(Л
00 00 00
ю
о со
1
Изобретение относится к машиностроению, в частности к ручному механизированному инструменту.
Целью изобретения является расширение технологических возможностей путем возможности изменения точки приложения ударного воздействия ударника.
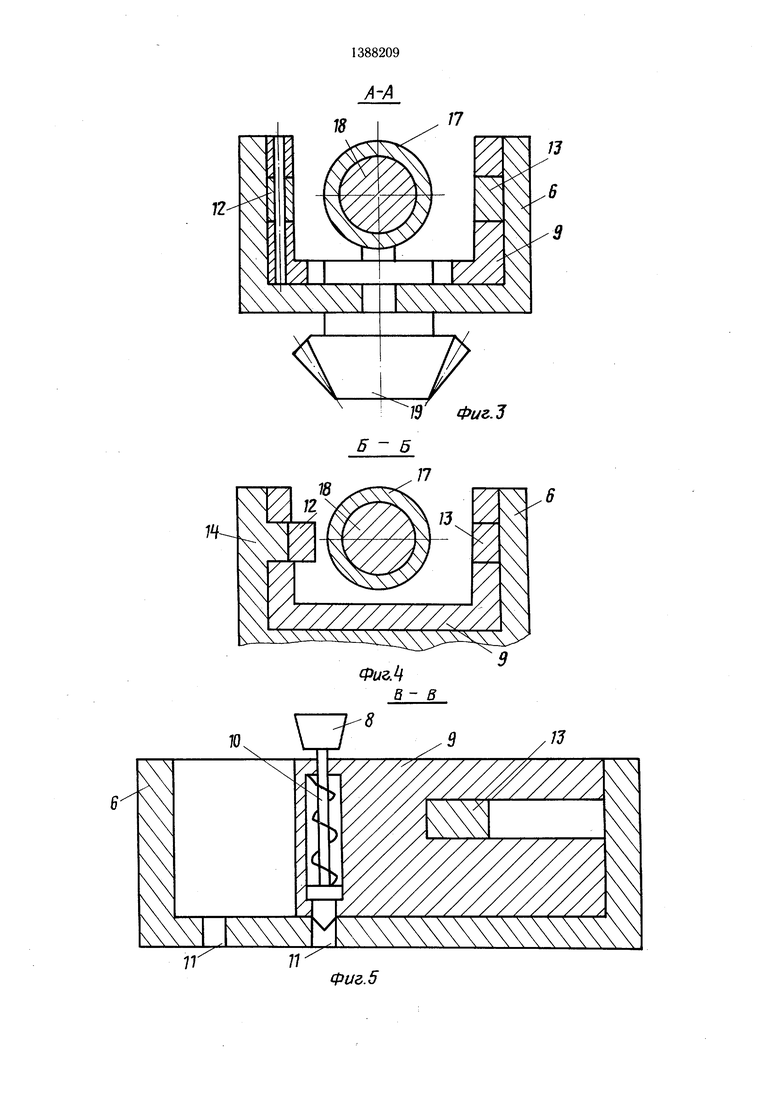
На фиг. 1 показано устройство, общий вид; на фиг. 2 - то же,, вид сбоку; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фиг. 1; на фиг. 6 - разрез Г-Г на фиг. 1; на фиг. 7 - устройство при нижнем положении копира, вид сверху; на фиг. 8 - график усилий.
