(21)4124001/24-07
(22)19.06.86
(46) 07.04.88. Бюл. № 13
(71)Московский энергетический институт
(72)Л. Б. Масандилов и Ю. И. Гетман
(53)621.313.525(088.8)
(56)Авторское свидетельство СССР № 408446, кл. Н 02 Р 7/62, 1971.
Авторское свидетельство СССР № 748765, кл. Н 02 Р 7/62, 1978.
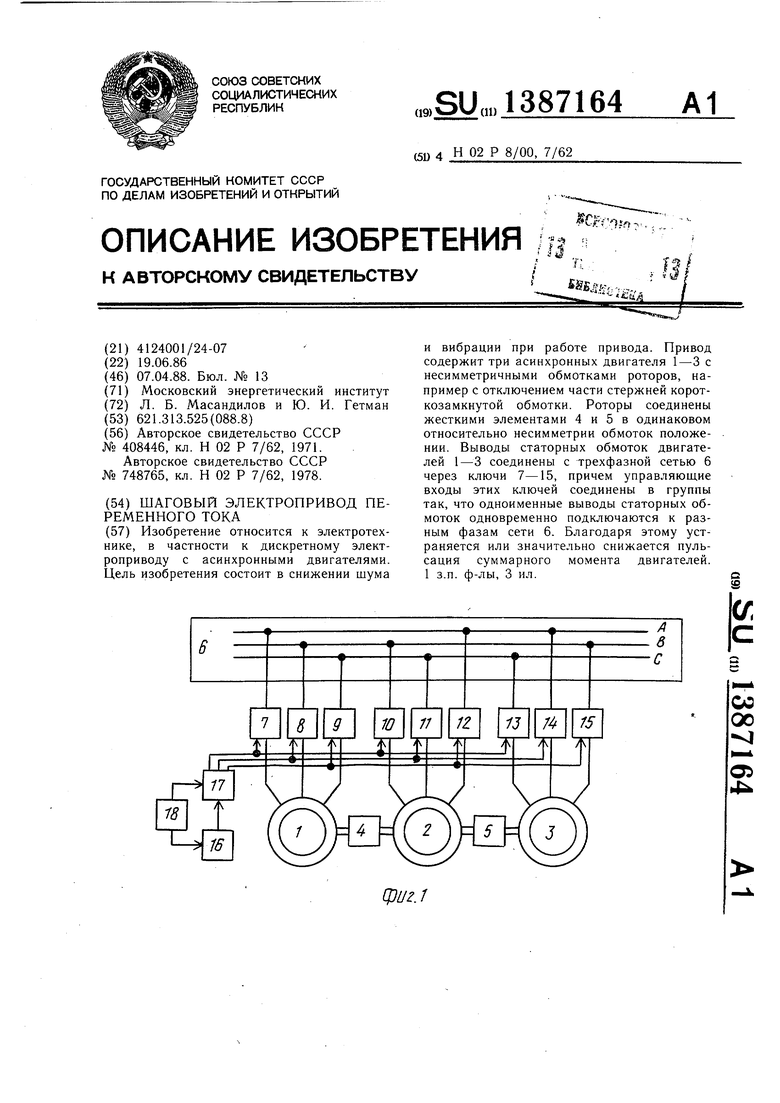
(54)ШАГОВЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА
(57)Изобретение относится к электротехнике, в частности к дискретному электроприводу с асинхронными двигателями. Цель изобретения состоит в снижении шума
и вибрации при работе привода. Привод содержит три асинхронных двигателя 1-3 с несимметричными обмотками роторов, например с отключением части стержней корот- козамкнутой обмотки. Роторы соединены жесткими элементами 4 и 5 в одинаковом относительно несимметрии обмоток положении. Выводы статорных обмоток двигателей 1-3 соединены с трехфазной сетью 6 через ключи 7-15, причем управляющие входы этих ключей соединены в группы так, что одноименные выводы статорных обмоток одновременно подключаются к разным фазам сети 6. Благодаря этому устраняется или значительно снижается пульсация суммарного момента двигателей. 1 з.п. ф-лы, 3 ил.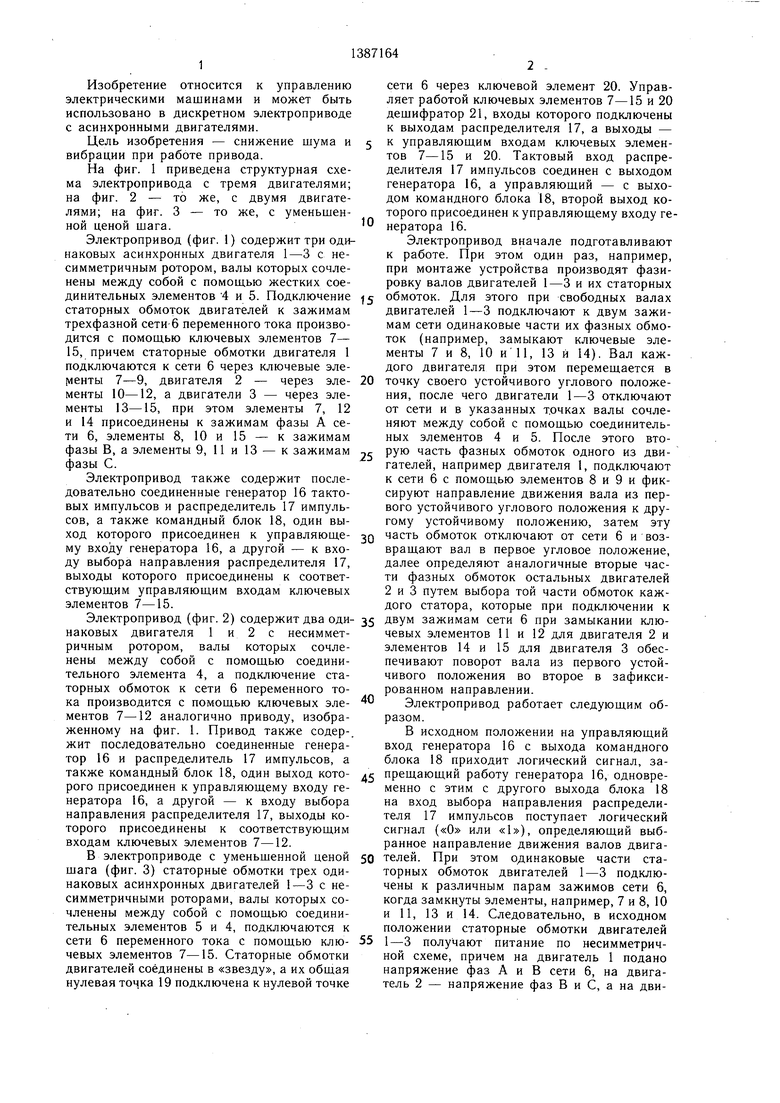
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электропривод | 1984 |
|
SU1246327A1 |
| Устройство для управления асинхронным электроприводом | 1978 |
|
SU748765A1 |
| Шаговый электропривод (его варианты) | 1984 |
|
SU1246323A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ С ФАЗНЫМ РОТОРОМ | 2023 |
|
RU2821722C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2008 |
|
RU2371831C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2007 |
|
RU2337466C1 |
| Электропривод переменного тока | 1985 |
|
SU1309243A1 |
| Реверсивный асинхронный электропривод | 1988 |
|
SU1539951A1 |
| СПОСОБ МУЛЯРА УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ M-ФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1993 |
|
RU2106054C1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 1992 |
|
RU2081504C1 |
а
с
со
00
О5
фиг. Г
сети 6 через ключевой элемент 20. Управляет работой ключевых элементов 7-15 и 20 дешифратор 21, входы которого подключены к выходам распределителя 17, а выходы - к управляющим входам ключевых элементов 7-15 и 20. Тактовый вход распределителя 17 импульсов соединен с выходом генератора 16, а управляющий - с выходом командного блока 18, второй выход которого присоединен к управляющему входу ге нератора 16.
