х
со оо
О5
фиг.1
Изобретение относится к электротехнике, а именно к системам управления электроприводом промышленных установок, и предназначено для формирования изменяющихся во времени задающих сигналов, величина которых отображает требуемый закон изменения перемещения, скорости и ускорения, например, шахтных подъемников, механизмов экскаваторов, подвижных звеньев манипуляторов нри пуске, разгоне, равномерном движении и торможении электродвигателя.
Цель изобрегения повьинение быстродействия электропривода.
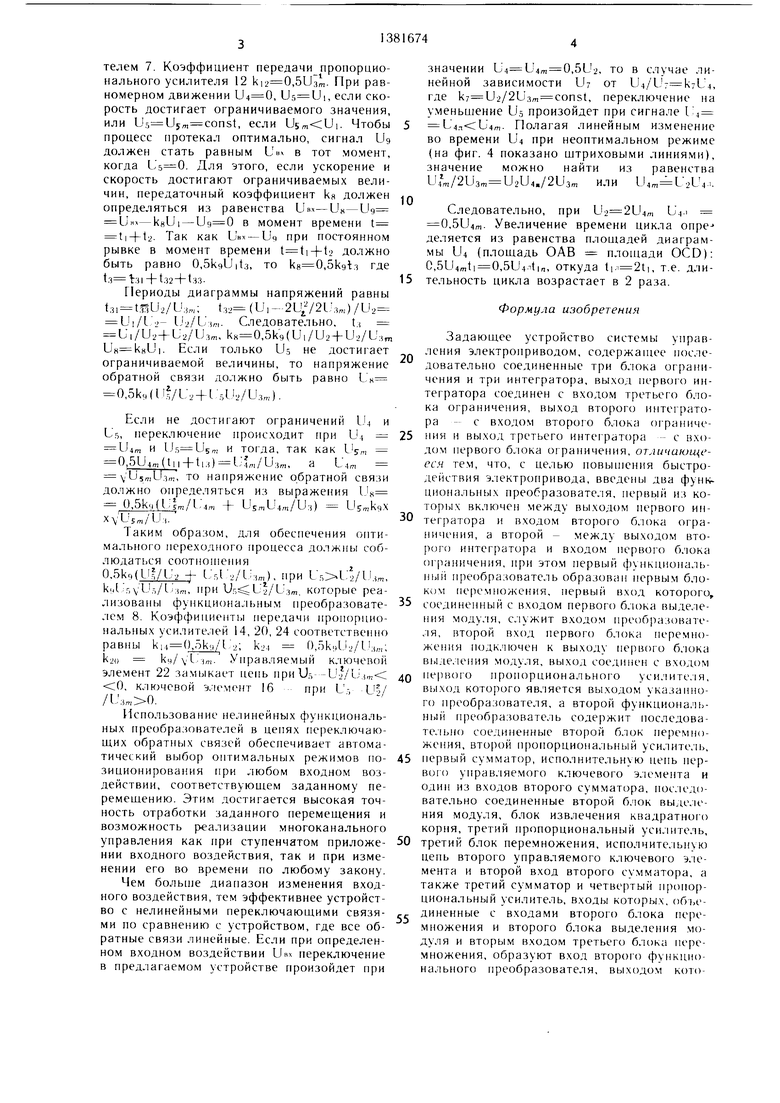
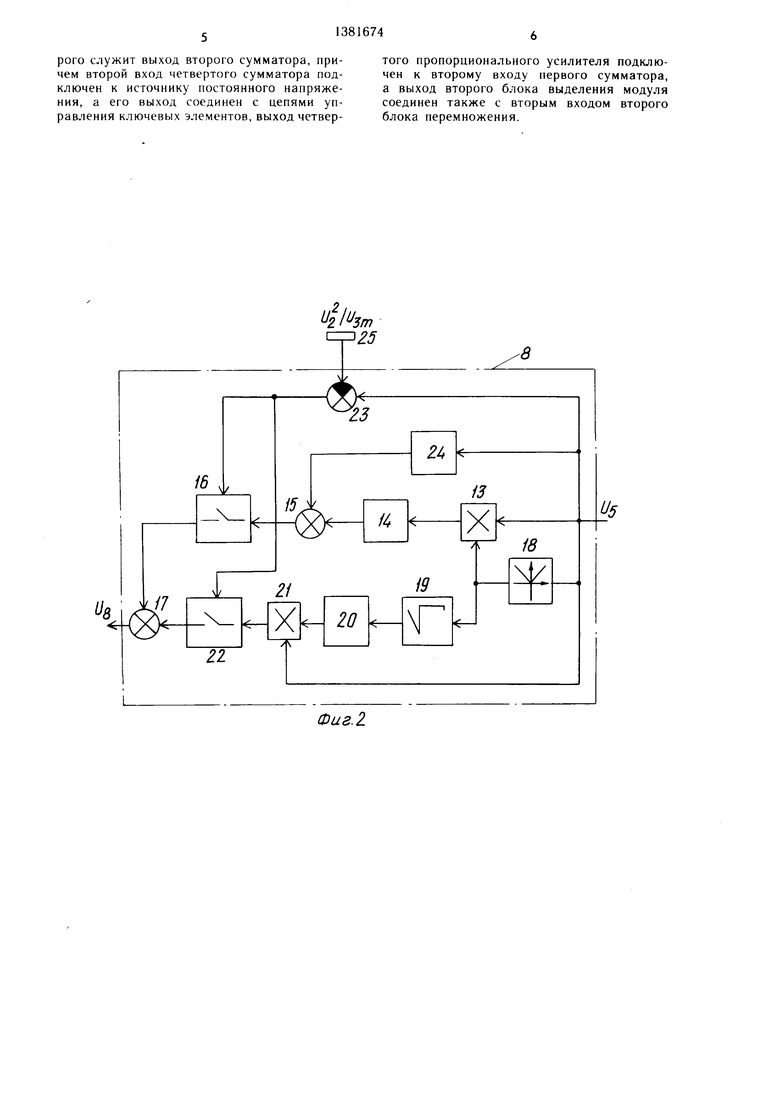
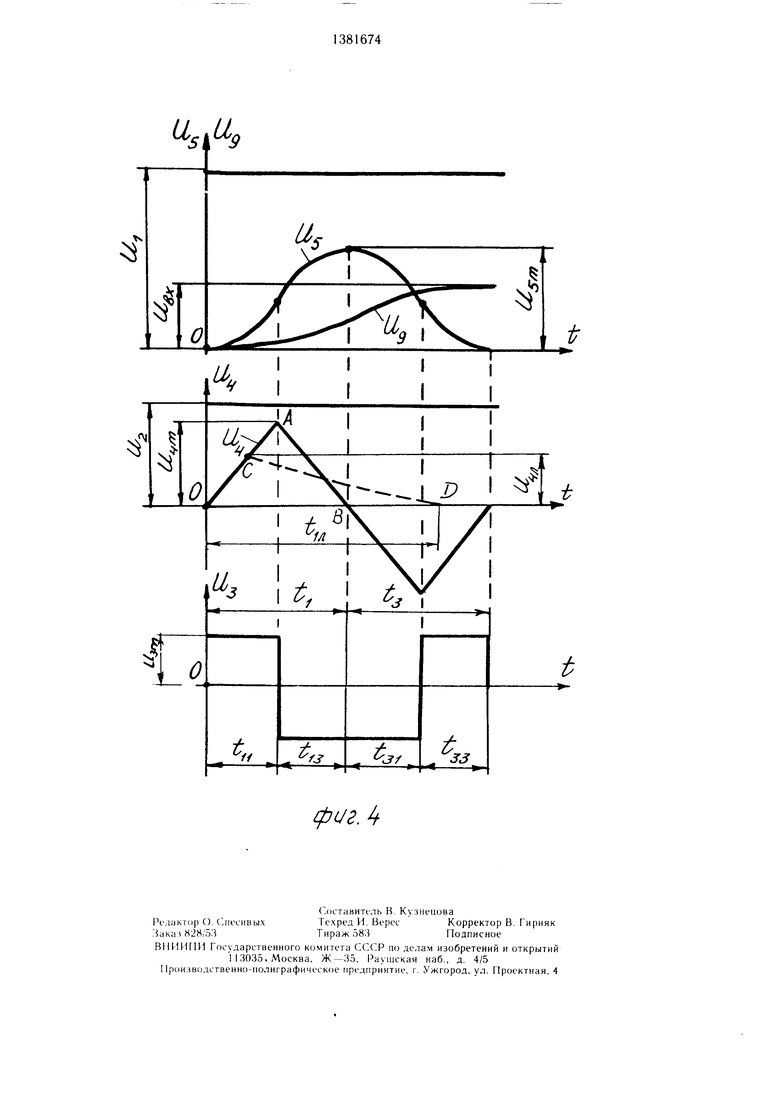
На фиг. I изображена функциональная схема задающего устройства ; на фиг. 2 схема второго функционального преобразователя; на фиг. 3 и 4 - диаграммы напряжений, характеризующих работу устройства, соответственно д-ля случая, когда обе ограничиваемые переменные (скорость и ускорение) достигают максимальных значений и когда эти 11еременн1,1е не достигают ог-- раничений.
