура пространственного сканирования системой преобразователей, что позволило в итоге существенно увеличить скорость контроля изделий.
Поясним причины повышения информативности контроля. При сборе информации в процессе сканирования системой связанных преобразователей возможны два случая:
1). Последовательно каждым преобразователем системы в каждом положении по- следней при сканировании излучают акустический импульс, а отраженный эхо- сигнал принимают одним преобразователем системы (тем, который только что излучил).
2). Последовательно, каждым преобразователем системы в каждом положении по- с ледней при сканировании излучают акустический импульс, а отраженный эхо- сигнал принимают одновременно всеми преобразователями системы (включая тот, который только что излучал),
Конкретный режим коммутации (а значит, и контроля в целом) определяется выбором значения управляющего параметра и функции Fki(u): при и О получаем контроль для случая 1; при и 1 - вариант контроля для случая 2. Ниже будет пояснено отличие двух возможных режимов контроля.
Первоначально рассмотрим случай 1, ограничившись использованием минимально возможного количества преобразователей в системе - тремя. Минимально возможное количество преобразователей в системе выбрано равным трем, так как реальный идентифицируемый дефект представляет собой трехмерный объект и для его обнаружения необходимо иметь информацию о трех взаимно независимых координатах, что обеспечивается наличием как минимум трех преобразователей. Их расположение в системе должно быть таким, что- бы они не лежали на одной прямой. Оптимальная конфигурация - размещение преобразователей в вершинах равностороннего либо равнобедренного треугольника. В первом случае получаем одинаковое разрешение в любом направлении относи- тел ьно траектории сканирования. Во втором случае необходимо сориентировать систему так, чтобы обеспечить наилучшее разрешение в интересующем направлении
при сканировании (отметим, что конфигурация равнобедренный треугольник обеспечивает меньшее время контроля за счет большего охвата поверхности контролируемого изделия в одном из направлений при сканировании). Взаимные расстояния меж- , ду преобразователями устанавливаются непосредственно перед операцией контроля; оптимальные для каждого конкретного ма0 териала расстояния выбираются, исходя из результатов, полученных при испытании системы на тест-объектах.
Правильная установка взаимных расстояний между преобразователями системы
5 гарантирует качество получаемого томогра- фического изображения; при их выборе для каждого конкретного материала контролируемого изделия необходимо руководство- ваться следующими соображениями.
0 Уменьшение взаимных расстояний между, преобразователями системы приближает данный новый способ к способу получения изображений по методу синтезированной апертуры. Излишнее увеличение
5 взаимных расстояний приводит к ухудшению помехоустойчивости результирующего изображения. Требуемое отношение сигнал-шум, зависит от физических свойств материала контролируемого изделия и, в
0 частности, от степени его однородности, зернистости и тому подобное. Поэтому непосредственно перед операцией контроля производят регулировку взаимных расстояний между преобразователями сканирую5 щей системы, исходя из данных, полученных при испытании последней на тест-объектах.
На фиг.4 показаны два из трех преобразователей для одного из положений систе0 мы при сканировании и плоскостное сеченме контролируемого изделия. За счет того, что расстояния, проходимые звуковой волной в материале объекта от излучающего преобразователя до дефекта и от дефекта до
5 приемного преобразователя, будут изменяться в зависимости от того, какой из трех преобразователей излучает, получаемая для данного местоположения системы информация по окончании операций приемоизлу0 чения представляет собой три различных ракурса обзора (сравним с известным способом синтезированной апертуры, где с каждого положения преобразователя при сканировании имеем один ракурс обзора).
5 Кроме того, предлагается новый способ обработки сигналов с преобразователей системы - для любого положения системы при сканировании по окончании операций при- емоизяучения -производят перемножение сигналов с преобразователей. Такие произведения накапливаются при сканировании и по окончании контроля усредняются. Применение нелинейной мультипликативной обработки сигналов, как показано ранее, далее более компактное парциальное изображение (фиг.4,6,7), так как при перемножении волновых фронтов величина сигнала от области пересечения последних будет по меньшей мере на порядок больше, чем величина сигнала на поверхностях фронтов.
Идентификация дефектов и восстановление томографического изображения внут- ренней структуры контролируемого изделия по предлагаемому способу описывается оригинальной формулой (2), причем для рассмотренного конкретного случая значение управляющего параметра и функции Fki(u) было выбрано равным нулю, а количество преобразователей в системе m 3.