Электропривод вначале подготавливают к работе. При этом один раз, например, при монтаже устройства производят фази- ровку валов двигателей 1-3 и их статорных
25
от сети и в указанных точках валы сочленяют между собой с помощью соединительных элементов 4 и 5. После этого вторую часть фазных обмоток одного из двигателей, например двигателя 1, подключают к сети 6 с помощью элементов 8 и 9 и фиксируют направление движения вала из первого устойчивого углового положения к другому устойчивому положению, затем эту
Изобретение относится к управлению электрическими мащинами и может быть использовано в дискретном электроприводе с асинхронными двигателями.
Цель изобретения - снижение шума и 5 вибрации при работе привода.
На фиг. 1 приведена структурная схема электропривода с тремя двигателями; на фиг. 2 - то же, с двумя двигателями; на фиг. 3 - то же, с уменьщен- ной ценой щага.
Электропривод (фиг. 1) содержит три одинаковых асинхронных двигателя 1-3 с несимметричным ротором, валы которых сочленены между собой с помощью жестких соединительных элементов 4 и 5. Подключение обмоток. Для этого при свободных валах статорных обмоток двигателей к зажимамдвигателей 1-3 подключают к двум зажитрехфазной сети-6 переменного тока произво-мам сети одинаковые части их фазных обмодится с помощью ключевых элементов 7-ток (например, замыкают ключевые эле15, причем статорные обмотки двигателя 1менты 7 и 8, 10 и 11, 13 и 14). Вал кажподключаются к сети 6 через ключевые эле-дого двигателя при этом перемещается в
ленты 7-9, двигателя 2 - через эле- 20 точку своего устойчивого углового положе- менты 10-12, а двигатели 3 - через эле-ния, после чего двигатели 1-3 отключают
менты 13-15, при этом элементы 7, 12 и 14 присоединены к зажимам фазы А сети 6, элементы 8, 10 и 15 - к зажимам фазы В, а элементы 9, 11 и 13 - к зажимам фазы С.
Электропривод также содержит последовательно соединенные генератор 16 тактовых импульсов и распределитель 17 импульсов, а также командный блок 18, один выход которого присоединен к управляюще- 30 часть обмоток отключают от сети 6 и воз- му входу генератора 16, а другой - к вхо-вращают вал в первое угловое положение,