1388209
10
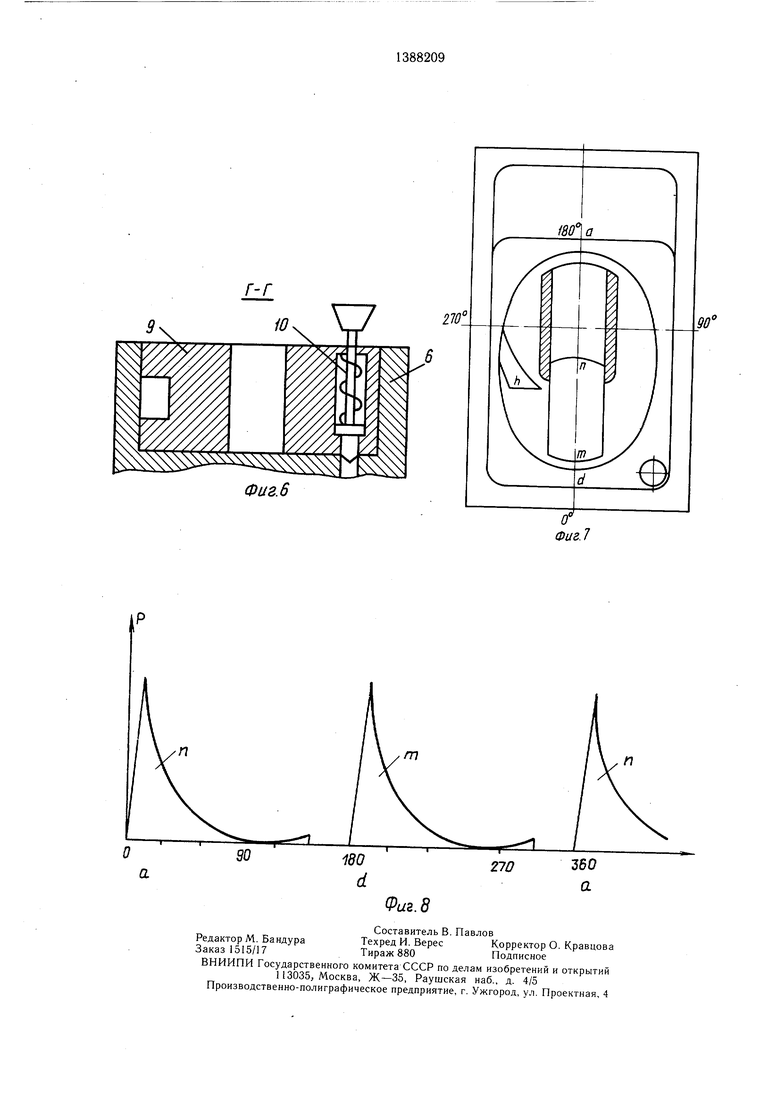
Далее при подходе к точке «h выступа 13 дёбаланс 18 слегка смещается в сторону торца «т, проходя точку «и выступа 13 дёбаланс 18 срывается и свободно перемещается под действием центробежной силы до ударного соприкосновения торца «т с точкой «а копира.
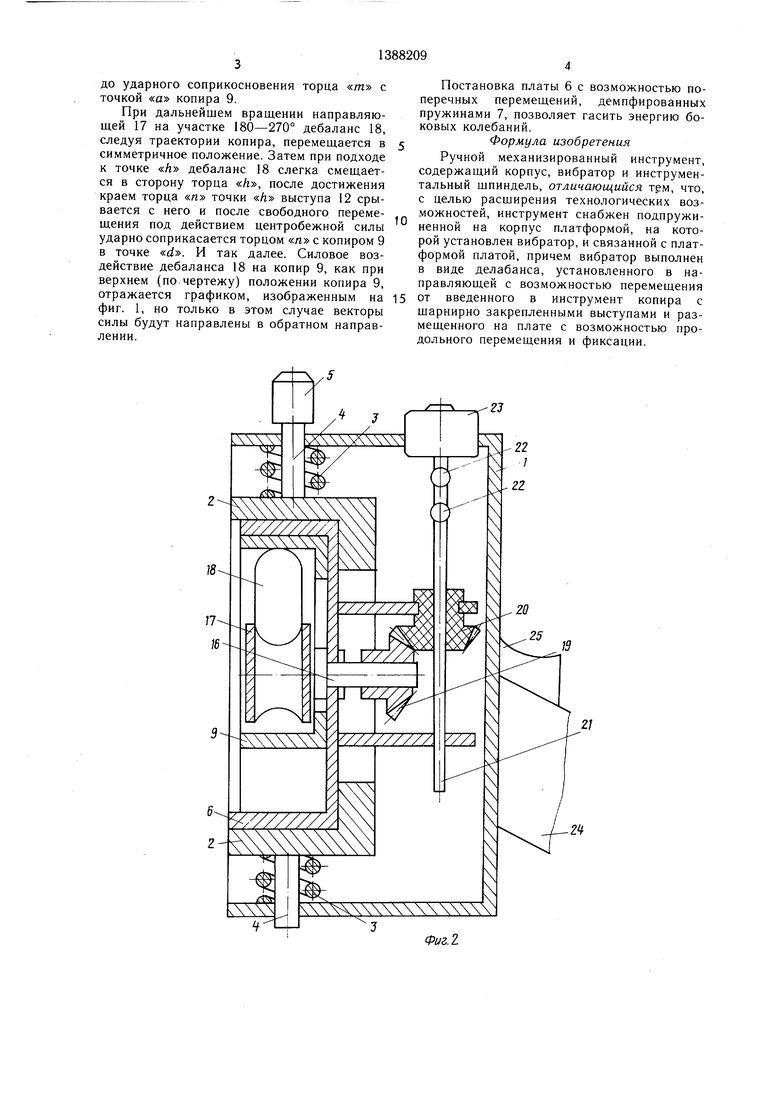
При дальнейшем вращении направляющей на участке 180-270° дёбаланс 18, следуя траектории копира, перемещается в симметричное относительно оси вращения положение. Затем при подходе точки «/г дёбаланс 18 слегка смещается в сторону торца «п после достижения краем торца «п точки «Л выступа 13 срывается с него и посРучной механизированный инструмент со- i 5 ле свободного перемещения под действием стоит из корпуса 1, в котором с возмож- центробежной силы ударно соприкасается ностью продольных перемещений установле- торцом «п с копиром 9 в точке «а и т. д. на платформа 2, демпфированная пружина- Силовое воздействие дебаланса 18 на копир ми 3. С платформой 2 жестко связан ин- 9 представляется графиком, изображенным струментальный шпиндель 4 с держателем 5 на фиг. 1, из которого видно, что эти уси- инструмента. На платформе 2 установлена с 30 лия направлены преимущественно в одном
направлении.