Устройство (фи|. I) содержит последовательно соединенные блоки 1-3 ограничения и инте|-ра ropi) 4 6, при этом выход интег)атора 4 соединен с входом блока 3 огра}1ичения, вьгход интегратора 5 с входом б. юка 2 ограничения и выход интегратора 6 с входом блока 1 ограничения. Кроме того, в устройсгно введены функциональные преобразователи 7 и 8. первый из которых вк;1Н)че11 между выходом интег)а- тора 4 и входом блока 2 ограничения, а вто- )ой между выходом интегратора 5 и входом блока ограничения. Выход интегратора 6 связан с входом блока 1 О1 рани- чения через пропорциональный усилитель 9. Функциональный преобразователь 7 образован первым блоком К) перемножения, первый вход которого, соедипенп1з1Й с входом первого блока 11 выделения модуля, служит входом 11рес)б П1зователя 7, второй вход блока 10 перемпожения подключен к выходу блока 11 выделения модуля, выход соединен с входом пропорционального усилителя 12, выход которого является выходом указанного преобразователя, а функциональный преобразователь 8 (фиг. 2) содержит последовательно соединенные блок 13 перемножения, пропорциональный усилитель 14, сумматор 15, исполнительную цепь управляемого ключевого эле.ме1гга 16 и один из входов сумматора 17, пос-ледовательно соединенные блок 18 выде.тения модуля, блок И) изв.лече- ния квадратного корня, нропорциональный усилитель 20, блок 21 перемножения, ис- но.лните.льную цепь управляемого к,лючевого элемента 22 и второй вход сумматора 17, а также сумматор 23 и пропорциональный усилител) 24, входы которых, ненные с входами блока 13 перемножения, блока 18 выделения модуля и вторы.м входом
блока 21 г еремножения, образуют вход функционального преобразователя 8, выходом которого служит выход сумматора 17, причем второй вход сумматора 23 нодклю- чен к источнику 25 постоянного напряжения, а его выход соединен с цепями управления ключевых элементов 16 и 22, выход пропорционального усилителя 24 подключен к второму входу сумматора 15, а выход бло0
ка 18 выделения модуля соединен также с
вторым входом блока 13 перемножения. Устройство работает следуюц.1им образом. При ступенчато.м входном воздействии U. пропорциональном заданному перемецдению, на вход блока 1 ограничения подаются
5 выходные сигналы функционального преобразователя 8 и пропорционального усилителя 9.
На входе блока 1 ограничения формируется разность AL. i иBN - lJn-U), а на входе блока 2 ограничения разность .AL 2
0 u,-U5-U7.