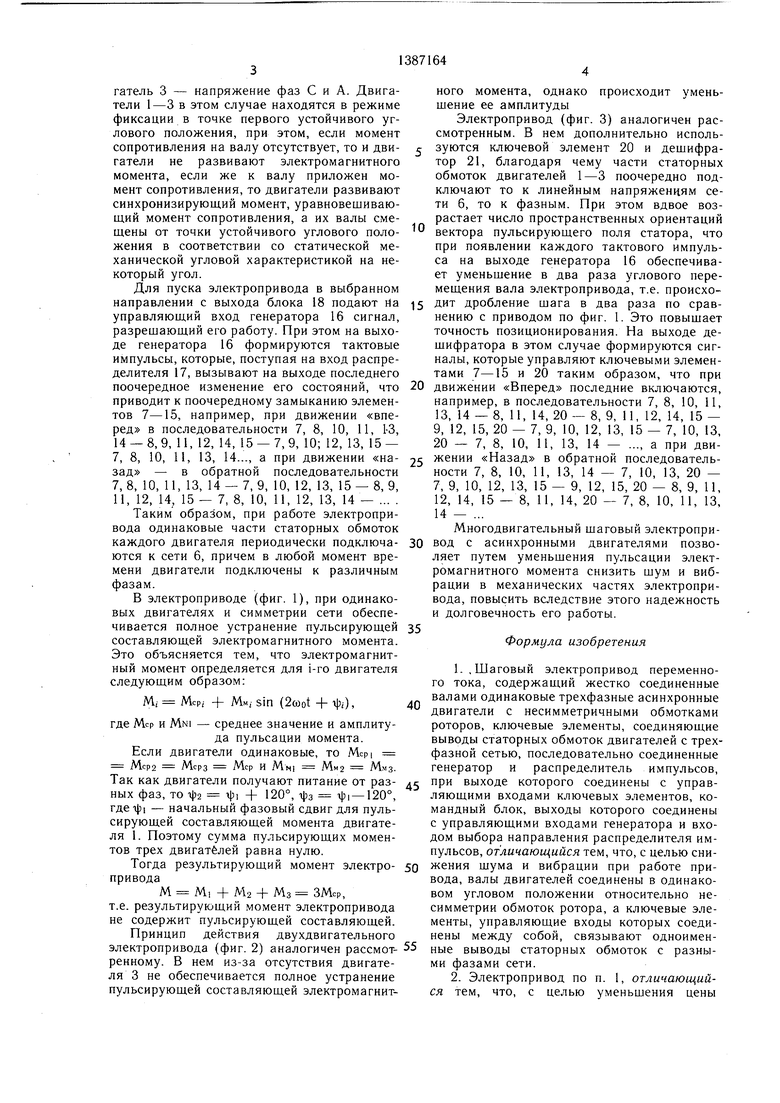
ду выбора направления распределителя 17, далее определяют аналогичные вторые час- выходы которого присоединены к соответ-ти фазных обмоток остальных двигателей ствующим управляющим входам ключевых 2 и 3 путем выбора той части обмоток каж- элементов 7-15.дого статора, которые при подключении к Электропривод (фиг. 2) содержит два оди- 35 двум зажимам сети 6 при замыкании клю- наковых двигателя 1 и 2 с несиммет-чевых элементов 11 и 12 для двигателя 2 и ричным ротором, валы которых сочленены между собой с помощью соединительного элемента 4, а подключение статорных обмоток к сети 6 переменного тока производится с помощью ключевых элементов 7-12 аналогично приводу, изображенному на фиг. 1. Привод также содер-. жит последовательно соединенные генератор 16 и распределитель 17 импульсов, а также командный блок 18, один выход кото- д прещающий работу генератора 16, одновре- рого присоединен к управляющему входу ге-менно с этим с другого выхода блока 18 нератора 16, а другой - к входу выбора на вход выбора направления распредели- направления распределителя 17, выходы ко- теля 17 импульсов поступает логический торого присоединены к соответствующим сигнал («О или «1), определяющий выб- входам ключевых элементов 7-12. ранное направление движения валов двига- В электроприводе с уменьшенной ценой 50 телей. При этом одинаковые части ста- щага (фиг. 3) статорные обмотки трех оди- торных обмоток двигателей 1-3 подключены к различным парам зажимов сети 6, когда замкнуты элементы, например, 7 и 8, 10 и 11, 13 и 14. Следовательно, в исходном положении статорные обмотки двигателей сети 6 переменного тока с помощью клю- 55 1-3 получают питание по несимметрич- чевых элементов 7-15. Статорные обмотки ной схеме, причем на двигатель 1 подано
напряжение фаз А и В сети 6, на двигатель 2 - напряжение фаз В и С, а на дви40
элементов 14 и 15 для двигателя 3 обеспечивают поворот вала из первого устойчивого положения во второе в зафиксированном направлении.
Электропривод работает следующим образом.
