где t - время работы электропривода в период времени ТОПп
cj
m
eЈ(i + I.) 2 ч J ре
На второй вход блока 12 задания оптийальных уставок подается напряжение, пропорциональное значениям величин Н й, р, , I данного электропри- Иода:
и . и
Значения величин, входящие в приведенное выражение, являются постоян- флм для данного электропривода,
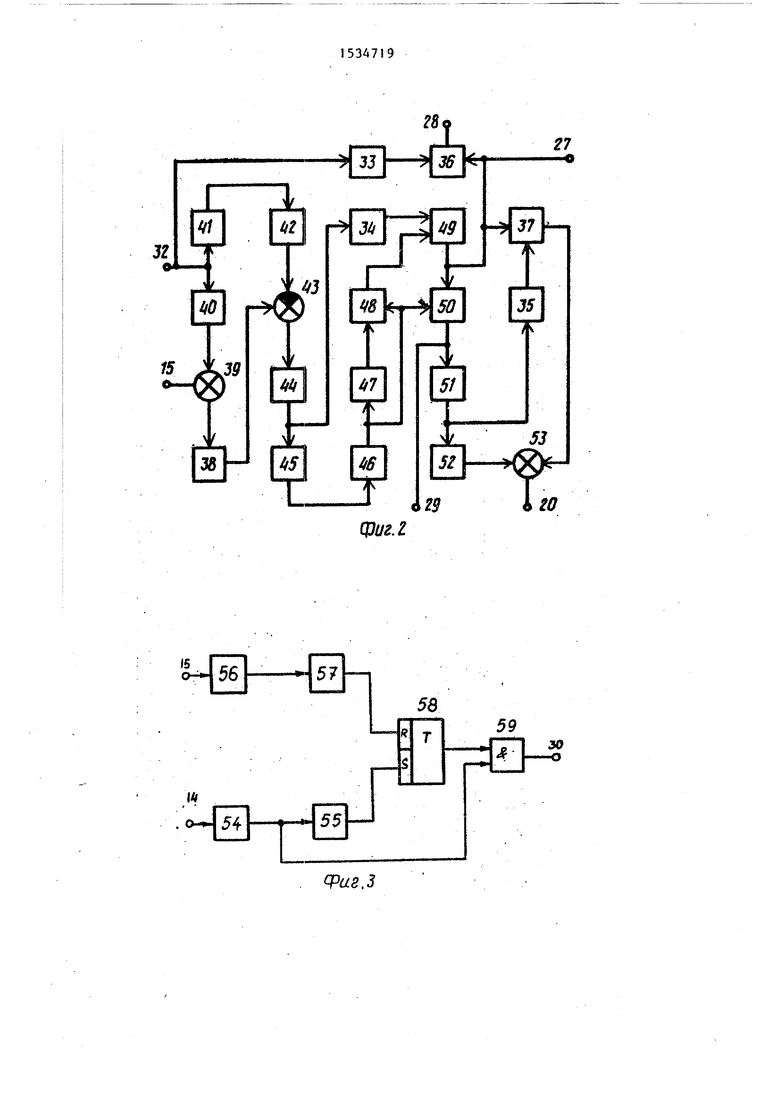
Напряжение U,, я 1) подается на Ьумматор 39 (фиг. 2) блока 12 задания оптимальных уставок. На входы Пропорциональных усилителей 40 и 41 Додается напряжение Uaa Пропорциональные усилители 40 и 41 имеют характеристики ,0, U44 U8Q.K4,
« J v -3.
K4 24
Сумматор 39 имеет характеристику Ubd и,в+ U40 .
Сигнал сумматора 39 подается через блок 38 извлечения квадратного
корня с характеристикой ,-rrUjo на сумматбр 43 - с характеристикой
ffi 42 на который подается напряжение с выхода блока 42 извлечения квадратного корня, на выходе квадратора 44, имеющего характеристику () получается напряжение,, пропорциональное углу поворота е U44 .