В начальный момент и, следовательно, на выходе блока 1 ограничения будет ностоянный сигнал U|, пронорциональ- ный максимальной (ограничиваемой) задан5 ной величине скорости, на выходе блока 2 01 раниченияпостоянный сигнал IJa,
пропорциональный ограничиваемой величине уско))ения, на выходе блока 3 ограничения - постоянный сигнал .),,,, нропорциональный ограничиваемой величине рывка.
0
Если при заданной величине входного сигнала lJ«x скорость и ускорение достигают О1 раничиваемых ве.личин, т.е. достигает значения Ua, а Us - значения IJi (IJ4 и IJ:, соответственно напряжения, про5 норциональные ускорению и скорости), то на выходе интегратора 4 увеличивается сигнал LU по .липейному закону до тех пор, пока и. не достигнет значения L a (фиг. 3), после чего I .L const и па вып ходе интегратора 5 сигнал Us увеличивается по линейному закону. Когда ДЬ. станет равным нулю, под действием сигнала обратной связи U4 изменяется знак U,i и сигнал LM начинает уменьшаться до нуля. Чтобы сигнал LU стал равным нулю в тот момент,
5 когда Uo достигает ограничиваемого значения I l, передаточный коэффициент k; функционального преобразователя 7 должен быть определен из равенства L l-l. s L)2k7 0 в соответствую1ций момент времени t tii+ti2. Так как в этот момент должно
0 быть - l, 0,5Li2t::, U.2/2U3™, где .i U2/U:)m период диаграммы напряжения, то k7 U2/2U3m. При малых входных воздействиях LU не будет достигать значения U2 и нереключение произойдет при напряжении (фиг. 4). В общем случае для любых значений ljh напряжение U должно определяться по выражению ,5U:imU4signU4, которое реализуется функциональным иреобразователем 7. Коэффициент передачи пропорцио- нального усилителя 12 ,5Ll3m. При равномерном движении , , если скорость достигает ограничиваемого значения, или U5 Ujm const, если . Чтобы процесс протекал оптимально, сигнал Ug должен стать равным Uu в тот момент, когда 1.. Для этого, если ускорение и скорость достигают ограничиваемых величин, передаточный коэффициент ka должен определяться из равенства UBX-U«-U9 UBX-keUi - в момент времени t ti + t2. Так как UBX -УЯ при постоянном рывке в момент времени + t2 должно быть равно 0,5k9lJ|t.3, то ,5k9t3 где
t3 bl+t32 + t,S3.
Периоды диаграммы напряжений равны
t3, tsU2/U:,,,,; t32(LJ,,)/U2 Ui/Г )- IJ /L irr. Следовательно. 1з
b-,/U2 +U2/lJ3m, ,5k9(U,/U2+U2/U3™
. Если только Us не достигает ограничиваемой величины, то напряжение обратной связи должно быть равно UH
0,5k9(U5/Uv + l:5U2/U3,«).
Если не достиг ают ограничений UU и Us, переключение происходит при U.i и4ш и UI, и тогда, так как L sm 0,5y.,mihi + ti.i) U4m/U3, а vU5mU 3m, ТО напряжение обратной связи должно определяться из выражения U 0,5k9(U L/U 4,,, + Us,U4m/U3)
XvL Sm/Ul.
Таким образом, для обеспечения оптимального переходного процесса должны соблюдаться соотношения
0.5k9(U5/U2 + Ur,U2/U3), при Ur,U /U3m,
kMUr,vU5/U 3m, при Ur U2/U:jm, которые pea- ;1изованы функциона;|ьным преобразовате. ICM 8. Коэффициент. ередаЧИ )p U1Oнальных усилителей 14, 20, 24 соответствен О ki-i(),5k.)/U2; k24 0,5k U2/U :(,.i; kio kq/vL.jni. У равляемый ключе «)й элемент 22 замыкает ienb при Uv -U2/U,),,,; ;0, ключевой элемент 16 при U-, L 5/ /из„,0.
