N - число отсчетов, по которым усредняется погрешность;
К - число усредненных отсчетов, 50 по которым находим среднеквадратичную погрешность 5
X
,, ьг УМ - УМ
ь) у; . - отсчеты соответственно входного и выходного сигналов. Так как в прототипе зависимость аппроксимирующего сигнала от входно,
где Е - модуль приращения аппроксимирующего напряжения в прототипе.
При этом из выражения (3) тг
т л ч
(5)
при Ч2л 2
Выражение (5) показывает, что при усреднении по соседним отсчетам для низкочастотных сигналов (т.е.
когда справедливо предположение о линейной зависимости погрешности от номера отсчета в усредняемой группе отсчетов) среднеквадратичная усредненная погрешность аппроксимации в прототипе также не зависит от усредг нения, а зависит от величины модуля приращения, уменьшать которую можно лишь до некоторого предела.
В предлагаемом дельта-модуляторе уменьшение среднеквадратичной усредненной погрешности связано с усреднением, а не с уменьшением собственно погрешности аппроксимации,
Важным параметром, характеризующим дельта-модулятор, является отношение сигнал - шум на выходе, т.е. отношение дисперсии (мощности) входного сигнала к дисперсии погрешности аппроксимации входного сигнала. Однако практически повьш1ение отношения сигнал - шум важно и необходимо не в собственно дельта-модуляторе, а на выходе системы, в которой работает дельта-модулятор. При этом аппроксимирующие сигналы дельта-модулятора фильтруются фильтром нижних частот или полосовым фильтром, или интегрируются. Фильтры и интегратор являютс усредняющими устройствами, поэтому отношение сигнал - шум на выходе системы будет определяться не среднеквадратичной погрешностью аппроксимации входного сигнала дельта-модулятора, а среднеквадратичной усреднен- ной -погрешностью дельта-модулятора. Таким образом, лучшим (обеспечивающим большее отношение сигнал - шум
в системе) будет тот дельта-модуля
тор, у которого меньше среднеквадратичная усредненная погрешность аппроксимации. Возможность уменьшения среднеквадратичной усредненной погрешности путем усреднения мгновенно погрешности делает возможными и другие способы обработки аппроксимирующего напряжения (т.е. расширяет область применения), при которых мгновенные значения погрешности аппроксимации предварительно усредняются.
Например, при дельта-модуляции периодического или повторяющегося сигнала (например, квазидетерминирован- ного) может проводиться накопление (т.е. усреднение) соответствуюгцих одноименных отсчетов. Кроме того, что аппроксимирующее напряжение дельта-модулятора практически всегда ус
Q
n 5
О
0
0
5
редр1яется (фильтруется) , тактовая частота генератора тактовых импульсов обычно выбирается намного большей верхней частоты входного сигнала, поэтому выражения (4) и (5) практически всегда справедливы.
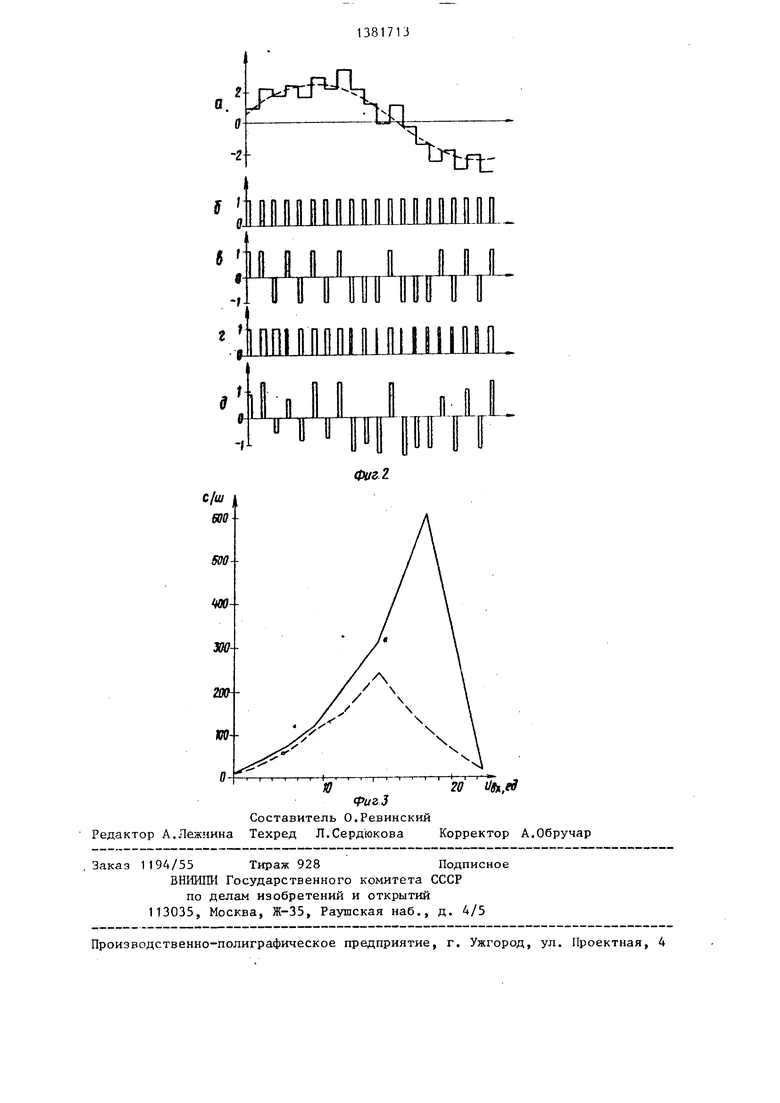
Дельта-модулятор работает следующим образом.