Это напряжение через пропорцио- нальный усилитель 45 с характеристи3 I кой , м постУпает
на блок 46 извлечения квадратного корня с характеристикой -fU,,5, на выходе которого формируется напряжение, пропорциональное t . Кроме того, напряжение U44 подается через пропорциональный усилитель 34 с характеристикой U34 4о К34 т на ВТ°Р°Й вход блока 49 деления с характеристикой U,Q , на первый вход кото4 48
рого подается напряжение от блока 46 через квадратор 47 с характеристикой U47 (U,|6 )а и через блок 48 умножения с характеристикой U, ,
На выходе блока 49 деления формируется сигнал, пропорциональный зна- чению рывка U г ра , который подается на второй выход 27 блока 52 задания оптимальных уставок и на первый вход блока 36 деления с характеристикой иэб - U /U4q , на второй вход которого подается сигнал пропорционального усилителя 33 с характеристикой
U ЬТ31 К3 j Выходной сигнал блока 36 деления, пропорциональный величине Pi/p4l подается на третий выход 23 блока 12 задания оптимальных уставок. Напряжение IL9 подается также на блок 50 умножения с характеристикой U5o ° U4) U47 , на выходе которого формируется напряжение, пропорциональное величине ускорения Јjp в преобразователе (U2 UgmeЈm). - Это напряжение также через квадратор 51 с характеристикой U51 (U)1 подается на пропорциональные усилители 35 и 52 с характеристиками U,5 U5, K,
UM U5,Ksa, IC,5- j К5г 2р7 япря жение с выхода пропорционального усилителя 35 подается на первый вход блока 37 деления с характеристикой U37 « Ujj/U , на второй вход которого подается напряжение U4 .
С выхода блока 37 деления напряжение поступает на сумматор 53 с характеристикой U5J U37 + U5U ,
Выходное напряжение сумматора 53 пропорционально значению угловой скорости СОП1, которое подается на первый выход 20 блока 12 задания оптимальных уставок.
При работе электропривода при различных значениях заданного угла поворота Ј-, изменяются и значения рывка РЪ, Так как глубина обратной связи с выхода интегратора 26, при наличии там отрицательного напряжения, подаваемого через пропорциональный усилитель 24 и вентиль 23 на третий вход сумматора 17, определяется коэффициентом передачи усилителя 24, имеющего характеристику U ,
где КЈ4 то при положитель- гирцг,
ном напряжении на выходе интегратора 26 коэффициент обратной связи определяется характеристикой усилителя 24 и отношением pi/pa.. Напряжение, пропорциональное этому сигналу, подается на первый вход блока 21 умножения, на второй вход которого подается напряжение через вентиль 22 с характеристикой
г, U14 при U6, О 71 (.0 при U446 0.
Вентиль 23 имеет характеристику Гиг4 при
0 при U . Отключение электропривода в конце цикла - точка d (фиг. 4) производится ключом 16, имеющим характеристику
U
16
иг) при UJD 1 О при U3 и 0.
