Изобретение относится к лесопильному оборудованию и может быть использовано в деревообрабатывающей промышленности.
Цель изобретения - повышение надежности работы, снижение нагрузок от сил резания.
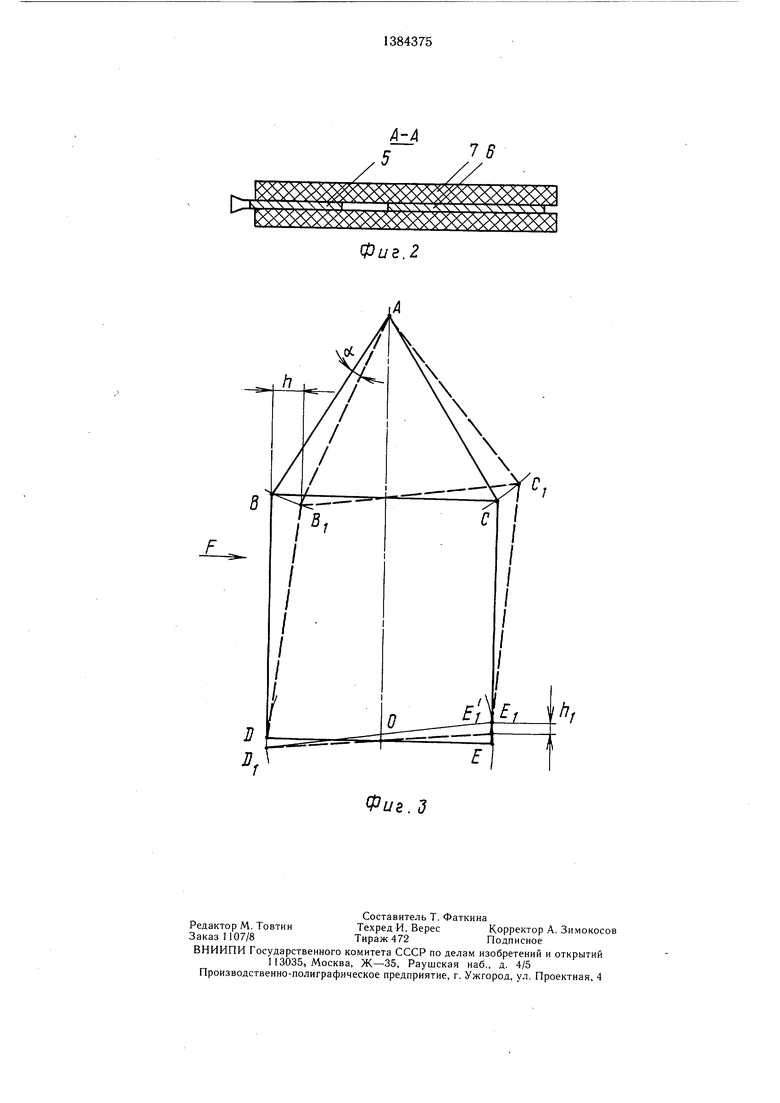
На фиг. 1 изображен механизм резания лесопильной рамы, обш,ий вид; на фиг. 2- сечение А-А на фиг. 1; на фиг. 3 - геометрический анализ действующ,их сил механизма резания.
Механизм резания лесопильной рамы включает верхний захват 1 с натяжным устройством, нижний захват 2, верхнюю 3 и нижнюю 4 пластины, рамную пилу 5, установленный на ней направляющий нож 6, верхние и нижние секционные направляю- ш,ие 7. В полотне направляюш,его ножа выполнены сквозные высечки 8.
Пластина 3 шарнирно крепится к захвату 1 в точке А, а пластина 4 - к захвату 2 в точке 0. Пила 5 и нож 6 шарнирно крепятся к пластинам 3 и 4 в точках ВСЕ и Д, образуя при этом устойчивый параллелограмм. При этом точка О лежит с точками Д и Е на одной прямой, а точки А, В и С образуют вершины треугольника ABC, основание ВС которого является одной из сторон параллелограмма. За счет этого параллелограмм ВСЕД приобретает устойчивость.
Механизм резания размешается в пильной рамке (не показано) и натягивается натяжными устройствами через захваты 1 и 2.
Механизм резания работает следующим образом.
В процессе работы пильное полотно 5 нагревается. При этом полотно пилы удлиняется и сила натяжения пилы ослабевает. При этом рычаг ДЕ (фиг. 3) выходит из равновесия, пластина 4 поворачивается вокруг оси О и сила натяжения пилы восстанавливается.