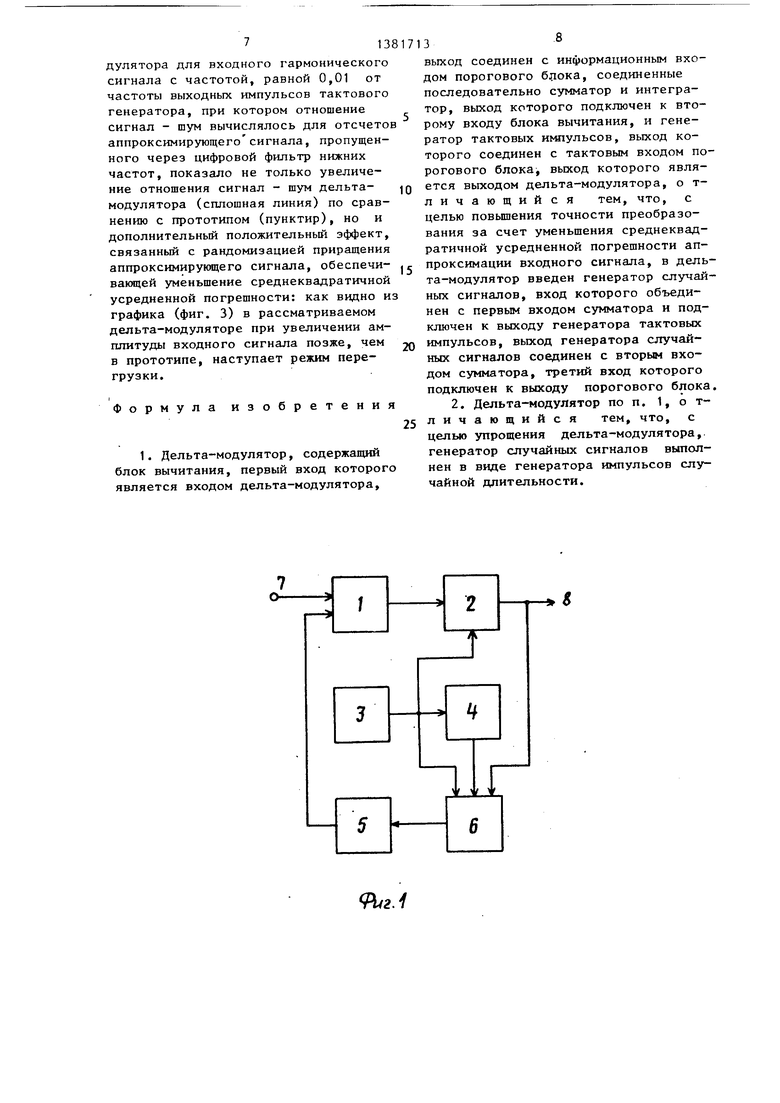
Входной аналоговый сигнал ((Ьиг.2я) с входа 7 поступает на первый вход вычитающего блока 1, на второй вход которого Поступает аппроксимирующий сигнал (фиг. 2а, пунктир) с выхода интегратора 5. Разностный сигнал с выхода вычитающего блока 1 поступает на вход порогового блока 2. Тактовые импульсы (фиг. 26) с выхода генератора 3 поступают на соответствующие входы порогового блока 2, генератора А случайных сигналов и сумматора 6. В момент поступления тактового импульса на тактовый вход порогового блока 2 на его выходе и соответственно на входе сумматора 6 появляется импульс (фиг. 2в) постоянной амплитуды, полярность которого соответствует полярности разностного сигнала. Каждому тактовому импульсу на входе генератора 4 соответствует выходной сигнал со случайными параметрами, например импульс случайной длительности (фиг. 2г), Сигнал с выхода генератора 4 поступает на вход сумматора 6. Таким образом, на каждом такте работы генератора 3 тактовых импульсов сумма трех сигналов (фиг. 2д), поступающая с выхода сумматора 6 на вход интегратора 5, вызывает приращение аппроксимирующего сигнала на выходе интегратора 5. На некотором такте работы это приращение равно интегралу по времени за период работы генератора 3. На фиг. 2б-д форма сигналов изображена условно, как пример реализации. Кроме того, сигнал суммы (фиг, 2д) трех сигналов условно изображен как импульс переменной амплитуды. Действительная форма импульса может быть различной, т.е. определяется суммой соответствующих входных сигналов сумматора 6. Существенным дЛ я входных сигналов сумматора 6 является то, что они интегрируются, причем интеграл за период работы генератора 3 от тактового сигнала постоянен; от выходного сигнала порогового блока 2 постоянен по модулю, но может менять
51381713
знак; от выходного сигнала со случайными параметрами имеет случайньй характер.
