устройстве установлено электрическое сопротивление 19 с возможностью скольжения по подпружиненному электрическому контакту 20, смонтированному внутри камеры регулятора, причем электрический контакт и электрическое сопротивление связаны линиями 21 связи с блоком 22 управления. Совмещение функций регулятора давления и элемента контроля давления рабочего тела в предложенном устройстве позволяет значительно упростить пневмо- гидросхемы, в которых применяется данное устройство. 1 з.п. ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор давления | 1986 |
|
SU1446607A1 |
| Регулятор давления | 1986 |
|
SU1322241A1 |
| Регулятор давления | 1988 |
|
SU1575156A2 |
| Регулятор давления | 1986 |
|
SU1439546A1 |
| ЛИНЕЙНЫЙ ЦИЛИНДРИЧЕСКИЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2454778C1 |
| Шагающий болотный тягач | 2022 |
|
RU2779001C1 |
| Шагающий болотоход | 2022 |
|
RU2792148C1 |
| БОЛОТОХОДНАЯ ШАГАЮЩАЯ МАШИНА | 2023 |
|
RU2809311C1 |
| ЛИНЕЙНАЯ ЦИКЛИЧЕСКАЯ ПИЛА ПО МЕТАЛЛУ | 2023 |
|
RU2811348C1 |
| Смеситель | 1986 |
|
SU1373426A1 |
Изобретение относится к системам регулирования и может быть использовано в любой области техники, связанной с регулированием давления рабочего тела. Цель изобретения - расширение функциональных возможное- тей регулятора давления за счет совмещения в регуляторе функций собственно регулятора давления и прибора, контролирующего давление рабочего тела. Цель достигается тем, что в 9 (Л с 00 о потребителю N)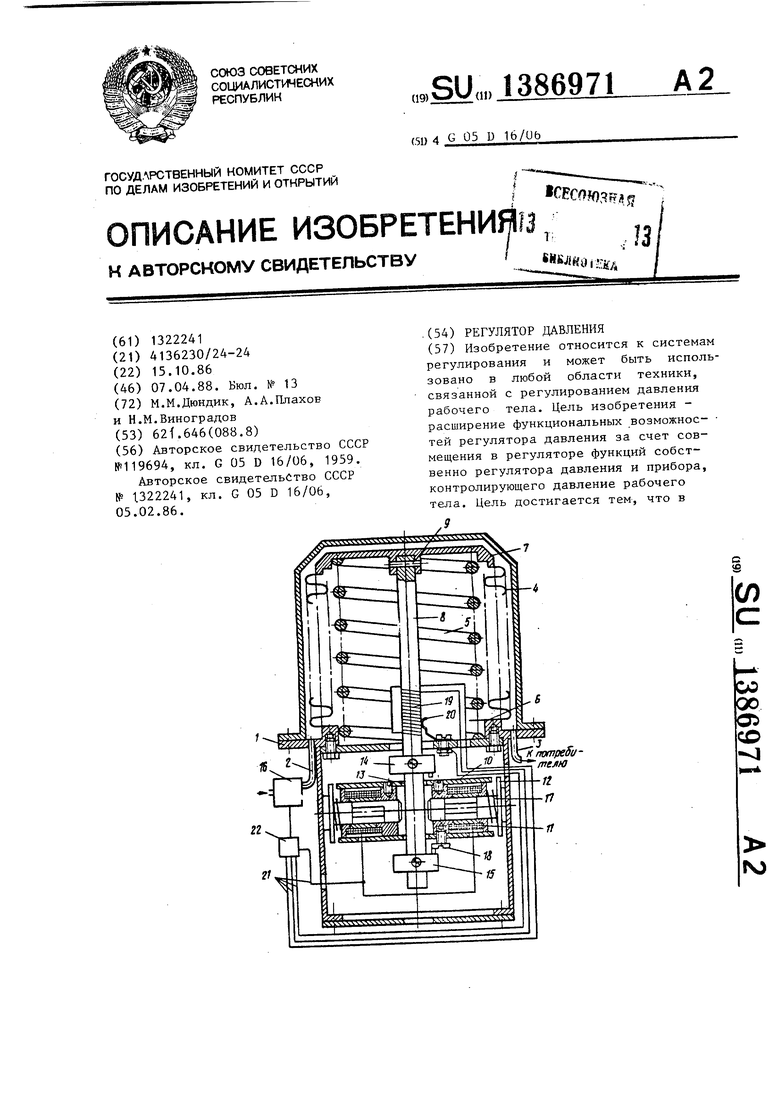
1
Изобретение относитсся к системам регулирования, а именно к регулятора давления, может быть использовано в любой области техники, связанной с регулированием давления рабочего тела, например в пневмогидравлйческих системах, и является усовершенствованием изобретения по авт. св. № 132224Г.