В случае 2, когда значение управляющей функции Fki(u) тождественно равно единице (и 1), получим наиболее качественный вариант контроля, когда каждый ненаправленный преобразователь в каждом положении системы при сканировании последовательно излучает акустический импульс, а отраженный эхо-сигнал принимают одновременно всеми преобразователями, т.е. получаемая информация содержит девять ракурсов обзора дефекта для каждого положения системы при сканировании.
Следует заметить, что при увеличении числа преобразователей в системе улучшаются качество контроля объектов, помехоустойчивость способа и в пределе скорость контроля. Улучшение качества и помехоустойчивости объясняется увеличением числа ракурсов обзора дефекта в материале контролируемого изделия, что приводит к увеличению информативности контроля, Увеличение скорости объясняется увеличением площади охвата поверхности контролируемого изделия системой связанных преобразователей, что приводит к уменьшению количества шагов при сканировании. Однако оптимальное количество преобразователей в системе и наилучшую конфигурацию последней следует выбирать исходя из результатов испытаний на тест-объектах.
Отметим, что предлагаемый способ предполагает распространение в контролируемом изделии одного типа волн, так как в формулу (2) входит скорость звука с, а для различных типов волн скорость звука отлична. В металлах (неразрушающий контроль) могут существовать как продольные, так и поперечные волны. Как будет показано ниже, избавиться от одного из типов волн можно путем подбора угла ввода звукового луча в контролируемое изделие.
Далее необходимо отметить, что термины ненаправленное излучение, ненаправленный прием являются идеализированными - на практике невозможно создать преобра- 5 зователь с идеальной характеристикой направленности вида монополь. Поэтому в эмпирических случаях под термином ненаправленный понимают излучение или прием сигналов в широком, но ограни0 ченном угловом диапазоне (имеется в виду угловой раскрыв характеристики направленности).
