N)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления реверсивным механизмом | 1983 |
|
SU1158972A1 |
| Устройство для пуска многодвигательного электропривода | 1986 |
|
SU1390753A1 |
| ЭЛЕКТРОПРИВОД УСТРОЙСТВА ТРАНСПОРТИРОВКИ | 1991 |
|
RU2063343C1 |
| Устройство для дистанционного управления раздаточной тележкой | 1988 |
|
SU1667015A1 |
| Устройство для управления спаренными стрелочными приводами | 1990 |
|
SU1794745A1 |
| Устройство для управления реверсивным электродвигателем | 1981 |
|
SU993419A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1981 |
|
SU1171758A2 |
| Устройство для сигнализации о состоянии исполнительного механизма | 1982 |
|
SU1046757A1 |
| Устройство для управления исполнительным органом | 1982 |
|
SU1149217A1 |
| Устройство для управления технологической линией | 1986 |
|
SU1381426A1 |
Изобретение относится к системам автоматического управления и может быть использовано для управления реверсивным механизмом, имеющим несколько фиксированных положений. С целью повышения надежности в устройство введены дополнительные замыкающие контакты. Устройство содержит шины 1 питания переменного тока, п замыкающих кнопок 2 управления, и замыкающих контактов 3 датчиков положения, п - 1 диодов 4, диоды 5 питания цепей реле 6 и 7 реверса, размыкающие контакты 8 и 9 замыкающие контакты 10 и 11 соответственно реле 6 и 7 реверса, обмотки 12 и 13 управления, замыкающие контакты 14 и 15 соответственно обмоток 12 и 13 управления, источник 16 питания обмоток 12 и 13 управления и .дополнительные замыкающие контакты 17 и 18 реле реверса. При установлении механизма из второго положения в четвертое через замкнувщутося кнопку 2 четвертого положения, через диоды 4, замкнутый контакт датчика 3 второго положения, через диод 5 на реле 7 реверса подается переменное напряжение с шин 1. При этом контакты 17 и 11 реле замыкаются, а контакт 8 размыкается. Напряжение fc источника 16 питания обмоток управления подается на обмотку 13 управления. Механизм начинает движение в сторону четвертого датчика. При его замыкании переменное напряжение подается на оба реле 6 и 7 реверса, которые в свой очередь срабатывают и разрывают контактами 8 и 9 цепь питания обмоток управления. Контакты 17 и 18 реле 6 и 7 реверса служат дпя повьшения надежности уст- ройства, отключая полностью напряжение с обмоток управления при снятии переменного тока с шин 1. 1 ил. «ч ф (Л с: ггт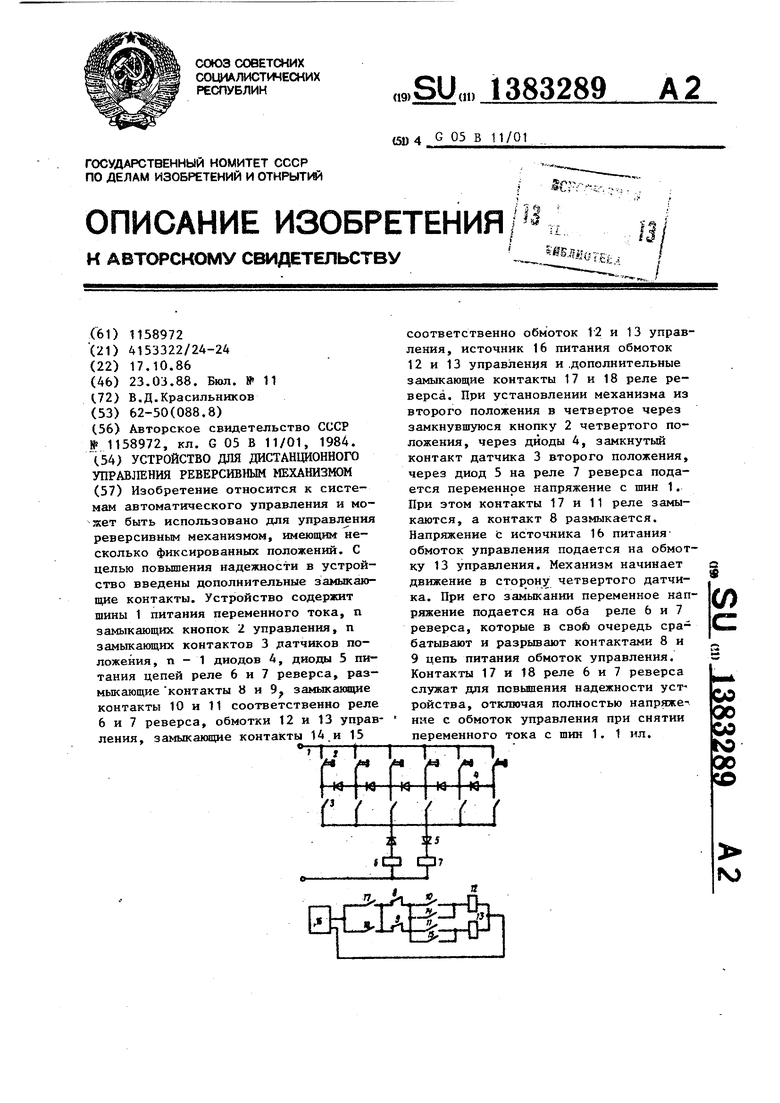
Изобретение относится к системам автоматического управления, может быть использовано для управления ре- BepcuBHbiM механизмом, имеющим не- сколько фиксированных положений, и является усовершенствованием известного устройства по основному авт. св. № 1158972,
Цель изобретения - повышение на- дежности устройства.