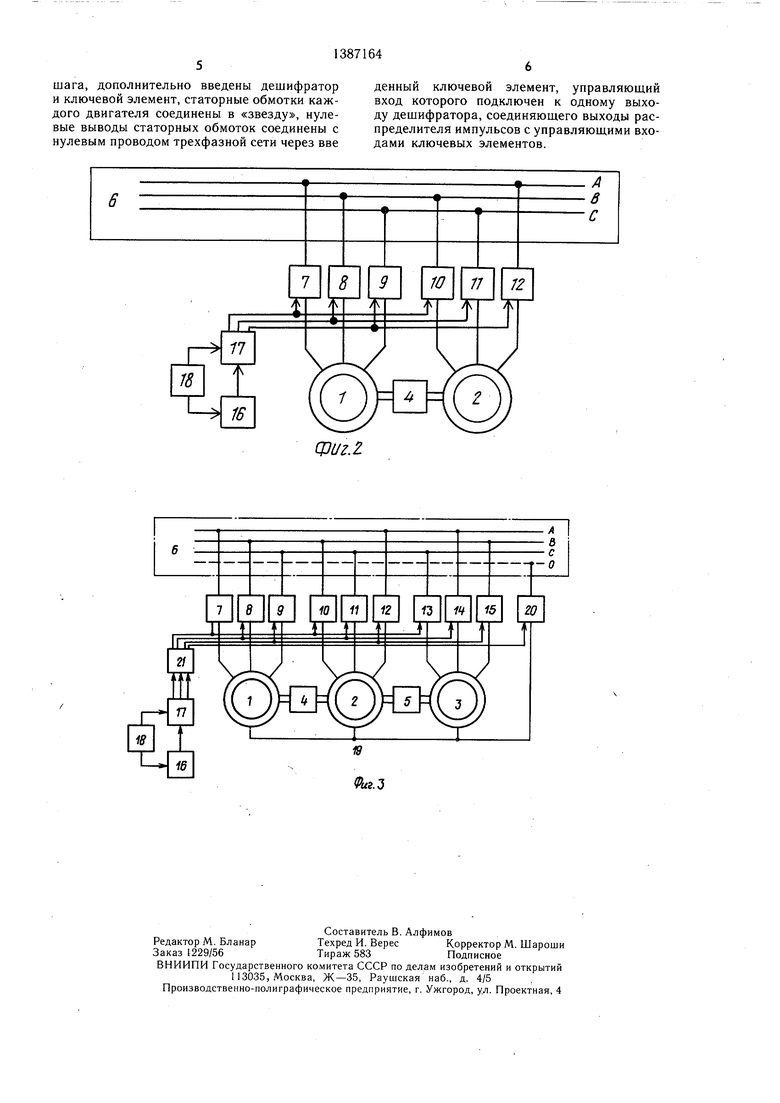
В исходном положении на управляющий вход генератора 16 с выхода командного блока 18 приходит логический сигнал, занаковых асинхронных двигателей 1-3 с несимметричными роторами, валы которых сочленены между собой с помощью соединительных элементов 5 и 4, подключаются к
двигателей соединены в «звезду, а их общая нулевая точка 19 подключена к нулевой точке
сети 6 через ключевой элемент 20. Управляет работой ключевых элементов 7-15 и 20 дешифратор 21, входы которого подключены к выходам распределителя 17, а выходы - к управляющим входам ключевых элементов 7-15 и 20. Тактовый вход распределителя 17 импульсов соединен с выходом генератора 16, а управляющий - с выходом командного блока 18, второй выход которого присоединен к управляющему входу ге- нератора 16.
Электропривод вначале подготавливают к работе. При этом один раз, например, при монтаже устройства производят фази- ровку валов двигателей 1-3 и их статорных
обмоток. Для этого при свободных валах двигателей 1-3 подключают к двум зажи
от сети и в указанных точках валы сочленяют между собой с помощью соединительных элементов 4 и 5. После этого вторую часть фазных обмоток одного из двигателей, например двигателя 1, подключают к сети 6 с помощью элементов 8 и 9 и фиксируют направление движения вала из первого устойчивого углового положения к другому устойчивому положению, затем эту
часть обмоток отключают от сети 6 и воз- вращают вал в первое угловое положение,
далее определяют аналогичные вторые час- ти фазных обмоток остальных двигателей 2 и 3 путем выбора той части обмоток каж- дого статора, которые при подключении к 5 двум зажимам сети 6 при замыкании клю- чевых элементов 11 и 12 для двигателя 2 и прещающий работу генератора 16, одновре- менно с этим с другого выхода блока 18 на вход выбора направления распредели- теля 17 импульсов поступает логический сигнал («О или «1), определяющий выб- ранное направление движения валов двига- 0 телей. При этом одинаковые части ста- торных обмоток двигателей 1-3 подключены к различным парам зажимов сети 6, когда замкнуты элементы, например, 7 и 8, 10 и 11, 13 и 14. Следовательно, в исходном положении статорные обмотки двигателей 5 1-3 получают питание по несимметрич- ной схеме, причем на двигатель 1 подано
0
элементов 14 и 15 для двигателя 3 обеспечивают поворот вала из первого устойчивого положения во второе в зафиксированном направлении.