Суммируя изложенные факты, отметим, что при реализации предлагаемого способа
5 в области, например, неразрушающего контроля угловой раскрыв преобразователей и угол ввода звукового луча в контролируемое изделие следует выбирать таким, чтобы обеспечить излучение, распространение и
0 прием лишь поперечных волн (избавившись от продольных волн за счет эффекта полного внутреннего отражения от поверхности контролируемого изделия). Подобный путь аналогичен использующемуся в традиционных
5 методах синтезированной апертуры.
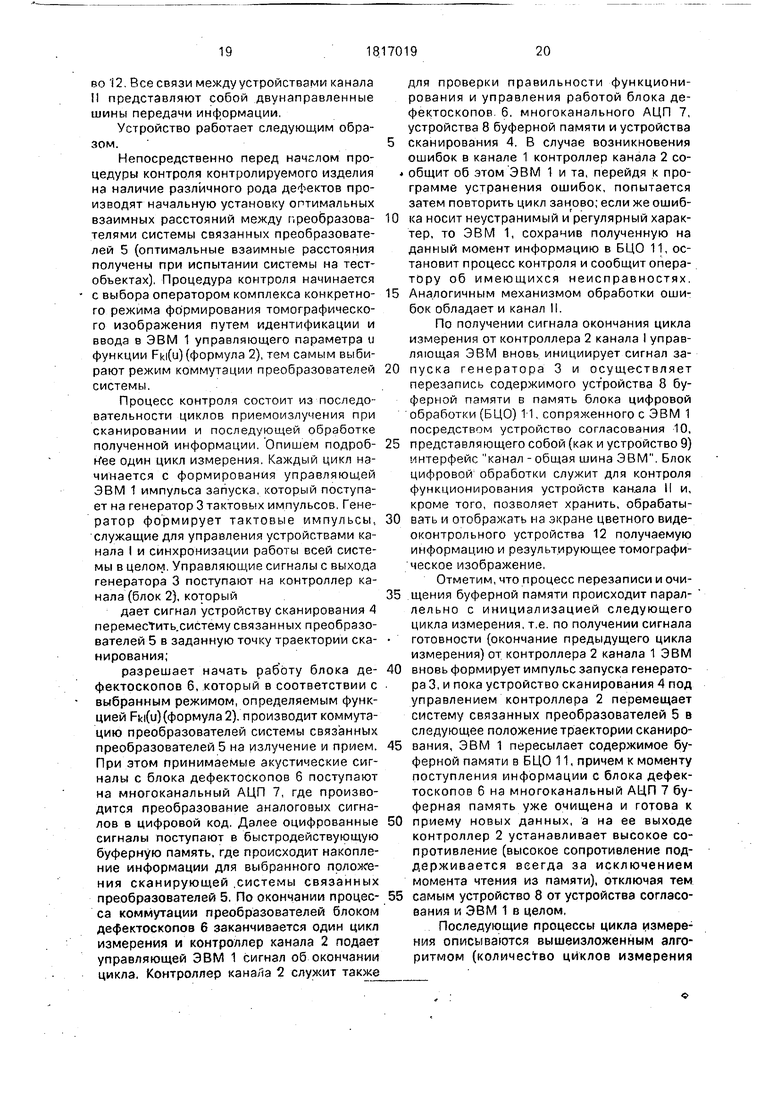
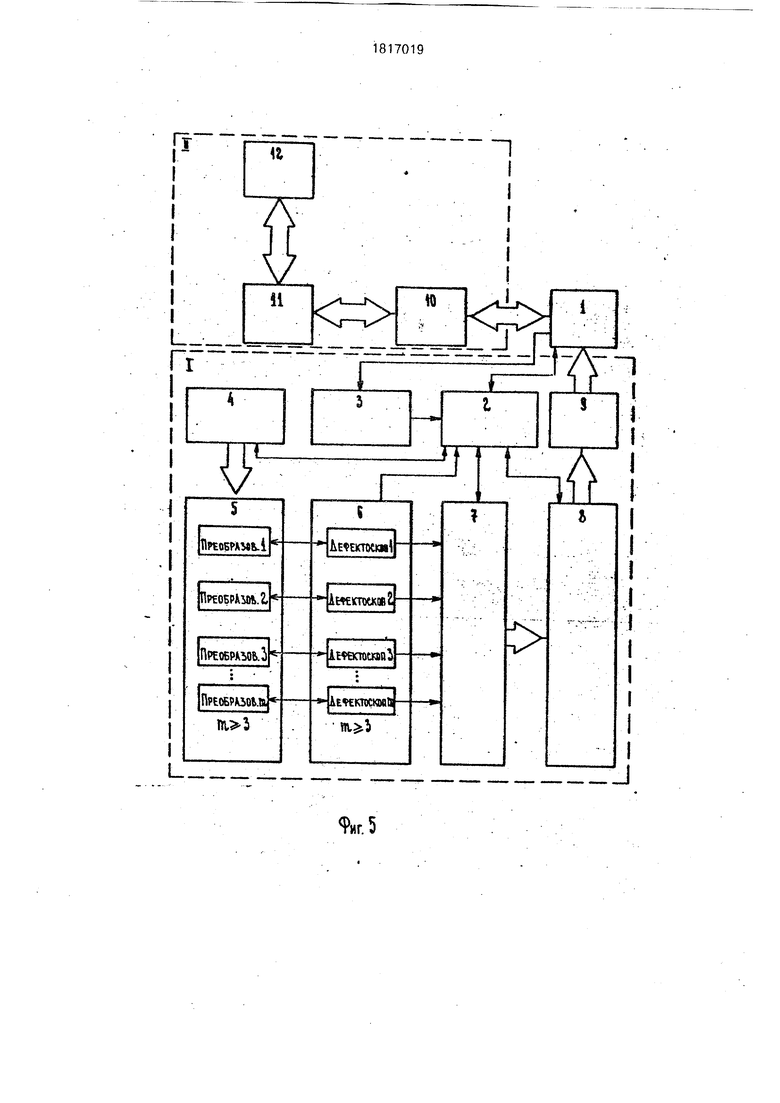
Приведем пример технической реализации предлагаемого нового способа. На фиг.5 представлена функциональная схема устройства. Устройство состоит из управля0 ющей ЭВМ 1 и подключенных к ней двух автономных информационных каналов I и П. Каждый канал представляет собой совокупность связанных устройств .сбора, обработки и передачи информации. Опишем
5 Подробнее кзждый из них, причем начнем с описания канала I.
К ЭВМ 1 подключен контроллер 2 канала I, генератор 3 тактовых импульсов и устройство согласования 9 канала I; к
0 контроллеру 2 при помощи двунаправленной шины передачи информации подключены устройство сканирования 4. блок дефектоскопов 6, многоканальный АЦП 7, устройство 8 буферной памяти 8; к выходу генератора 3
5 подключен контроллер 2 канала ; устройство сканирования 4 механически связано с системой связанных преобразователей 5, выходы которой соединены с блоком дефектоскопов 6 двунаправленными шинами передачи ин0 формации; выходы блока дефектоскопов 6 соединены с многоканальным АЦП 7, подключенным к устройству 8 буферной памяти, а выходы последнего соединены с устройством согласования 9.