Ключ 16, размыкаясь, разрывает связь блока задания оптимальных уставок с сумматором 17, и сигнал задания скорости становится равным нулю. Управление ключом 16 производится Т5 блоком 13 управления, который имеет характеристику
U
«
при
При снятии входного сигнала U, aO на выходе блока 13 управления напряжения становится равным нулю (Uje 0) Входные сигналы U блока 13 управления (фиг. 3) преобразуются в логические уровни формирователя 54 и 56 со следующими характеристиками
1 при (и,
U,
54
U,
56
I I
При Uij Ј О
при /U14/ 0 при UH 0
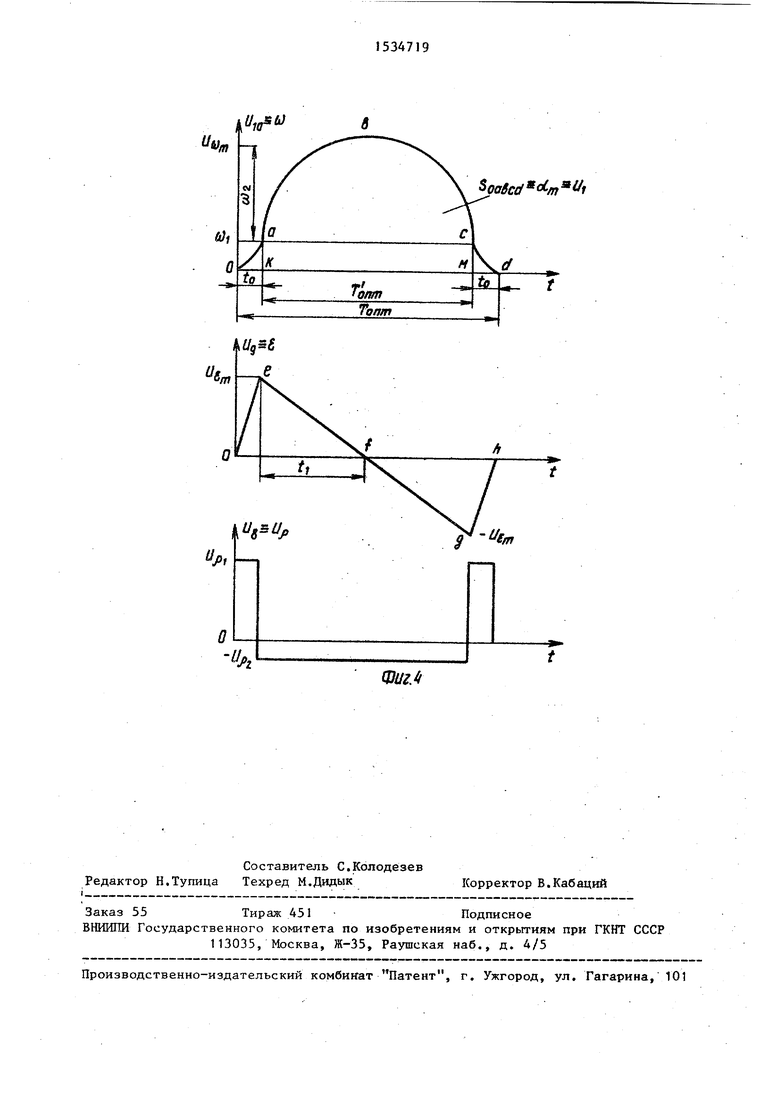
Формирователь 55 выдает импульс по фронту изменения напряжения на его входе с нуля в единицу, а формирователь 57, наоборот, по фронту изменения напряжения с единицы в нуль на его входе.
Элемент И 59 имеет характеристику
«бД и68.
Выходное напряжение сумматора 17 с характеристикой Un U1g -Uw -Uj( -Ujj подается на первый релейный элемент 18 с характеристикой
U
8.
UЈm ПРИ U47 О
О при U г 0
%г при Ui ° - напряжение, пропорциональ- „
г«е uew
ное значению максимального ускорения, и формируется на четвертом выходе блока 12 задания оптимальных уставок. Выходное напряжение сумматора 19 с характеристикой
55
U
и,6- и
-26
подается на второй релейный элемент 25 с характеристикой
0
U,
и
Р
О при
ПРИ U 19 О е5 - J J при в О
-Upt при U,,0,
где Up, , Upt - напряжения, пропорциональные значениям рывков 0, и pi. Текущие значения ускорения с, изменяются по линии oegh (фиг.4) и формируются на выходе интегратора 26, а текущие значения скорости ) изменяются по линии oabcd и формируются на выходе интегратора 10.
