Изобретение относится к учебинм демонстрационным приборам по механике и физике и может быть использован, например, в учебном процессе при изучении курсов механики и физики.
Цель изобретения - расширение диапазона peniaeNbix задач путем демонстрации вращения маховика вокруг оси в нижнем положении и определения его угловой скорости и кинетической энергии .
На чертеже представлена схема при- борао
пары ветвей на другую, маховик начинает подниматься, наматывая все четыре ветви одновременно, и достигает в своем движении высшей точки. После этого начинается новый цикл движения маховика. Таким образом демонстрируются три этапа движения маховика: опускание, вращение в низшем положении и подъемо
Замеряя время движения маховика, например, секундомером на всех этапах, зная число предварительно навитых на ось витков, массу и геометрию
| название | год | авторы | номер документа |
|---|---|---|---|
| Учебный прибор по механике | 1987 |
|
SU1441448A1 |
| УЧЕБНЫЙ ПРИБОР | 2017 |
|
RU2663008C1 |
| Устройство для вращательного бурения скважин | 1981 |
|
SU981559A1 |
| Учебный прибор по механике | 1988 |
|
SU1554004A1 |
| КОМБИНИРОВАННЫЙ СПОСОБ НАКОПЛЕНИЯ ЭНЕРГИИ | 2013 |
|
RU2548229C2 |
| Учебный прибор по механике | 1989 |
|
SU1727149A1 |
| УЧЕБНЫЙ ПРИБОР ПО ФИЗИКЕ | 1991 |
|
RU2017228C1 |
| Прибор по механике | 1981 |
|
SU989573A1 |
| Учебный прибор по сопротивлению материалов | 1987 |
|
SU1417028A1 |
| Учебный прибор для демонстрации гироскопического эффекта | 1983 |
|
SU1128287A1 |
Изобретение относится к области у-чебных демонстрационных приборов по - механике и физике и позволяет расширить дидактические возможности при решении задач механики и физики, например, в учебном процессе. Навивая на ось 4 маховика все четыре ветви гибких связей 5 и 6, поднимают маховик на заданную высоту и отпускают Под действием силы тяжести маховик опускается до тех пор, пока гибкие сйязи полностью не размотаются за исключением предварительной намотки 9, достигнув своей наинизшей точки. Вращаясь в этой точке, маховик разматывает предварительно навитые ветви гибких связей и наматывает две другие ветви на ось 4 за счет перемещения гибких связей по блокам 7 и 8, Перемотав предварительную намотку 9 с одной пары ветвей на другую маховик начинает подниматься, наматывая все четьфе ветви одновременно, и достигает высшей точки. Замеряя время движения маховика, зная число предварительно навитых на ось витков, массу и геометрию маховика, определяют угловую скорость маховика и его кинетическую энергию. Изменяя число предварительно навитых витков гибких связей и начальную высоту подъема маховика, регулируют продолжительность вращения маховика в наинизшем положении 1 ил о с (f. С ОС г N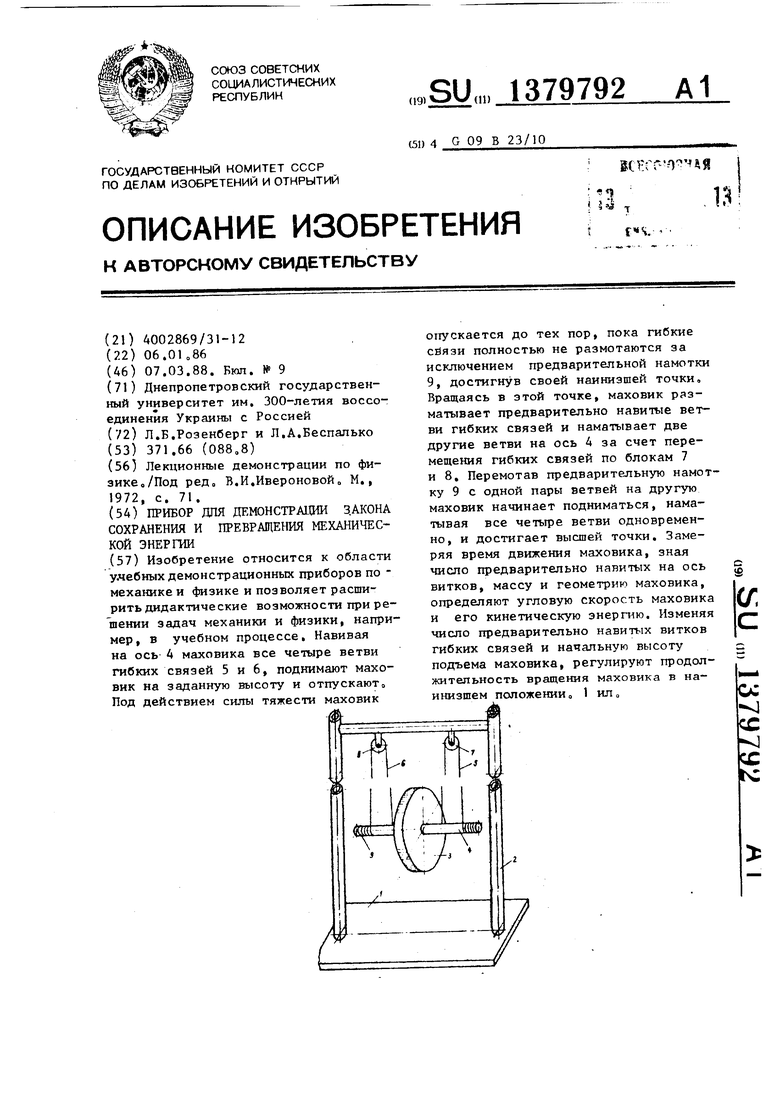
Прибор содержит основание 1, уста- 15 маховика, определяют угловую скорость
новленный на основании П-образный кронштейн 2, маховик, выполненный в виде массивного диска 3 с осью Д вращения, две гибкие связи 5 и 6 и два блока 7 и 8, прикрепленные к верхней перекладине кронштейна 2. Гибкие связи 5 и 6 переброшены через блоки 7 и 8, образуя четьфе ветви. Концы гибкой связи 5 прикреплены по одну сторону маховика к оси его вращения на некотором расстоянии друг от друга, а концы гибкой связи 6 аналогичным образом прикреплены к оси вращения маховика по другую его сторону.