Таким образом, приращение аппроксимирующего сигнала на i-м такте работы генератора 3 равно интегралу по времени за период работы генератора
3 тактовых импульсов:
т
D,, HKi-tsgn(x,-yi, )l-f,(t) -fо
-t- , (t)+K f, (t).t.
где sgn
(г)( ° 1-1, Z 0,
входной сигнал дельта-модулятора на i-M тактеi выходной сигнал интегратора 20 5 на i-M такте работы (аппроксимирующий сигнал)i совместный коэффициент передачи сумматора 6 и интегратора 5 для соответствующе- 25 го сигнала на входе сумматора 6.
Далее сигналы представляются форме импульсов:
f (t) Hf e - 0, иначе
где п 0, 1, 2,
Л
пТ+ -С ,
е
- соответственно амплитуда
длительность импульса.
Индекс 1 2, 3, 4 соответствует обозначению функциональных блоков на фиг. 1.
Таким образом, на каждом такте работы устройства хотя бы один параметр, например длительность импульса выходного сигнала генератора 4, имеет случайное значение, причем количество случайных параметров этого , сигнала и законы их распределения выбираются исходя из конкретных требований к устройству. В качестве генератора 4 случайных сигналов может быть использован ,например, генератор импульсов случайной длительности с равномерным распределением.
Плотность распределения длительности импульсов
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель среднеквадратического значения скорости случайного процесса | 1985 |
|
SU1280393A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЧЕРНО-БЕЛЫХ ИЗОБРАЖЕНИЙ | 2007 |
|
RU2340938C1 |
| Устройство для передачи сообщений с адаптивной дельта-модуляцией | 1981 |
|
SU1025011A1 |
| Адаптивный дельта-модулятор со слоговым компандированием | 1991 |
|
SU1785078A1 |
| Устройство для определения коэффициента затухания узкополосного случайного процесса | 1982 |
|
SU1072067A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ АППРОКСИМАЦИИ ПРИ ВЫДЕЛЕНИИ ПОЛЕЗНОГО СИГНАЛА В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2013 |
|
RU2541919C1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ ПОЛЕЗНОГО СИГНАЛА НА ФОНЕ ШУМОВ С МИНИМИЗАЦИЕЙ КОНЦЕВЫХ ЭФФЕКТОВ СПОСОБОМ КУСОЧНОГО РАЗМНОЖЕНИЯ ОЦЕНОК | 2007 |
|
RU2365980C1 |
| Трансверсальный фильтр | 1981 |
|
SU1083344A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ТРЕНДА МЕТОДОМ СКОЛЬЗЯЩЕГО РАЗМНОЖЕНИЯ ОЦЕНОК ТРЕНДА ЕГО ЕДИНСТВЕННОЙ ИСХОДНОЙ РЕАЛИЗАЦИИ ("КРОТ") И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2257610C1 |
| СИСТЕМА ДЛЯ ПЕРЕДАЧИ СИГНАЛОВ С ДЕЛЬТА-МОДУЛЯЦИЕЙ | 1991 |
|
RU2025045C1 |
Изобретение относится к автоматике и вычислительной технике. Его использование в системах передачи информации с дельта-модуляцией позволяет повысить точность преобразования за счет уменьшения среднеквад ратичной усредненной погрешности аппроксимации входного сигнала. Дельта- модулятор содержит блок 1 вычитания, пороговый блок 2, генератор 3 тактовых импульсов, интегратор 5 и сумматор 6. Благодаря введению генератора 4 случайных сигналов обеспечивается повышение отношения сигнал - шум аппроксимирующего сигнала дельта-модулятора. 1 з.п. ф-лы, 3 ил. с с
Р(С,).