Напряжение % через сумматор 3 подается на регулятор 4 частоты вращения и после него на сумматор 5. Напряжение пропорционального усилителя 9 соответствует заданному ус0
5
0
о
5
5
корению электропривода. I
При подаче на вход 15 от блока 11
задания угла поворота напряжения, пропорционального заданному углу поворота вала электродвигателя 1, это напряжение, пропорциональное площади фигуры, ограниченной кривой oabcd (фиг. 4), подается на блок 12 и на блок 13 управления (клемма 15) и далее на формирователь 54 логический уровней, где устанавливается уровень логической единицы. Этот уровень устанавливается также на втором входе элемента И 59. При подаче напряжения с формирователя 54 на вход формирователя 55 на его выходе формируется импульс, который подается на S-вход RS-триггера 53, который устанавливается по выходу в единичное состояние, Поэт ому на выходе соединенного с ним элемента И 59 устанавливается уровень логической единицы Ug 1. При этом ключ 16 замыкается. Напряжение блока 12, пропорциональное COW, с выхода ключа 16 подается через сумма- тор 17 на первый вход, а с четвертого выхода блока 12 на второй вход релейного элемента 13, на выходе которого устанавливается напряжение +Ug . Это напряжение через сумматор 19 подается на релейный элемент 25, на выходе которого устанавливается напряжение Up1 . При этом на выходе интегратора 26 напряжение возрастает по линии ое (фиг. 4), а на соединенном с ним интеграторе 10 - по линии оа.
Напряжение ии 00 с выхода второго интегратора 26 подается через сумматор 3, регулятор 4 частоты вращения, сумматор 5, регулятор 6 тока, блок 2
регулирования напряжения„ датчик 8 тока на электродвигатель 1, При вращении якоря электродвигателя 1 сигнал датчика 7 частоты вращения подается ч(ерез сумматор 3 на регулятор 4 частоты вращения. Сигнал датчика 8 тока глодается на сумматор 5, Напряжение Интегратора 26 подается через усили- ель 24, вентиль 22, блок 21 умноже- ия на вход сумматора 17.
При работе электропривода, когда
Напряжение U™ на выходе у сумматора .
. 7 станет меньше нуля за счет увеличения напряжения U,0 и , соединен- иый с ним нелинейный элемент 18 на своем выходе изменит полярность сигнала на -ИЈ (время t0, фиг. 4), Это напряжение подается на сумматор 39, на его выходе напряжение становится Деньте нуля, и первый релейный эле- нент 25 на своем выходе изменяет напряжение на -Up4. После этого напряже }ше на выходе интегратора 26 уменьшается по линии efg, а на сое- диненном с ним интеграторе 10 измеряется по линии abc (фиг, 4), Раз- он электродвигателя 1 происходит по тинии ab, а замедление по линии be,
Кроме того, напряжение и46инрег- Ьатора 26 через усилитель 24 и вентиль 23 подается на третий вход сумматора 17 после точки f (фиг„ 4), Согда напряжение на выходе сумматора i 7 станет положительным за счет входного сигнала и2Э, релейный элемент 18 изменит выходное Нилряжение на
U
ЈlY
Это напряжение воздействует через сумматор 19 на релейный элемент 25, который на своем выходе устанав- ливает напряжение Up, s и на выходе интегратора 26 (точка g) напряжение начинает уменьшаться, уменьшается также напряжение на выходе интегратора 10 по линии cd. В момент дреме- ни (точка d), когда напряжение на выходе интегратора 10 станет равным нулю, этот уровень напряжения устанавливается на входе 14 блока 13 управления и на выходе формирователя 56 логических уровней также устанавливается логический нуль, при этом формирователь 57 импульса выдает импульс, который переключает RS-триггер 58 с единичного в нулевое состояние, на выходе элемента И 59 уровень сигнала изменяется на противоположный и становится равным нулю При этом ключ 16 размыкается, сигнал на его выходе
0
5
о 5 п ,.
становится равным нулю и электродвигатель 1 останавливается.