20
25
маховика и его кинетическую энергию
Изменяя число предварительно нав тых витков гибких связей и начальну высоту подъема маховика регулируют продолжительность воашения маховика в наинизшем положении. Прибор позво ляет также устранить явление удара, которое имеет место в подобных систем при прохождении маховиком наинизшего положения и- сопровождается потерей механической энергии.,
Применение предлагаемого прибора позволит расширить дидактические во можности при решении задач механики
При этом две симметричные относитель- 30 Физики, например, в учебном процессе,
но маховика ветви гибких связей 5 и 6 предварительно навиты на ось 4 маховика в одну и ту же сторону на равное количество витков 9,
Прибор работает следующим образом. Навивая на ось 4 маховика все четыре ветви гибких связей 5 и 6, поднимают маховик на заданную высоту и отпускают. Под действием силы тяжести маховик опускается, разматывая при этом гибкие связи о Опускание маховика происходит до тех пор, пока гибкие связи полностью не размотаются, за
Прибор для демонстрации закона сохранения и превращения механической энергии, содержащий основание, установленный на основании кронштейн маховик, выполненный в виде массивного диска с осью вращения, две гибкие связи прикрепленные одним концом к оси вра щения маховика, отличающий- с я тем, что, с целью расширения диапазона решаемых задач, он содерисключением предварительной намотки 9 о Это положение является наинизшим жит два блока, прикрепленные к верх- в движении маховика Достигнув наиниз- ней перекладине кронштейна, гибкие шей точки, маховик, вращаясь в ту же сторону, разматывает предварительно навитые ветви и наматывает две другие ветви на ось 4, оставаясь все это время в одном наинизшем положении. Разматывание одних ветвей и наматывание другой пары ветвей гибких связей осуществляется за счет их перемещения по блокам 7 и 8, Перемотав предварительную навивку 9 с одной витков.
связи переброшены через блоки, образуя четыре ветви, свободные концы которых прикреплены к оси вращения маховика симметрично относительно последнего и на расстоянии от ранее закрепленных концов, при этом две симметричные относительно маховика ветви навиты на его ось в одну и ту же сторону на равное количество
маховика и его кинетическую энергию.
Изменяя число предварительно навитых витков гибких связей и начальную высоту подъема маховика регулируют продолжительность воашения маховика в наинизшем положении. Прибор позволяет также устранить явление удара, которое имеет место в подобных системах при прохождении маховиком наинизшего положения и- сопровождается потерей механической энергии.,
Применение предлагаемого прибора позволит расширить дидактические возможности при решении задач механики
цессе,
Формула изобретения
Прибор для демонстрации закона сохранения и превращения механической энергии, содержащий основание, установленный на основании кронштейн маховик, выполненный в виде массивного диска с осью вращения, две гибкие связи прикрепленные одним концом к оси вращения маховика, отличающий- с я тем, что, с целью расширения диапазона решаемых задач, он содержит два блока, прикрепленные к верх- ней перекладине кронштейна, гибкие витков.
жит два блока, прикрепленные к верх- ней перекладине кронштейна, гибкие витков.
связи переброшены через блоки, образуя четыре ветви, свободные концы которых прикреплены к оси вращения маховика симметрично относительно последнего и на расстоянии от ранее закрепленных концов, при этом две симметричные относительно маховика ветви навиты на его ось в одну и ту же сторону на равное количество
| Лекционные демонстграции по фи- зикео/Под редо В.И.Иверонсвойо М,, 1972, с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
