Изобретение относится к электротехнике, а именно к шаговым электроприводам с асинхронными двигателями, и может быть использовано для электропривода механизмов с малой частотой вращения рабочего органа.
Цель изобретения - повышение надежности и срока службы.
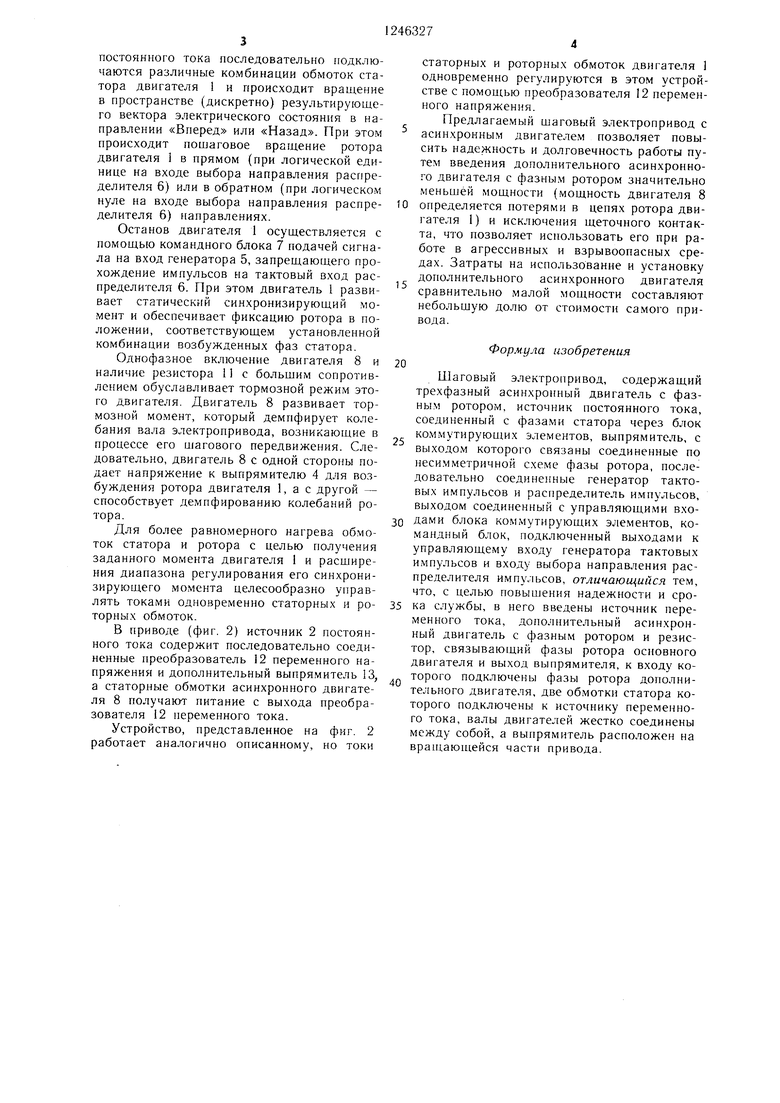
На фиг. 1 показана структурная схема электропривода; на фиг. 2 - то же, с од- HOBpeMeH ibiM регулированием питания ос- новного и дополнительного двигателя.
Устройство (фиг. 1) содержит асинхронный двигатель 1 с фазным ротором, источник 2 постоянного тока, блок 3 коммутирующих элементов, выпрямитель 4, последовательно соединенные генератор 5 тактовых импульсов и распределитель 6 импульсов, а также командный блок 7, подключенный своими выходами к управляющему входу генератора 5 и к входу выбора направления распределителя 6 импульсов. Выход распределителя 6 присоединен к управляющему входу блока 3 коммутирующих элементов, причем обмотки ротора асинхронного дви|-а- теля 1 соединены но несимметричной схеме с выходом Быпрямите.ля 4, а обмотки статора подключены к источнику 2 постоянного тока через блок 3 коммутирующих элементов. Кроме этого, в устройство введен дополнительный асинхронный двигатель 8 с фазным ротором, две фазы обмотки статора которого подключены к зажимам источника 9 переменного тока, а обмотки ротора - к входу выпрямителя 4, причем валы двигателей 1 и 8 соединены между собой жесткой связью 10., на которой установлен выпрямитель 4, через резистор 11, соединенный с обмоткой ротора двигателя 1.