Формула изобретения
1, Электропривод с оптимальным управлением, содержащий электродвигатель постоянного тока, подключенный к блоку регулирования напряжения, и последовательно соединенные первый сумматор о регулятор частоты вращения, второй сумматор и регулятор тока, выход которого подключен к входу блока регулирования напряжения, датчик частоты вращения и датчик тока якоря, выходы которых подключены к входам соответственно первого и второго сумматоров , первый пропорциональный усилитель, первый интегратор, выход которого соединен с входом первого сумматора, а вход первого интегратора соединен с входом первого пропорционального усилителя, блок задания угла поворота, блок задания оптимальных уставок, блок управления, первый вход которого соединен с выходом первого интегратора, а второй вход блока управления соединен с входом блока задания оптимальных уставок и выходом блока задания угла поворота, отличающийся тем, что, с целью повышения КПД s в него дополнительно введены третий сумматор, первый релейный элемент, ключ, четвертый сумматор, первый из двух входов которого соединен с входом первого интегратора, а второй вход соединен с выходом первого релейного элемента, два входа которого соединены с выходом третьего сумматора и первым выходом блока задания оптимальных уставок, первый и второй входы третьего сумматора соединены соответственно с выходом первого интегратора и выходом ключа, умножитель, первый диод, второй диод, второй пропорциональный усилитель, вход которого соединен с входом первого интегратора,, а выход соединен с анодом первого и катодом второго диодов, катод и анод которых соединены соответственно с первым входом умножителя и третьим входом третьего сумматора, четвертый вход третьего сумматора соединен с выходом умножителя, второй релейный элемент, второй интегратор, выход которого соединен с входом первого интегратора8 и вход второго интегратора соединен с выходом второго релейного элемента, два входа которого соединены соответственно с выходом четвертого сумматора и вторым выходом блока задания опти- мальных уставок, третий и четвертый выходы которого соединены соответственно с вторым входом умножителя и первым входом ключа, второй вход которого соединен с выходом блока уп- равления.
2. Электропривод по п. 1, о т - личающийся тем, что блок задания оптимальных уставок содержит первый пропорциональный усилитель, второй пропорциональный усилитель, третий пропорциональный усилитель, первый блок деления, второй блок деления, а также последовательно соединенные первый блок извлечения квад- ратного корня, первый сумматор, четвертый пропорциональный усилитель, пятый пропорциональный усилитель, второй блок извлечения квадратного корня, второй сумматор, первый квад- ратор, шестой пропорциональный усилитель, третий блок извлечения квадратного корня, второй квадратор, первый блок умножения, третий блок деления, второй блок умножения, третий квадратор, седьмой пропорциональный усилитель, третий сумматор, второй вход которого соединен с выходом второго блока деления, первый вход которого через третий пропорциональный усилитель соединен с выходом третьего квадратора, а второй вход соединен с входом первого блока деления и выходом третьего блока деления, второй вход которого соединен с выходом второго пропорционального усилителя,
вход которого соединен с выходом первого квадратора, вход второго квадратора соединен с вторым входом первого блока умножения и вторым входом второго блока умножения, выход первого блока извлечения квадратного корня подключен к второму входу второго сумматора, второй вход первого сумматора соединен с первым входом блока задания оптимальных уставок, подключенного вторым входом к входу первого пропорционального усилителя и входу четвертого пропорционального усилителя, четвертым выходом - к выходу третьего сумматора, первым выходом - к выходу второго блока умножения, третьим выходом - к первому входу первого блока деления, второй вход которого соединен с выходом первого пропорционального усилителя, а выход - с вторым выходом блока задания оптимальных уставок.
3, Электропривод по п. 1, отличающийся тем, что блок управления содержит первый формирователь логических уровней, первый формирователь импульса, а также последовательно соединенные второй формирователь логических уровней, второй формирователь импульса, RS-триггер, элемент И, выход которого соединен с выходом блока управления, соединенного первым входом с входом второго формирователя логических уровней, вторым входом через первый формирователь логических уровней к второму входу элемента И и входу первого формирователя импульса, выход которого соединен с вторым входом RS-триггера.