Ударное и силовое соприкосновение дебаланса 18 с копиром 9 через плату 6, платформу 2, щпиндель 4 и держатель перепосредством стопора установлен копир 9. js Дается инструменту. Частоту и амплитуду Фиксатор 8 состоит из подпружиненного вибрации можно уменьшать, увеличивать,
меняя обороты двигателя 23 кнопкой 25 (регулятор может быть любого известного типа, например тиристорный).
При необходимости извлечь штифт из
возможностью поперечных перемещений плата 6, демпфированная пружинами 7. На плате 6 с возможностью продольных перемещений и фиксации в крайних положениях
штока 10, установленного в копире 9, конец которого входит в отверстие 11 платы 6 и фиксирует копир относительно платы 6. На копире 9 шарнирно установлены два выступа 12 и 13, положение которых зависит зо сборки или снять подшипник копир переот положения копира 9. Выступы 12 и 13 взаимодействуют соответственно с кулачками 14 и 15, закрепленными на плате 6. Внутри копира 9 на приводном валу 16 жестко закреплена направляюшая 17, в котоводят в нижнее (по чертежу) положение (фиг. 7), для чего оттягивают фиксатор 8, выводя его из отверстия 11, перемешают копир 9 и, отпустив фиксатор 8, вводят в отверстие 11. При перемещении копира
рой с возможностью перемещения установ- 35 в нижнее положение выступ 13 сходит с
лен дёбаланс 18.
Для передачи вращения приводному валу 16 служат конические зубчатые колеса 19 и 20, шлицевой вал 21, пространственный шарнир 22 и двигатель 23.