5 В канала II входят блок 11 цифровой обработки сигналов (стандартное устройство с встроенным контроллером), подключенный к управляющей ЭВМ 1 через устройство согласования 10, причем к блоку 11 подключено видеоконтрольное устройство 12. Все связи между устройствами канала II представляют собой двунаправленные шины передачи информации,
Устройство работает следующим образом.
Непосредственно перед начслом процедуры контроля контролируемого изделия на наличие различного рода дефектов производят начальную установку оптимальных взаимных расстояний между преобразователями системы связанных преобразователей 5 (оптимальные взаимные расстояния получены при испытании системы на тест- объектах). Процедура контроля начинается с выбора оператором комплекса конкретного режима формирования томографическо- го изображения путем идентификации и ввода в ЭВМ 1 управляющего параметра и функции Fki(u) (формула 2), тем самым выбирают режим коммутации преобразователей системы.
Процесс контроля состоит из последовательности циклов приемоизлучения при сканировании и последующей обработке полученной информации. Опишем подробнее один цикл измерения. Каждый цикл начинается с формирования управляющей ЭВМ 1 импульса запуска, который поступает на генератор 3 тактовых импульсов. Генератор формирует тактовые импульсы, служащие для управления устройствами канала I и синхронизации работы всей системы в целом. Управляющие сигналы с выхода генератора 3 поступают на контроллер канала (блок 2), который
дает сигнал устройству сканирования 4 переместить.систему связанных преобразователей 5 в заданную точку траектории сканирования;
разрешает начать работу блока дефектоскопов 6, который в соответствии с выбранным режимом, определяемым функцией Fki(u) (формула 2). производит коммутацию преобразователей системы связанных преобразователей 5 на излучение и прием. При этом принимаемые акустические сигналы с блока дефектоскопов 6 поступают на многоканальный АЦП 7, где производится преобразование аналоговых сигналов в цифровой код. Далее оцифрованные сигналы поступают в быстродействующую буферную память, где происходит накопление информации для выбранного положения сканирующей .системы связанных преобразователей 5. По окончании процесса коммутации преобразователей блоком дефектоскопов 6 заканчивается один цикл измерения и контроллер канала 2 подает управляющей ЭВМ 1 сигнал об окончании цикла, Контроллер канаЯа 2 служит также
для проверки правильности функционирования и управления работой блока дефектоскопов. 6, многоканального АЦП 7, устройства 8 буферной памяти и устройства
сканирования 4. В случае возникновения ошибок в канале 1 контроллер канала 2 со- общит об этом ЭВМ 1 и та, перейдя к программе устранения ошибок, попытается затем повторить цикл заново; если же ошибка носит неустранимый и регулярный характер, то ЭВМ 1, сохранив полученную на данный момент информацию в БЦО 11, остановит процесс контроля и сообщит оператору об имеющихся неисправностях.
Аналогичным механизмом обработки ошибок обладает и канал II.
По получении сигнала окончания цикла измерения от контроллера 2 канала I управляющая ЭВМ вновь инициирует сигнал запуска генератора 3 и осуществляет перезапись содержимого устройства 8 буферной памяти в память блока цифровой обработки (БЦО) 1-1, сопряженного с ЭВМ 1 посредством устройство согласования 10,
представляющего собой (как и устройство 9) интерфейс канал - общая шина ЭВМ. Блок цифровой обработки служит для контроля функционирования устройств канала II и, кроме того, позволяет хранить, обрабатывать и отображать на экране цветного видеоконтрольного устройства 12 получаемую информацию и результирующее томографи- ческое изображение,
Отметим, что процесс перезаписи и очищения буферной памяти происходит параллельно с инициализацией следующего цикла измерения, т.е. по получении сигнала готовности (окончание предыдущего цикла измерения) от контроллера 2 канала 1 ЭВМ
вновь формирует импульс запуска генератора 3, и пока устройство сканирования 4 под управлением контроллера 2 перемещает систему связанных преобразователей 5 в следующее положение траектории сканирования, ЭВМ 1 пересылает содержимое буферной памяти в БЦО 11, причем к моменту поступления информации с блока дефектоскопов 6 на многоканальный АЦП 7 буферная память уже очищена и готова к
приему новых данных, а на ее выходе контроллер 2 устанавливает высокое сопротивление (высокое сопротивление поддерживается всегда за исключением момента чтения из памяти), отключая тем
самым устройство 8 от устройства согласования и ЭВМ 1 в целом,
Последующие процессы цикла измерения описываются вышеизложенным алгоритмом (количество циклов измерения
равно количеству положений системы преобразователей при сканировании).