10
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Устройство для точного останова электропривода | 1984 |
|
SU1182618A1 |
| Электропривод с оптимальным управлением | 1985 |
|
SU1339854A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Задающее устройство системы управления электроприводом | 1986 |
|
SU1381674A1 |
| Устройство для защиты электрической сети от повреждений | 1989 |
|
SU1656624A2 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Цель изобретения - повышение КПД. Уо содержит первый интегратор 10, блок 12 задания оптимальных уставок. Выход второго интегратора 26 соединен с входом первого интегратора 10, а первый вход блока 1 управления соединен с входом блока 12 задания оптимальных установок. В данном устройстве обеспечивается формирование оптимальной тахограммы изменения скорости в зависимости от заданного угла поворота. 2 з.п. ф-лы, 4 ил.
54
55
Фиг.З
cpuz.z
%
V
0
to
Ua2t
ЗоаЛс таЦ
V
TL
опт
to
ФМ.4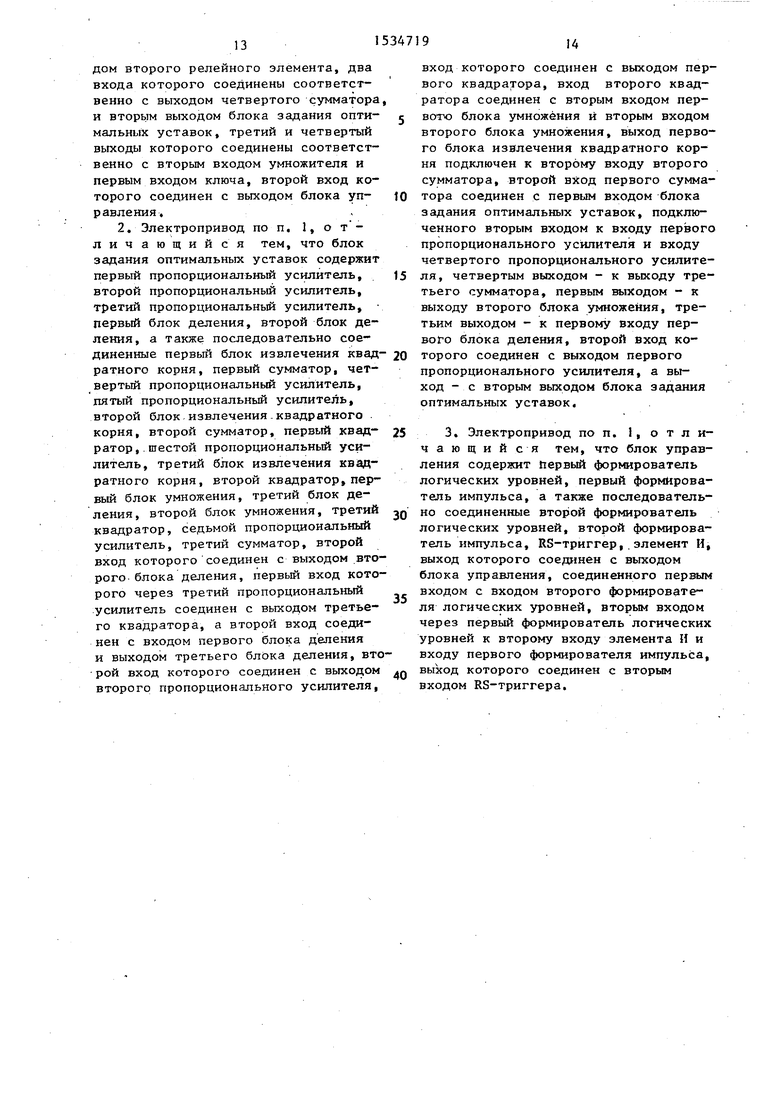
| Электропривод постоянного тока | 1982 |
|
SU1022275A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с оптимальным управлением | 1985 |
|
SU1339854A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