На чертеже представлена электрическая схема устройства.
Устройство содержит шины 1 питания переменного тока, п замыкающих кнопок 2 управления, п замыкающих контактов 3 датчиков положения, п-1 диодов 4, диоды 5 питания цепей реле 6 и 7 реверса, размыкающие контакты 8 и 9 замыкающие контакты 10 и 11 соответственно реле 6 и 7 реверса, обмотки 12 и 13 управления, замыка1о- щие контакты 14 и 15 соответственно обмоток 12 и 13 управления, источник
16питания обмоток 12 и 13 управлени и дополнительные замыкающие контакты
17и 18 реле реверса. Замыкающие кнопки 2 управления
соединены одним вьшодом с шиной 1 питания переменного тока, а другим - с одним из вьюодоБ замыкающих контактов датчиков 3 положения,
Одни выводы обмоток реле 6 и 7 реверса соединены с другой шиной 1 питания переменного тока, а вторые выводы - один через диод 5 в проводящем напряжении, а другой через друго диод 5 в непроводящем напряжении соединены с объединенными вторьми вьшо- дами замыкающих контактов 3 датчиков 3 положения.
Первые выводы замыкающих контакто 3 датчиков положения каждой предыдущей кнопки 2 управления, соединены с каждой последующей через диод 4. Дио ды 4 образуют последовательную цепочку рдного направления проводимости. Обмотки 12 и 13 управления одним выводом соединены с шиной источника 16 питания обмоток управления, а другим выводом чер ез последовательно включенные замыкающие 10 и 11 и размыкающие 8 и 9 контакты одного из реле 6 и 7 реверса соединены с другой шиной источника 1 питания обмоток управления, размьжаю щие контакты 8 и 9 обоих релб 6 и 7 реверса включены параллельно, а замыкающие контакты 11 и 15 каждой из
5 0
5
0
5 О
0
5
обмоток управления шунтируют замыкающие контакты 10 и 11 реле реверса в цепи другой обмотки управления.
Между размыкающими контактами 8 и 9 реле 6 и 7 реверса и другой щиной источника 16 питания обмоток.управления введены дополнительные замыкающие контакты 17 и 1В реле реверса, соединенные между собой параллельно.
Устройство работает следующим образом.
В исходном состоянии один из дат- чиков положения, например второй, замкнут в результате соответствующий ему второй контакт 3 также замкнут.
Переменное напряжение с шин 1, поступающее через вторую кнопку 2 управления, второй замкнутый контакт 3 и диоды 5, подается на оба реле 6 и 7, в этом случае контакты 17 и 18 замкнуты, а контакты 8 и 9 разомкнуты, и питание обмоток 12 и 13 от источника 16 не осуществляется. При нажатии любой из кнопок 2, например четвертой, вторая кнопка 2 размыкается. В результате переменное напряжение через четвертую замкнутую кнопку 2j диоды 4. и 5 поступает на реле 7 реверса, при этом реле 6 реверса обесточено.
Размыкаются контакты 10 и 17, а контакт 9 замыкается, и напряжение с источника 16 питания обмоток управления подается на обмотку 13 управления.
Реверсивньй механизм начинает движение от положения, соответствующего замкнутому состоянию замыкающих контактов 3 второго датчика положения, в сторону четвертого датчика положения. Напряжение с шин 1 питания переменного тока начинает поступать и на другое реле 6 реверса, при этом размыкающие контакты 8 и 9 размыкаются, механизм останавливается. При снятии напряжения с шин 1 з амыкающие контакты 17 и 18 размыкаются, разрывая цепь питания обмоток управления с источника 16,
Устройство может быть составлено для любого количества фиксирующих положений механизма. Работа, устройства аналогична при выборе других положений, Формула изобретения
Устройство для дистанционного управления реверсивным механизмом по авт. ев, 1158972, отличаю-.
313832894
щ е е с я тем, что, с целью повьпйе- бой параллельно и включенные между ния надежности устройства, введены размыкающими контактами реле реверса дополнительные замыкающие контакты и шиной источника питания обмоток
реле реверса, соединенные между со-, управления.