Цель изобретения - расширение функциональных возможностей регулятора за счет совмещения в нем функций собственно регулятора давления и прибора, контролирующего давление рабочего тела.
На чертеже изображен регулятор давления.
Регулятор давления содержит камеру 1 с входным 2 и выходным 3 патрубками для прохода рабочего тела, чувствительный элемент в виде сильфона 4 одно основание которого закреплено на камере 1, а между другим основанием и камерой 1 установлена пружина 5, размещенная внутри сильфона 4. Последний имеет неподвижное основание 6 и подвижное основание 7, воспринимающее давление рабочего тела. Регулятор давления содержит также шток 8, закрепленньм на подвижном основании 7 посредством штифта 9, узел включения и выключения верхнего и нижнего пределов давления с концевыми выключателями, выполнеиньй в виде корпуса 10 с установленными в нем электромагнитными катушками 11. Сердечники 12 электромагнитных катушек I1 установлены перпендикулярно оси штока 8. В корпусе 10 выполнено центральное отверстие 13, в котором установлен незакрепленньй конец штока В. На штоке 8 над и под корпусом закреплены концевой выключатель 14 верхнего предела давления срабатыва
0
0
5
0
ния и концевой выключатель 15. нижнего предела давления срабатывания. Контакты концевых выключателей 14 и 15 включены в цепь питания исполнительного органа 16 пода ш продукта на входной патрубок 2. Сердечники 12 .электромагнитных катушек 11 подпружинены пружинами 17 к наружным торцам электромагнитных катушек 11 и установлены с возможностью контакта со штоком 8. Для регулирования зазоров между концевыми выключателями 14 и 15 и корпусом 10 на последнем закреплены регулировочные винты 18. На свободной поверхности штока 8 вьш1е концевого выключателя 14 на длине хода, корпуса 1U относительно камеры t установлено электрическое сопротивление 19 с возможностью скольжения по подпружиненному электрическому контакту 20, который закреплен на камере 1, при этом электрическое сопротивление 19 и электрический контакт 20 связаны линиями 21 связи с блоком 22 управления, который, в свою очередь, также связан линиями 21 связи с исполнительным органом 16 и узлом включения и выключения верхнего и нижнего пределов давления.
Регулятор давления в пределах одного уровня давлений срабатывания работает следующим образом,
Рабочее тело с помощью систегчы подачи рабочего тела подается через исполнительный орган 16 через входной патрубок 2, воздействует на подвижное основание 6 сильфона и выходит из камеры 1 через выходной патрубок 3. Иод действием силы давления рабочего тела на подвижное основание 7, преодолевая усилие прз жины 15, начинает сжиматься сильфов 4, перемещая вниз шток 8 с концевыми выключателями 15 и 14. При повышении давления рабочего тела до верхнего заданного предела давления срабатывания концевой выключатель 14 упирается в корпус 10 и отключает исполнительный орган 16. Вследствие наличия расхода рабочего тела через выходной патрубок 3 и уменьшения силы давления на подвижное основание 7 сильфон начинает разжиматься, перемещая шток 8 вверх. При достижении давления рабочего тела д о нижнего заданного предела давления срабатывания концевой
выключатель 15 упирается в регулиро- j одолёйая усилие пружин 17, втягиваются в электромагнитные катушки 11, открепляя корпус 10 от камеры 1 и
орган 16.
Верхний и нижний пределы давления
вочный винт 18, установленный на корпусе 10, и включает исполнительньй
закрепляя его на штоке 8. Вследствие наличия расхода рабочего тела через
срабатывания задаются положением кон-2Q выходной патрубок 3 и уменьшения си30
цевых выключателей 14 и 15 на штоке 8 относительно корпуса 10 до упора концевых выключателей 14 и 15 в корпус 10. Свободный ход штока 8 ре- гулируе гся вворачиванием или вывора- 25 чиванием регулировочного винта 18 из корпуса 10, тем самым увеличивая или уменьшая расстояние между корпусом 10 и концевыми выключателями 14 и 15.