Использование елипейных ,иональ- ных реобразователей в ереключаю- щих обрат ых связей обеспечивает автоматический О ТИМаЛЬНЫХ режимов Озиционирова 1ия ри любом входном воздействии, соответствующем заданному перемещению. Этим достигается высокая точность отработки заданного 1еремещения и возможность реализации многоканального управления как при ступенчатом приложении входного воздействия, так и при изменении его во времени по любому закону. Чем диапазон изменения входного воздействия, тем эффективнее устройство с нелинейными переключающими связями по сравнению с устройством, где все обратные связи линейные. Если при определенном входном воздействии UBX переключение в предлагаемом устройстве произойдет при
5
5
0
5
0
5
0
5
значении 0,5U2, то в случае линейной зависимости U от U4/U7 k7U4, где k7 U2/2U3m const, переключение на уменьшение Us произойдет при сигнале U4 U4..,U4m. Полагая линейным изменение во времени UU при неоптимальном режиме {на фиг. 4 показано штриховыми линиями), значение можно найти из равенства ,./2U3. или ...
Следовательно, при U.i 0,5U4m. Увеличение времени цикла опре-- деляется из равенства площадей диаграммы U4 (площадь ОАВ площади OCD): 0,5U4mti 0,, откуда ti.)2ti, т.е. длительность цикла возрастает в 2 раза.
Формула изобретения
Задающее устройство системы у 1рав- ления электро 1риводом, содержа 1ее осле- довательно соединенные три блока чения и три интегратора, выход ервого интегратора соединен с входом третьего блока ограничения, выход второго 1 те рато- рас входом второго блока ()гран 1чепия и выход третьего ()ра - с входом ервого блока , отличающееся те.м, что, с целью ювы пения быстродействия э.- ектрог ривода, введе1 Ы два функ- преобразователя, ервь.Й из ко- включен между выходом первого ип- тегратора и входом второго блока огра- , а второй - между выходом вто- ого и тегратора и входом срвого блока
() |1а П1ЧенИЯ, 1ри этом 1( ре()бразователь образова ервым блоком 1 еремножения, 1ервый вход которого, соединенный с входом первого блока в деле- модуля, с. 1ужит ВХОДОМ ре()бразовате- ля, второй вход iepBoro блока к выходу ервого б. в.де,)ия модуля, с входом 1ервого пропорционального уси.мите.чя, которого является вы.ходом указанного реобраз()вателя, а второй функциональ- H)iH реобра.зователь содержит 1оследова- те.(() соеди енные второй блок , второй 1ропорцио а; ьный усилите., сумматор, исполнительную ер- вого . яемого ключевого элемента и один из входов второго сумматора, ос. вательно соединенные второй блок выделения модуля, блок извлечения квадратного , третий пропорциональный усилитель, третий блок церемножения, исполнитель(ую 1епь второго управляемого ключевого э, мента и второй вход второго сумматора, а также третий сумматор и четвертый () циональный усилитель, входы которых, ()б,е- диненные с входами второго блока пере- М южения и второго блока .