Электропривод работает следующим образом.
В исходном положении на управляющий вход генератора 16 с выхода командного блока 18 приходит логический сигнал, загатель 3 - напряжение фаз С и А. Двигатели 1-3 в этом случае находятся в режиме фиксации в точке первого устойчивого углового положения, при этом, если момент сопротивления на валу отсутствует, то и двигатели не развивают электромагнитного момента, если же к валу приложен момент сопротивления, то двигатели развивают синхронизирующий момент, уравновешивающий момент сопротивления, а их валы смещены от точки устойчивого углового положения в соответствии со статической механической угловой характеристикой на некоторый угол.
Для пуска электропривода в выбранном
ного момента, однако происходит уменьшение ее амплитуды
Электропривод (фиг. 3) аналогичен рассмотренным. В нем дополнительно исполь- зуются ключевой элемент 20 и дешифратор 21, благодаря чему части статорных обмоток двигателей 1-3 поочередно подключают то к линейным напряжениям сети б, то к фазным. При этом вдвое возрастает число пространственных ориентации вектора пульсирующего поля статора, что при появлении каждого тактового импульса на выходе генератора 16 обеспечивает уменьшение в два раза углового перемещения вала электропривода, т.е. происхо10
направлении с выхода блока 18 подают Дит дробление шага в два раза по срав- управляющий вход генератора 16 сигнал,нению с приводом по фиг. 1. Это повышает разрещающий его работу. При этом на выхо-точность позиционирования. На выходе деде генератора 16 формируются тактовыешифратора в этом случае формируются сиг- импульсы, которые, поступая на вход распре-налы, которые управляют ключевыми элемен- делителя 17, вызывают на выходе последнеготами 7-15 и 20 таким образом, что при поочередное изменение его состояний, что20 движении «Вперед последние включаются, приводит к поочередному замыканию элемен-например, в последовательности 7, 8, 10, 11, тов 7-15, например, при движении «впе-13,14 - 8,11,14,20 - 8,9,11,12,14,15 - ред в последовательности 7, 8, 10, 11, 1-3,9, 12, 15, 20 - 7, 9, 10, 12, 13, 15 - 7, 10, 13, 14 - 8,9, 11, 12, 14, 15 - 7,9, 10; 12, 13, 15-20 - 7, 8, 10, 11, 13, 14 - ..., а при дви- 7, 8, 10, 11, 13, 14..., а при движении «на-25 жении «Назад в обратной последовательзад - в обратной последовательности 7,8, 10, 11, 13, 14 - 7,9, 10, 12, 13, 15 - 8,9, 11, 12, 14, 15 - 7, 8, 10, 11, 12, 13, 14 - ... . Таким образом, при работе электропривода одинаковые части статорных обмоток
ности 7, 8, 10, 11, 13, 14 - 7, 10, 13, 20 - 7, 9, 10, 12, 13, 15 - 9, 12, 15, 20 - 8, 9, 11, 12, 14, 15 - 8, 11, 14, 20 - 7, 8, 10, 11, 13, 14 - ...
Многодвигательный шаговый электроприкаждого двигателя периодически подключа- 30 вод с асинхронными двигателями позвоются к сети 6, причем в любой момент времени двигатели подключены к различным фазам.