Для перевода регулятора на более высокий уровень давления срабатывания от внешней команды включается система .подачи рабочего тела в регулятор и Одновременно подается напряжение на электромагнитные катушки 11, при этом сердечники 12, преодолевая усилие пружин 17, втягиваются до упора и шток 8, тем самым открепляя корпус 10 от корпуса регулятора 1 и закрепляя его на штоке 8. Под действием увеличивающейся силы давления рабочего тела на подвижное основание 7 сильфон 4 сжимается, перемещая вниз шток 8 с закрепленным на нем корпусом 10 и одновременно перемещая электрическое сопротивление 19 относительно электрического контакта 20. При достижении требуемого уровня давления на подвижное основание 7, которое контролируется по изменению электрического сигнала от электричес- кого сопротивления 19 и электрического контакта 20, снимается напряжение с электромагнитных катушек 11, сердечники 12 под действием усилия пружин 17 выдвигаются из электромагнитных55 катушек 11 и упираются в стенки камеры 1, тем самым открепляя корпус 10 от штока 8 и закрепляя его на каме35
40
45
ЛЬ давления на подвижное основание / сильфон 4 разжимается, перемещая вверх шток 8 с закрепленным на нем корпусом 10 и одновременно пере -шщая электрическое сопротивление 19 относительно электрического контакта 20. При достижении требуемого уровня давления на подвижное основание 7, которое контролируется по изменению электрического сигнала от электрического сопротивления 19, и электрического контакта 20, снимается напряжение с электромагнитных катушек 11, сердечники 12 под действием усилия пружин 17 выталкиваются из электромагнитных катушек 11 и упираются в камеру 1, открепляя при этом корпус 10 от штока 8 и закрепляя корпус 10 на камере 1. Далее регулятор работает в обычном режиме на установленном уровне давлений по включению и выключению концевых выключателей 14 и 15.
Совмещение функций регулятора давления и элемента контроля давления рабочего тела в предложенном устройстве позволяет значительно упростить пневмогидросистемы, в которых применяется данное устройство. Особенно эффективно применение его в пневмо- гидросхемах, когда управлять давлением рабочего тела приходится дистанционным путем.
Формула изобретения
№
тем, что, с целью расширения функциональных возможностей регулятора за
ре 1 . Далее регулятор работает в обыч--. ном режиме на установленном уровне давления по включению и выключению концевых выключателей 14 и 15 на заданном пределе давлений срабатывания.
Для перевода регулятора на более низкий уровень давлений срабатывания от внешней команды выключается испол- нительньм орган подачи рабочего тела в регулятор и одновременно подается напряжение на электромагнитные катушки 11, при этом серднечники 12, преютзакрепляя его на штоке 8. Вследствие наличия расхода рабочего тела через
0
5
5
0
5
ЛЬ давления на подвижное основание / сильфон 4 разжимается, перемещая вверх шток 8 с закрепленным на нем корпусом 10 и одновременно пере -шщая электрическое сопротивление 19 отно сительно электрического контакта 20. При достижении требуемого уровня давления на подвижное основание 7, которое контролируется по изменению электрического сигнала от электрического сопротивления 19, и электрического контакта 20, снимается напряжение с электромагнитных катушек 11, сердечники 12 под действием усилия пружин 17 выталкиваются из электромагнитных катушек 11 и упираются в камеру 1, открепляя при этом корпус 10 от штока 8 и закрепляя корпус 10 на камере 1. Далее регулятор работает в обычном режиме на установленном уровне давлений по включению и выключению концевых выключателей 14 и 15.
Совмещение функций регулятора давления и элемента контроля давления рабочего тела в предложенном устройстве позволяет значительно упростить пневмогидросистемы, в которых применяется данное устройство. Особенно эффективно применение его в пневмо- гидросхемах, когда управлять давлением рабочего тела приходится дистанционным путем.
Формула изобретения
№
тем, что, с целью расширения функциональных возможностей регулятора за
513869716
счет совмещения в нем функций собст-тивление соединены линиями связи с
венно регулятора давления и прибора,блоком управления, который, в свою
контролирующего давление рабочегоочередь, связан с исполнительным ортела, на свободной поверхности штокаганом подачи рабочего тела, выше узла включения и выключения2. Регулятор давления по п. 1,
верхнего и нижнего пределов регулиро-отличающийся тем, что
вания относительно камеры установле-электрическое сопротивление установны электрическое сопротивление и под-лено с возможностью перемещения отнопружиненньй электрический контакт, дсительно электрического контакта,
закрепленный на неподвижном основанииизменяя электрический сигнал, с посильфона внутри камеры регулятора,мощью чего контролируется достижение
причем электрический контакт и сопро-требуемого уровня давления.
| Регулятор давления | 1958 |
|
SU119694A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Регулятор давления | 1986 |
|
SU1322241A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
