К
ел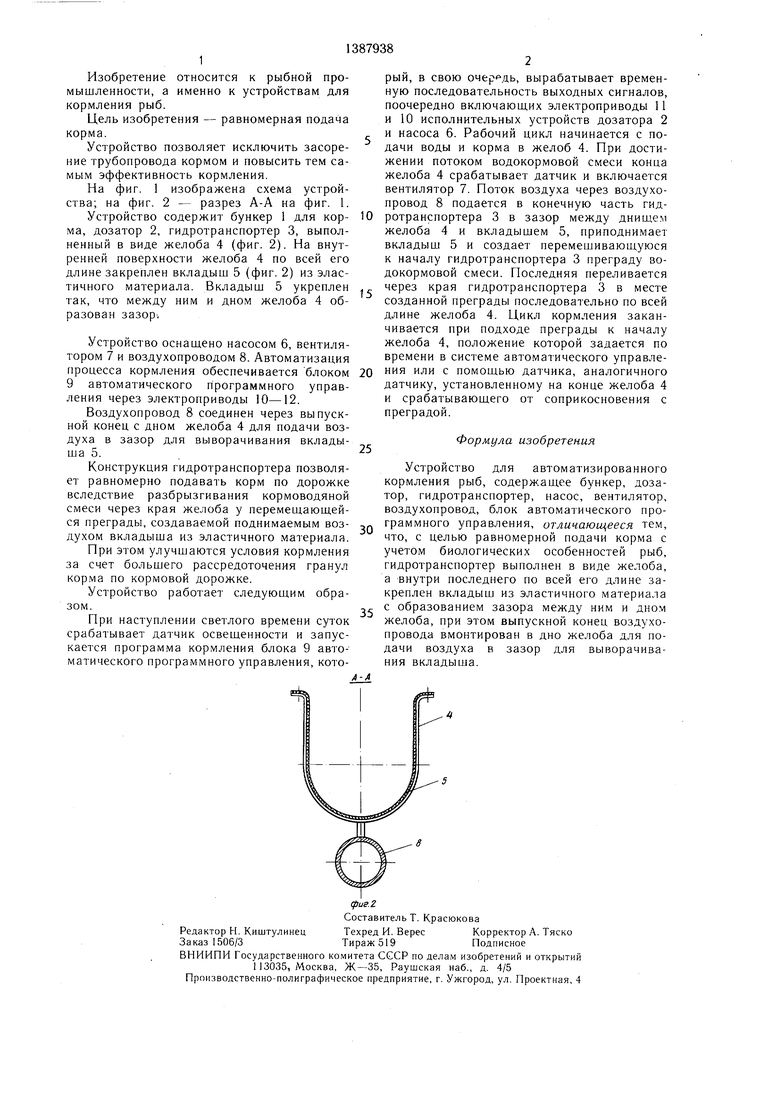
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздачи корма рыбам в рыбоводных водоемах "карусель | 1982 |
|
SU1041084A1 |
| Установка для выращивания рыбы | 1981 |
|
SU1036312A1 |
| УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ ТЕЛЯТ В ПРОФИЛАКТОРНОМ ПЕРИОДЕ | 1989 |
|
RU2038765C1 |
| АВТОМАТИЧЕСКИЙ КОРМОРАЗДАТЧИК | 1971 |
|
SU291691A1 |
| Устройство для кормления рыбы и аэрации воды в рыбохозяйственных водоемах | 1984 |
|
SU1253552A1 |
| УСТРОЙСТВО ДЛЯ КОРМЛЕНИЯ И ЛОВА РЫБЫ В РЫБОВОДНОМ ВОДОЕМЕ | 1993 |
|
RU2067828C1 |
| Пневматический кормораздатчик | 1989 |
|
SU1697657A1 |
| Устройство для выгрузки и распределения живой рыбы по садкам | 1960 |
|
SU139167A1 |
| Устройство для подачи животным сыпучих материалов | 1988 |
|
SU1607754A1 |
| Кормораздатчик для животноводческих помещений | 1982 |
|
SU1026727A1 |
Изобретение относится к рыбной промышленности, а и.менно к устройствам для раздачи корма. Целью изобретения является равномерная подача корма. Устройство содержит бункер 1, дозатор 2, гидротранснор- тер 3, выполненный в виде желоба. На внутренней новерхности желоба но всей его длине закреплен вкладыш 5 из эластичного материала. Вкладын 5 укреплен с образованием зазора между ним и дном желоба Устройство имеет насос 6, вентилятор 7 и воздухопровод 8, конец котор01Ч) вмонтирован в дно желоба для подачи воздуха в зазор между вкладышем 5 и дном желоба для выворачивания вкладыша 5. Автоматизация процесса кормления обеспечивается блоком авто.матического программного управления 9 2 ил.