В устройстве по фиг. 2 источник 2 постоянного тока выполнен в виде последовательно соединенных преобразователя 12 переменного напряжения и дополнительного
10
состояния. Этот закон ког.1мутации обмоток статооа двигателя 1 задается распределителем 6 импульсов, который управляет работой блока 3 ко.ммутирующих элементов. Режимом работы распределителя 6 импульсов управляет командный блок 7 и генератор 5 тактовых импульсов. Выпрямитель 4 преобразует роторное нере.менное напряжение дополнительного асинхронного двигателя 8 в постоянное напряжение, которое пропорционально скольже1Н1ю асинхронного двигателя 8. ри ма.лой частоте вращения рабочего органа это скольжение близко к единице. Поэтому амплитуда ЭДС ротора двигателя 8 изменяется незначительно, что онреде- 5 ляет практически постоянную величину тока на выходе выпрямителя 4 при неизменном напряжении статорз двигателя 8.
В исходном состоянии включены источник 2 liOCTOHisfiOi o тока и ис 1 очник 9 переменного тока. На вход енератора 5 приходит сигнал с выхода командного блока 7, запрещающий постуилсыне импульсов с выхода 1 енератора 5 на тактовый вход распределителя 6. С другого командного блока 7 на вход выбора направления рас- пределуггеля 6 приходит си1 нал, задаюн1ий программу работы распределителя 6 и, следовательно, закон коммутап.ии обмоток статора двигателя 1 (например, .логическая еди- ,а .чля движения вала ;и5игате;1я «Вперед или логический ноль для движения «Назад). Распределитель 6 на выходе имеет сигнал, обеснечиваюпшй с помощью блока 3 нач:алы-1ую комбинацию питания обмоток статора дви атсля постоянным током от источника 2. При этом статорные обмотки асиихропно о двигателя 8 получают питание от зажимов источника 9 переменного тока, а роторное нанряжение двигателя 8 выпрямляется выпрямителем 4 и подается на роторные обмо ски основного двигателя 1, в результате чего по ним протекает ностоян20
25
30
35
выпрямителя 13, причем выход преобразова- д ный ток. Таким образом, в исходном состоя- теля 12 переменного напряжения одновременно является и выходом источника 9 переменного тока, который подключен к статору вспомогательного асинхронного двигателя 8. В данном случае источник 9 переменного тока выполнен в виде преобразова- 45 теля 12 переменного напряжения, входом подключенного к сети 14 переменного тока.
НИИ но статорным и роторным обмоткам двигателя 1 протекают постояршые тонн и двигатель 1 pa Bi-iFijier синхронизирующий момент, уравновеигиваюпАий момент сопротивления на его валу п MOMetiT, С1)здаваемый двигателем 8. В предлагаемом 11)ИЕ5оде дви- гате.аь 8 выбирается по сравнению с основным двигателем 1 значительно мепьи1ей мощ- ност})Ю, а, следовательно, и момент, создаваемый Hvi, значительно меньше момента ос- ()i i двигателя .
Устройство (фиг. 1) работает следующим образом.
Шаговый режим асинхронного двигате- ля 1 в этой схеме обеспечивается тем, что обмотки ротора основного двигателя 1 соединены по несимметричной схеме и питаются постоянным токо.м от ВЕ)1прямителя 4, а обмотки статора подключаются к источнику 2 постоянного тока с помощью блока 3 коммутирующих элементов по определенному закону (программе), изменяя в пространстве результирующий вектор электрического
состояния. Этот закон ког.1мутации обмоток статооа двигателя 1 задается распределителем 6 импульсов, который управляет работой блока 3 ко.ммутирующих элементов. Режимом работы распределителя 6 импульсов управляет командный блок 7 и генератор 5 тактовых импульсов. Выпрямитель 4 преобразует роторное нере.менное напряжение дополнительного асинхронного двигателя 8 в постоянное напряжение, которое пропорционально скольже1Н1ю асинхронного двигателя 8. ри ма.лой частоте вращения рабочего органа это скольжение близко к единице. Поэтому амплитуда ЭДС ротора двигателя 8 изменяется незначительно, что онреде- ляет практически постоянную величину тока на выходе выпрямителя 4 при неизменном напряжении статорз двигателя 8.