В электроприводе (фиг. 1), при одинаковых двигателях и симметрии сети обеспечивается полное устранение пульсирующей 35 составляющей электромагнитного момента. Это объясняется тем, что электромагнитный момент определяется для i-ro двигателя следующим образом:
М; Мер; -f Мм,- sin (2(0ot + г|3;) ,
где Мер и MNI - среднее значение и амплитуда пульсации момента. Если двигатели одинаковые, то Mcpi
Мср2 Мсрз Мер и Мщ Мм2 Ммз.
ляет путем уменьшения пульсации электромагнитного момента снизить шум и вибрации в механических частях электропривода, повысить вследствие этого надежность и долговечность его работы.
Формула изобретения
40
сирующей составляющей момента двигате- с управляющими входами генератора и вхо- ля 1. Поэтому сумма пульсирующих момен- дом выбора направления распределителя им- тов трех двигателей равна нулю.пульсов, огли аюьцыйся тем, что, с целью сниТогда результирующий момент электро- 50 жения шума и вибрации при работе при- привода
М MI + М2 + Мз ЗМср, т.е. результирующий момент электропривода не содержит пульсирующей составляющей. Принцип действия двухдвигательного
электропривода (фиг. 2) аналогичен рассмот- 55 ные выводы статорных обмоток с разны- ренному. В нем из-за отсутствия двигате-ми фазами сети,
ля 3 не обеспечивается полное устранение пульсирующей составляющей электромагнитвода, валы двигателей соединены в одинаковом угловом положении относительно несимметрии обмоток ротора, а ключевые элементы, управляющие входы которых соединены между собой, связывают одноимен2. Электропривод по п. 1, отличающийся тем, что, с целью уменьшения цены
ного момента, однако происходит уменьшение ее амплитуды
Электропривод (фиг. 3) аналогичен рассмотренным. В нем дополнительно исполь- зуются ключевой элемент 20 и дешифратор 21, благодаря чему части статорных обмоток двигателей 1-3 поочередно подключают то к линейным напряжениям сети б, то к фазным. При этом вдвое возрастает число пространственных ориентации вектора пульсирующего поля статора, что при появлении каждого тактового импульса на выходе генератора 16 обеспечивает уменьшение в два раза углового перемещения вала электропривода, т.е. происхо
Дит дробление шага в два раза по срав- нению с приводом по фиг. 1. Это повышает точность позиционирования. На выходе дешифратора в этом случае формируются сиг- налы, которые управляют ключевыми элемен- тами 7-15 и 20 таким образом, что при движении «Вперед последние включаются, например, в последовательности 7, 8, 10, 11, 13,14 - 8,11,14,20 - 8,9,11,12,14,15 - 9, 12, 15, 20 - 7, 9, 10, 12, 13, 15 - 7, 10, 13, 20 - 7, 8, 10, 11, 13, 14 - ..., а при дви- жении «Назад в обратной последовательности 7, 8, 10, 11, 13, 14 - 7, 10, 13, 20 - 7, 9, 10, 12, 13, 15 - 9, 12, 15, 20 - 8, 9, 11, 12, 14, 15 - 8, 11, 14, 20 - 7, 8, 10, 11, 13, 14 - ...
Многодвигательный шаговый электроприляет путем уменьшения пульсации электромагнитного момента снизить шум и вибрации в механических частях электропривода, повысить вследствие этого надежность и долговечность его работы.
Формула изобретения
40
/
жения шума и вибрации при работе при-
ные выводы статорных обмоток с разны- ми фазами сети,
вода, валы двигателей соединены в одинаковом угловом положении относительно несимметрии обмоток ротора, а ключевые элементы, управляющие входы которых соединены между собой, связывают одноимен2. Электропривод по п. 1, отличающийся тем, что, с целью уменьшения цены
шага, дополнительно введены дешифратор и ключевой элемент, статорные обмотки каждого двигателя соединены в «звезду, нулевые выводы статорных обмоток соединены с нулевым проводом трехфазной сети через вве
(Pi/г. 2.
т:-Н
денный ключевой элемент, управляющий вход которого подключен к одному выходу дешифратора, соединяющего выходы распределителя импульсов с управляющими входами ключевых элементов.
Фиг.