1
е
4MUH
4 маис
1-14 М«КС - Ь А,ун
О, иначе
K AsCj-KiA i К,А,
KjAjCi+KjAi ;/; . К,А,
при
р(и
прич
35
ны
вис тор ти нен ния уме нен сиг метр ксим такж тов треб со на е ми, носи ния печи М{х чайн
Остальные обозначения раскрыты в выражении (6).
Работа дельта-модулятора и устройства-прототипа описывается выражением
t, s8 ( ) (
где JL - модуль приращения аппроксимирующего сигнала, яричем для прототипа амплитуда приращения аппроксими°рующего сигнала - постоянна. Для рассматриваемого дельта-модулятора f и - случайная величина, закон распределения которой определя ется выражением (6) и законом распределения (7) случайного параметра генератора 4 случайных сигналов. В случае выполнения генератора 3 в виде генератора импульсов случайной дли- тельности и - случайная величина,распределенная по закону, соответствующему распределению (7):
, Л
(7)
р(и)
КС у
Елл„н и Е „,,(9)
причем Е
5
0
5
5
0
. и Е „„«могут быть найдены из выражений (6) и (7).
Конкретный закон распределения зависит от требований к дельта-модулятору и от условий работы, в частности от вида входных сигналов. Применение равномерного закона распределения длительности импульсов позволяет уменьшить среднеквадратичную усредненную погрешность аппроксимирующего сигнала. При этом согласно (6) параметры распределения приращения аппроксимирующего сигнала могут изменяться также с помощью изменения коэффициентов усиления. Например, для упрощения требований к генератору 4 импульсов со случайной длительностью импульсы на его выходе могут быть однополярны- ми, а для получения симметричного относительно О распределения приращения аппроксимирующего нарряжения обеспечивают Kj и iKj) ,где М{х } - математическое ожидание случайной величины X.
Моделирование работы устройства- прототипа и предлагаемого дельта-мо 13817
дулятора для входного гармонического сигнала с частотой, равной 0,01 от частоты выходных импульсов тактового генератора, при котором отношение сигнал - шум вычислялось для отсчетов аппроксимирующего сигнала, пропущенного через цифровой фильтр нижних частот, показало не только увеличение отношения сигнал - шум дельта- Q модулятора (сплошная линия) по сравнению с прототипом (пунктир), но и дополнительный положительньи эффект, связанный с рандомизацией приращения аппроксимирующего сигнала, обеспечи- . вающей уменьшение среднеквадратичной усредненной погрешности: как видно из графика (фиг. 3) в рассматриваемом дельта-модуляторе при увеличении амплитуды входного сигнала позже, чем -jn в прототипе, наступает режим перегрузки.
Формула изобретения
8
5
выход соединен с информационным входом порогового блока, соединенные последовательно сумматор и интегратор, вькод которого подключен к второму входу блока вычитания, и генератор тактовых иъшульсов, выход которого соединен с тактовым входом порогового блока, выход которого является выходом дельта-модулятора, о т- личающийся тем, что, с целью повышения точности преобразования за счет уменьшения среднеквадратичной усредненной погрешности аппроксимации входного сигнала, в дельта-модулятор введен генератор случайных сигналов, вход которого объединен с первым входом сумматора и подключен к выходу генератора тактовых импульсов, выход генератора случайных сигналов соединен с вторым входом сумматора, третий вход которого подключен к выходу порогового блока. 2. Дельта-модулятор по п. 1, о т- личающийся тем, что, с целью упрощения дельта-модулятора, генератор случайных сигналов вьтол- нен в виде генератора импульсов случайной длительности.
9цгЛ
I ill
iuu nn 1
nilillilP
4/л,я7
Составитель О.Ревинский Редактор А.Лежиина Техред Л.Сердюкова Корректор А.Обручар
Заказ 1194/55 Тираж 928Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
nilillilP
Y/
| Левин Л.С., Плоткин М.А | |||
| Цифровые системы передачи информации | |||
| М.: Радио и связь | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Bell System Technical Journal, 1972, V | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Разборная кровать с деревянной рамой | 1924 |
|
SU1293A1 |
| Устройство для передачи сигналов с дельта-модуляцией и мгновенным компандированием | 1977 |
|
SU641648A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