В исходном состоянии включены источник 2 liOCTOHisfiOi o тока и ис 1 очник 9 переменного тока. На вход енератора 5 приходит сигнал с выхода командного блока 7, запрещающий постуилсыне импульсов с выхода 1 енератора 5 на тактовый вход распределителя 6. С другого командного блока 7 на вход выбора направления рас- пределуггеля 6 приходит си1 нал, задаюн1ий программу работы распределителя 6 и, следовательно, закон коммутап.ии обмоток статора двигателя 1 (например, .логическая еди- ,а .чля движения вала ;и5игате;1я «Вперед или логический ноль для движения «Назад). Распределитель 6 на выходе имеет сигнал, обеснечиваюпшй с помощью блока 3 нач:алы-1ую комбинацию питания обмоток статора дви атсля постоянным током от источника 2. При этом статорные обмотки асиихропно о двигателя 8 получают питание от зажимов источника 9 переменного тока, а роторное нанряжение двигателя 8 выпрямляется выпрямителем 4 и подается на роторные обмо ски основного двигателя 1, в результате чего по ним протекает ностоян0
5
0
5
ный ток. Таким образом, в исходном состоя-
0
5
НИИ но статорным и роторным обмоткам двигателя 1 протекают постояршые тонн и двигатель 1 pa Bi-iFijier синхронизирующий момент, уравновеигиваюпАий момент сопротивления на его валу п MOMetiT, С1)здаваемый двигателем 8. В предлагаемом 11)ИЕ5оде дви- гате.аь 8 выбирается по сравнению с основным двигателем 1 значительно мепьи1ей мощ- ност})Ю, а, следовательно, и момент, создаваемый Hvi, значительно меньше момента ос- ()i i двигателя .
Для включения электродвигателя 1 в шаговый режим работ1 1 с комапдного блока 7 подается сишал, запускающий генератор 5. При этом импульсы с выхода послед- пего поступают на тактои1з1Й вход распределителя 6. При последоиате.чьном прохожде- пии импульсов на тактовом входе распределителя 6 по программе меняются состояния на его 1зыходе. В соответствии с этой программой с номони ю блока 3 к источнику 2
постоянного тока последовательно подключаются различные комбинации обмоток статора двигателя 1 и происходит враихение в пространстве (дискретно) результирующего вектора электрического состояния в направлении «Вперед или «Назад. При этом происходит пошаговое вращение ротора двигателя в прямом (при логической единице на входе выбора направления распределителя 6) или в обратном (при логическом нуле на входе выбора направления распределителя 6) направлениях.
Останов двигателя 1 осуществляется с помощью командного блока 7 подачей сигнала на вход генератора 5, запрещающего прохождение импульсов на тактовый вход распределителя 6. При этом двигатель 1 развивает статический синхронизирующий момент и обеспечивает фиксацию ротора в положении, соответствующем установленной комбинации возбужденных фаз статора.
Однофазное включение двигателя 8 и наличие резистора 11 с больщим сопротивлением обуславливает тормозной режим этого двигателя. Двигатель 8 развивает тормозной мо.мент, который демпфирует колебания вала электропривода, возникающие в процессе его шагового передвижения. Следовательно, двигатель 8 с одной стороны подает напряжение к выпрямителю 4 для возбуждения ротора двигателя 1, а с другой - способствует демпфированию колебаний ротора.
Для более равномерного нагрева обмоток статора и ротора с целью получения заданного момента двигателя 1 и расщире- ния диапазона регулирования его синхронизирующего момента целесообразно управлять токами одновременно статорных и роторных обмоток.
В приводе (фиг. 2) источник 2 постоянного тока содержит последовательно соединенные преобразователь 12 переменного напряжения и дополнительный выпрямитель 13, а статорные обмотки асинхронного двигателя 8 получают питание с выхода преобразователя 12 переменного тока.
Устройство, представленное на фиг. 2 работает аналогично описанному, но токи
статорных и роторных обмоток двигателя 1 одновременно регулируются в этом устройстве с помощью преобразователя 12 переменного напряжения.
Предлагаемый щаговый электропривод с асинхронным двигателем позволяет повысить надежность и долговечность работы путем введения дополнительного асинхронного двигателя с фазным ротором значительно меньшей мощности (мощность двигателя 8 определяется потерями в цепях ротора двигателя 1) и исключения щеточного контакта, что позволяет использовать его при работе в агрессивных и взрывоопасных средах. Затраты на использование и установку дополнительного асинхронного двигателя сравнительно малой мощности составляют небольшую долю от стоимости самого привода.
Формула изобретения
20
5
Шаговый электрогтривод, содержащий трехфазный асинхронный двигатель с фазным ротором, источник постоянного тока, соединенный с фазами статора через блок ком.мутирующих элементов, выпрямитель, с выходом которого связаны соединенные по несимметричной схеме фазы ротора, последовательно соединенные генератор тактовых импульсов и распределитель и.мпульсов, выходом соединенный с управляющими вхо0 дами блока коммутирующих элементов, командный блок, подключенный выходами к управляющему входу генератора тактовых импульсов и входу выбора направления распределителя импульсов, отличающийся тем, что, с целью повышения надежности и сро5 ка службы, в него введены источник переменного тока, дополнительный асинхронный двигатель с фазным ротором и резистор, связывающий фазы ротора основного двигателя и выход выпрямителя, к входу которого подключены фазы ротора дополнительного двигателя, две обмотки статора которого подключены к источнику переменного тока, валы двигателей жестко соединены между собой, а выпрямитель расположен на вращающейся части привода.