модуля и вторь м входом третьего блока iepe- множения, образуют вход второго функц Ю нального преобразователя, выходом которого служит выход второго сумматора, причем второй вход четвертого сумматора подключен к источнику постоянного напряжения, а его выход соединен с цепями управления ключевых элементов, выход четвертого пропорционального усилителя подключен к второму входу первого сумматора, а выход второго блока выделения модуля соединен также с вторым входом второго блока перемножения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с оптимальным управлением | 1987 |
|
SU1534719A1 |
| СПОСОБ ИЗМЕРЕНИЯ СОСТАВЛЯЮЩИХ ПОЛНОГО СОПРОТИВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2154834C2 |
| Задающее устройство системы управления электроприводом | 1980 |
|
SU917290A1 |
| МОДУЛЯЦИОННЫЙ РАДИОМЕТР | 1991 |
|
RU2022286C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОЛНОГО СОПРОТИВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2092861C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СДВИГА ФАЗ ДВУХ СИГНАЛОВ | 1993 |
|
RU2046360C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СДВИГА ФАЗ СИГНАЛОВ С ИЗВЕСТНЫМ ОТНОШЕНИЕМ ИХ АМПЛИТУД | 1993 |
|
RU2039362C1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ КОРНЯ КВАДРАТНОГО ИЗ ПРОИЗВЕДЕНИЯ ДВУХ ВЕЛИЧИН | 1992 |
|
RU2025774C1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ФУНКЦИЙ ARCSIN X, ARCCOS X | 1995 |
|
RU2093887C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2013 |
|
RU2513847C1 |
Изобретение относится к электроте.х- нике и может быть использовано в шахтных подъемниках и экскаваторах. Целью изобретения является повын ение быстродействия электропривода. Устройство содержит функциональные преобразователи 7 и 8. Функциональный преобразователь 7 включен между выходом интегратора 4 и входо.м блока 2 ограничения. Функциональный преобразователь 8 включен между выходом интегратора 5 и входом блока I ограничения. Использование нелинейных функциональных преобразователей в цепях переключающих обратных связей обеснечивает автоматический выбор оптимальных режимов позиционирования при любом входном воздействии. 4 ил. с $9 сл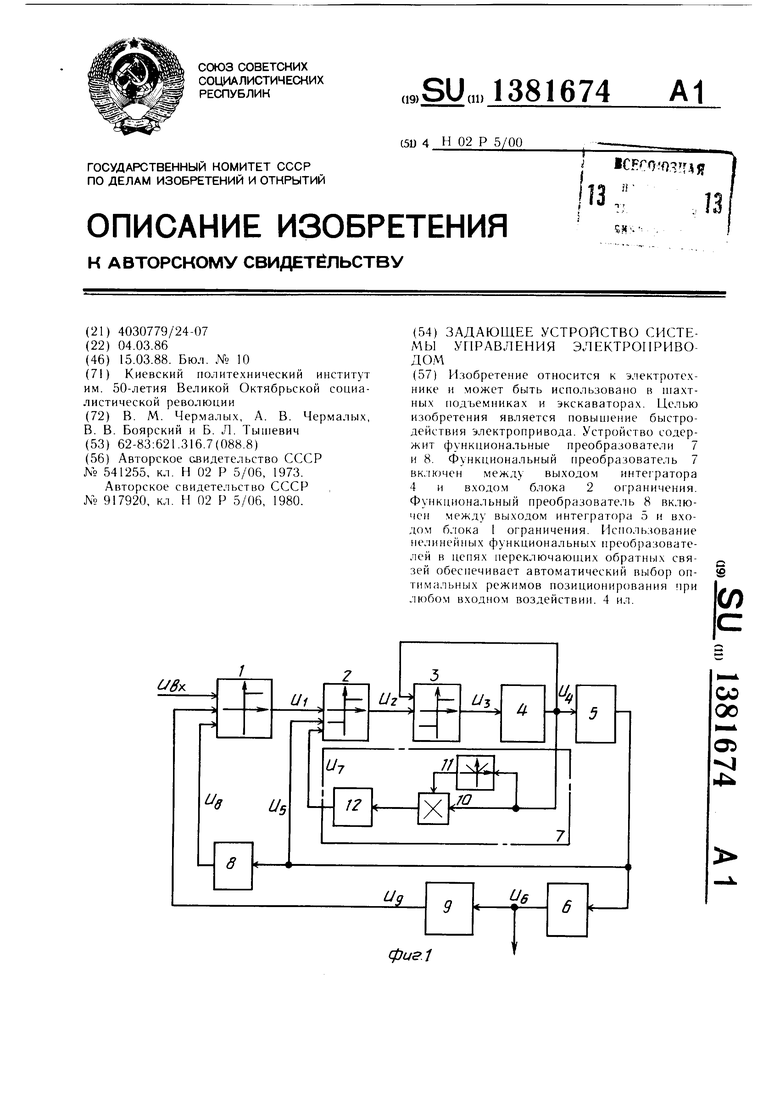
25
Фиг.2.
8
срцг.з
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1974 |
|
SU541255A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для обработки сферических поверхностей | 1980 |
|
SU917920A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