00 ОС
со со
00
сриа.1
Изобретение относится к рыбной промышленности, а именно к устройствам для кормления рыб.
Цель изобретения - равномерная подача корма.
Устройство позволяет исключить засорение трубопровода кормом и повысить тем самым эффективность кормления.
На фиг. 1 изображена схема устройства; на фиг. 2 - разрез А-А на фиг. 1.
Устройство содержит бункер 1 для корма, дозатор 2, гидротранспортер 3, выполненный в виде желоба 4 (фиг. 2). На внутренней поверхности желоба 4 по всей его длине закреплен вкладыш 5 (фиг. 2) из эластичного материала. Вкладыш 5 укреплен так, что между ним и дном желоба 4 образован зазор-.
Устройство оснашено насосом 6, вентилятором 7 и воздухопроводом 8. Автоматизация
10
15
рый, в свою очер дь, вырабатывает временную последовательность выходных сигналов, поочередно включаюших электроприводы 11 и 10 исполнительных устройств дозатора 2 и насоса 6. Рабочий цикл начинается с подачи воды и корма в желоб 4. При достижении потоком водокормовой смеси конца желоба 4 срабатывает датчик и включается вентилятор 7. Поток воздуха через воздухопровод 8 подается в конечную часть гидротранспортера 3 в зазор между днищем желоба 4 и вкладышем 5, приподни.мает вкладыш 5 и создает перемешиваюшуюся к началу гидротранспортера 3 преграду водокормовой смеси. Последняя переливается через края гидротранспортера 3 в месте созданной преграды последовательно по всей длине желоба 4. Цикл кормления заканчивается при подходе преграды к началу желоба 4, положение которой задается по времени в системе автоматического управлепроцесса кормления обеспечивается блоком 20 И помощью датчика, аналогичного
9 автоматического программного управления через электроприводы 10-12.
Воздухопровод 8 соединен через выпускной конец с дном желоба 4 для подачи воздуха в зазор для выворачивания вкладыша 5.
Конструкция гидротранспортера позволяет равномерно подавать корм по дорожке вследствие разбрызгивания кормоводяной смеси через края желоба у перемещаюодей- ся преграды, создаваемой поднимаемым воздухом вкладыша из эластичного материала.
При э 1 ом улучшаются условия кормления за счет большего рассредоточения гранул корма по кормовой дорожке.
Устройство работает следующим образом.
При наступлении светлого времени суток срабатывает датчик освещенности и запускается программа кормления блока 9 автоматического программного управления, кото25
датчику, установленному на конце желоба 4 и срабатывающего от соприкосновения с преградой.
Формула изобретения
30
Устройство для автоматизированного кормления рыб, содержащее бункер, дозатор, гидротранспортер, насос, вентилятор, воздухопровод, блок автоматического программного управления, отличающееся тем, что, с целью равномерной подачи корма с учетом биологических особенностей рыб, гидротранспортер выполнен в виде желоба, а внутри последнего по всей его длине закреплен вкладыщ из эластичного материала ,- с образованием зазора между ним и дном желоба, при этом выпускной конец воздухопровода вмонтирован в дно желоба для подачи воздуха в зазор для выворачивания вкладыша.
рый, в свою очер дь, вырабатывает временную последовательность выходных сигналов, поочередно включаюших электроприводы 11 и 10 исполнительных устройств дозатора 2 и насоса 6. Рабочий цикл начинается с подачи воды и корма в желоб 4. При достижении потоком водокормовой смеси конца желоба 4 срабатывает датчик и включается вентилятор 7. Поток воздуха через воздухопровод 8 подается в конечную часть гидротранспортера 3 в зазор между днищем желоба 4 и вкладышем 5, приподни.мает вкладыш 5 и создает перемешиваюшуюся к началу гидротранспортера 3 преграду водокормовой смеси. Последняя переливается через края гидротранспортера 3 в месте созданной преграды последовательно по всей длине желоба 4. Цикл кормления заканчивается при подходе преграды к началу желоба 4, положение которой задается по времени в системе автоматического управле И помощью датчика, аналогичного
датчику, установленному на конце желоба 4 и срабатывающего от соприкосновения с преградой.
Формула изобретения
0
Устройство для автоматизированного кормления рыб, содержащее бункер, дозатор, гидротранспортер, насос, вентилятор, воздухопровод, блок автоматического программного управления, отличающееся тем, что, с целью равномерной подачи корма с учетом биологических особенностей рыб, гидротранспортер выполнен в виде желоба, а внутри последнего по всей его длине закреплен вкладыщ из эластичного материала - с образованием зазора между ним и дном желоба, при этом выпускной конец воздухопровода вмонтирован в дно желоба для подачи воздуха в зазор для выворачивания вкладыша.
| Устройство для раздачи кормов рыбам в водоемах | 1974 |
|
SU517291A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