411}
Фыъ.Т.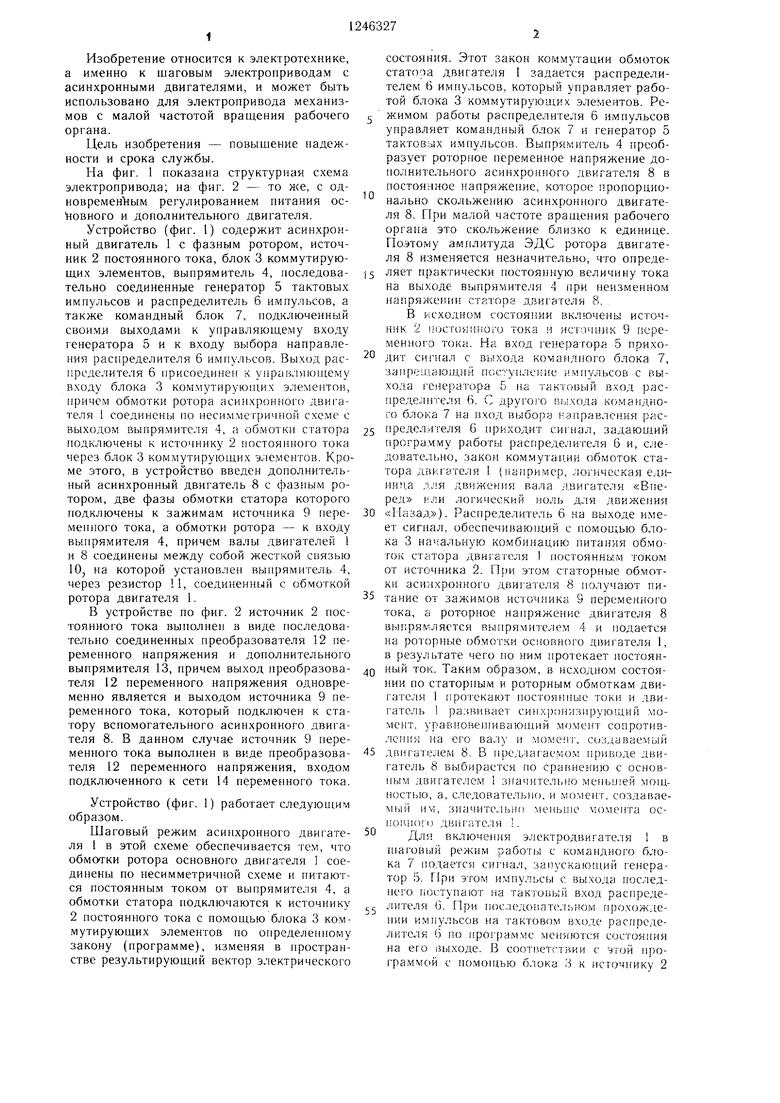
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электропривод переменного тока | 1986 |
|
SU1387164A1 |
| Шаговый электропривод (его варианты) | 1984 |
|
SU1246323A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМ POTOPOM | 1979 |
|
SU824056A1 |
| Устройство для управления трехфазным асинхронным двигателем | 1984 |
|
SU1246324A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2025037C1 |
| Электропривод | 1988 |
|
SU1684902A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2092962C1 |
| Устройство для частотного управления асинхронным двигателем с фазным ротором | 1977 |
|
SU743152A1 |
| Электропривод | 1978 |
|
SU748768A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
Изобретение относится к электротехнике и направлено на повышение надежности и срока службы шагового электропривода с асинхронным двигателем 1 с фазным ротором. Цель достигается за счет введения дополнительного асинхронного двигателя 8 с фазным ротором значительно меньшей мощности, чем мощность двигателя I. Мощность двигателя 8 определяется потерями в цепях ротора двигателя 1. Валы обоих двигателей жестко соединены .между собой. Исключение в приводе щеточного контакта позволяет использовать его в агрессивных и взрывоопасных средах. 2 ил. HZH tc «i 05 а ю Фиг.1
| Устройство для управления асинхронным электроприводом | 1978 |
|
SU748765A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления асинхронным двигателем | 1981 |
|
SU1026276A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лавринов Н | |||
| А | |||
| Шаговый электропривод с асинхронным двигателем с фазным ротором | |||
| - Труды МЭИ | |||
| Вып | |||
| Дровопильное устройство | 1921 |
|
SU302A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