По окончании операции сканирования накопленная в БЦО 11 информация обрабатывается программными средствами в соот- ветствии с формулой (2), а результат обработки в виде сформированного цветного томографического изображения внутренней структуры контролируемого изделия выводится на видеоконтрольное устройство 12. Отметим, что вышеописанный алгоритм сбора и обработки информации можно реализовать аппаратными средствами для увеличения быстродействия устройства, но в этом случае будет потеряна присущая про- граммным методам гибкость.
В заключение покажем преимущества предлагаемого нового способа перед известным. Как показано ранее в тексте, известный способ предполагает формирование и прием акустическими преобразователями мультиобзорной системы остронаправленных звуковых лучей; использование усложненной и длительной операции сканирования, включающей фокусирование лучей; обработку акустических сигналов с преобразователей по довольно сложному многоступенчатому расчетному алгоритму, ядром которого является предположение о том, что идентифицируемый дефект представляет со- бой объемный эллипсоид. Засчетусложенной операции сканирования существенно увеличивается время контроля объектов, а за счет огрубления формы исследуемого дефекта - достоверность и информативность. Пре- имущества предлагаемого способа ультразвукового томографического контроля изделий перед известным обусловлены так, что предлагаемый способ позволяет повысить скорость и информативность контроля, Такое улучшение обусловлено тем, что, как показано ранее в тексте, выполняют простую операцию пространственного сканирования системы жестко связанных преобразователей, каждым преобразовате- лем системы формируют и принимают ненаправленное акустическое излучение,, а томографическое изображение контролиру- емого изделия формируют в соответствии с расчетной формулой (2), предполагающей нелинейную мультипликативную обработку акустических сигналов.
Результирующее парциальное изображение имеющихся в материале контролируемого изделия протяженных, произвольно-ориенти- рованных дефектов больших волновых размеров является наиболее достоверным и содержит наиболее точные сведения о характере дефекта, его ориентации, размерах
и форме. Следовательно, использование .предлагаемого способа позволяет повысить скорость и информативность томографического контроля изделий на наличие в них дефектов и особенно протяженных дефектов больших волновых размеров. Формула изобретения Способ ультразвукового томографического контроля изделий, заключающийся в том, что сканируют контролируемое изделие системой, состоящей не менее чем из трех жестко соединенных между собой ультразвуковых преобразователей, последовательно излучают каждым преобразователем в каждом положении системы акустические импульсы, принимают не менее чем одним преобразователем отраженные от дефекта изделия акустические импульсы, а о дефектности контролируемого изделия судят по восстановленному томографическому изображению дефекта, отличающийся тем, что, с целью повышения скорости и информативности контроля, излучают ненаправленные акустические импульсы, а то- мографическое изображение дефекта восстанавливают по формуле
1
ni mРг Е . П П HjinjkSlk :
X (tijkl)Sil(tijkl)Fkl(u),
где О; - изображение j-й точки исследуемого Объекта;
rijk - расстояние между j-й-точкой исследуемого объекта и i-м положением k-ro преобразователя сканирующей системы;
Sik величина отраженного сигнала, принимаемого k-м преобразователем системы в i-м положении при сканировании;
. tijki . (rrjk + П|0/с - время прохождения звуком двух расстояний: от k-ro преобразователя в i-м положении сканирующей системы до j-й точки исследуемого объекта и от j-й точки исследуемого объекта до 1-го преобразователя системы, находящегося в i-м положении при сканировании;
с - скорость звука в материале исследуемого объекта;
m - количество преобразователей в системе;
. п - количество положений системы преобразователей при сканировании;
Fki(.u) - управляющая функция, причем
Fki(u) 5ki при и 0, где дм - символ Кронекера;
Fki(u) 1 при и 1; и - параметр функции Fki(u), принимает значение 0 либо 1.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Теория и практика ультразвукового контроля, И.Н | |||
| Ермолов., М.: Машиностроение, 1981, | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство ультразвукового контроля материалов и изделий | 1987 |
|
SU1397830A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