С другой стороны, при пилении древесины возникает сила сопротивления резанию, которая действует в вертикальной и горизонтальной плоскостях. Горизонтальная составляющая сил резания F воздействует на пилу 5 в направлении подачи материала и вызывает перемещение ее на величину h. При этом пластина 3 поворачивается относительно оси А, а лласти- на 4 относительно оси 0. Принимаем во внимание, что жесткость пилы 5 во много раз больше, чем жесткость направляющего ножа 6. треугольник ABC под дейст0
0
5
0
5
0
5
Бием силы F порернется на La, при этом точка В должна переместиться в точку В, точка С займет положение Ci, а так как мы имеем систему параллелограмма, то точка Д займет положение Ди а точка Е должна занять положение ЕЬ Но в данном случае точка О, лежащая на прямой ДЕ, остается неподвижной и точка Е должна находиться в точке EI, А, для этого стороне параллелограмма СД, т. е. направляющему ножу 6, необходимо удлинение на величину EiE i Ь, что и происходит в данном случае за счет высечек. Это вызовет пропорциональное увеличение натяжения системы пила - направляющий нож. При уменьшении горизонтальной силы резания пила 5 возвращается в исходное положение.
Сила натяжения в захвате распредеяет- ся в пиле 5 и направляющем ноже б обратно пропорционально соотнощению плеч ДО и ОЕ в нижней пластине 4 и BO| и OiC в верхней пластине 3. Точка Oi есть проекция точки А на прямую ВС. При действии продольных сил натяжения направляющей нож 6 за счет высечек 8 упруго удлиняется.
После прохождения через пильное полотно 5 распиливаемый материал входит пропилами в направляющие ножи 6. Возникающие при резании боковые силы воспринимаются не пилами, а направляющими ножами. Это позволяет исключить боковые воздействия на пилы и повысить точность пиления.
Формула изобретения
Механизм резания лесопильной рамы, включающий рамные пилы, снабженные нижними и верхними захватами, выполненными с натяжными устройствами, секционные нижние и верхние направляющие и расклинивающие ножи, отличающийся тем, что, с целью повышения надежности работы, захваты рамных пил снабжены шарнирно закрепленными на них пластинами, на которых шарнирно установлены рамные пилы и расклинивающие ножи, причем рамные пилы, расклинивающие ножи и пластины образуют параллелограммы, а пластины нижних или верхних захватов выполнены в виде треугольников, в углах которых размещены шарниры крепления пил, ножей и захватов, при этом в полотне расклинивающего ножа выполнены сквозные отверстия.
Xl-4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для натяжения рамных пил | 1990 |
|
SU1782725A1 |
| Рамная пила | 2020 |
|
RU2750822C1 |
| УЗЕЛ РЕЗАНИЯ ЛЕСОПИЛЬНОГО СТАНКА | 2014 |
|
RU2567513C1 |
| Лесопильная рама | 1985 |
|
SU1296408A1 |
| ЛЕСОПИЛЬНАЯ РАМА С ЭКСЦЕНТРИКОВЫМ МЕХАНИЗМОМ КАЧАНИЯ ПИЛЬНОЙ РАМКИ | 2014 |
|
RU2557178C1 |
| УЗЕЛ РЕЗАНИЯ ЛЕСОПИЛЬНОГО СТАНКА | 2011 |
|
RU2452615C1 |
| Устройство для распиловки лесоматериалов | 1990 |
|
SU1717344A1 |
| Пильная рамка лесопильной рамы | 1985 |
|
SU1386450A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ, ЗАКРЕПЛЕНИЯ И НАТЯЖЕНИЯ ПИЛ В ЛЕСОПИЛЬНОЙ РАМЕ | 1927 |
|
SU16394A1 |
| Механизм резания лесопильной рамы | 1981 |
|
SU982905A1 |
Изобретение относится к лесопильному оборудованию и может быть использовано в деревообрабатывающей промышленности. Цель изобретения - повышение надежности работы и снижение максимальных нагрузок от сил резания. Пила 5 и направляющий нож 6 крепятся на пластинках 3 и 4 захватов 1 и 2. Точки крепления верхней пластины образуют треугольник АВС а нижней лежат на одной прямой. Под действием сил резания пила 5 отклоняется, а направляющий нож удлиняется при этом на необходимую величину. При нагреве пилы 5 она удлиняется, пластина 4 поворачивается относительно точки О и сила натяжения пилы восстанавливается, 3 ил. сл с 00 оо ел Фиг. 7
Фиг.2
| Шпиндель хлопкоуборочного аппарата | 1980 |
|
SU925265A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