кулачка 15 и устанавливается, а выступ 12 выдвигается кулачком 14.
Затем в держателе 5 закрепляют конец штифта 29, после чего включают приводной двигатель 23 и он через пространст- венный шарнир 22, шлицевой вал 21, коническую пару 20 и 19 начинает вращать против часовой стрелки вал 16 с направляющей 17.
При движении направляющей 17 на
Для проведения шабрения или опиловки 45 участке О-90° (по фиг. 7) дёбаланс 18, копир 9 ставится в верхнее (см. фиг. 1) следуя траектории копира 9, постепенно отжимается в симметричное относительно оси вращения положение, при котором оба торца «п и «т дебаланса 18 отстоят на равных расстояниях от оси вращения. При направляющей 17. При движении направ- 50 этом дёбаланс 18 постоянно приближается ляющей на участке О-90° (отсчет положения к положению симметрии на участке О-90° со
скоростью, определяемой скоростью вращения направляющей 17 и траекторией копира 9 в этом участке.
Далее при подходе к точке «Л выступа 12
сительно оси вращения положение, при ко- SS дёбаланс 18 слегка смещается в сторону тор- тором оба торца «п и «т дебаланса 18 ца «т. Пройдя точку «/г выступа 12, де- отстоят на равных расстояниях от оси вра- баланс 18 срывается и свободно перемещения,щается под действием центробежной силы
Для удобства эксплуатации привод снабжен рукояткой 24 и кнопкой 25 включения и регулирования оборотов двигателя 23.
Привод работает следующим образом.
положение. Двигатель 23 через пространственный шарнир 22, шлицевой вал 21, коническую пару 20, 19 начинает вращать против часовой стрелки приводной вал 16 с
дебаланса 18 сейчас и в дальнейшем примем по положению торца «п дебаланса 18) дёбаланс 18, следуя траектории копира 9, постепенно отжимается в симметричное отно1388209
Далее при подходе к точке «h выступа 13 дёбаланс 18 слегка смещается в сторону торца «т, проходя точку «и выступа 13 дёбаланс 18 срывается и свободно перемещается под действием центробежной силы до ударного соприкосновения торца «т с точкой «а копира.
При дальнейшем вращении направляющей на участке 180-270° дёбаланс 18, следуя траектории копира, перемещается в симметричное относительно оси вращения положение. Затем при подходе точки «/г дёбаланс 18 слегка смещается в сторону торца «п после достижения краем торца «п точки «Л выступа 13 срывается с него и поссборки или снять подшипник копир переводят в нижнее (по чертежу) положение (фиг. 7), для чего оттягивают фиксатор 8, выводя его из отверстия 11, перемешают копир 9 и, отпустив фиксатор 8, вводят в отверстие 11. При перемещении копира
в нижнее положение выступ 13 сходит с
до ударного соприкосновения торца «т с точкой «а копира 9.
При дальнейшем вращении направляющей 17 на участке 180-270° дебаланс 18, следуя траектории копира, перемещается в 5 симметричное положение. Затем при подходе к точке «Л дебаланс 18 слегка смещается в сторону торца «Л, после достижения краем торца «/г точки «Л выступа 12 срывается с него и после свободного перемещения под действием центробежной силы ударно соприкасается торцом «л с копиром 9 в точке «d. И так далее. Силовое воздействие дебаланса 18 на копир 9, как при верхнем (по чертежу) положении копира 9,
10
Постановка платы 6 с возможностью поперечных перемещений, демпфированных пружинами 7, позволяет гасить энергию боковых колебаний.
Формула изобретения
Ручной механизированный инструмент, содержащий корпус, вибратор и инструментальный щпиндель, отличающийся т.ем, что, с целью расширения технологических возможностей, инструмент снабжен подпружиненной на корпус платформой, на которой установлен вибратор, и связанной с платформой платой, причем вибратор выполнен в виде делабанса, установленного в направляющей с возможностью перемещения
отражается графиком, изображенным на15 от введенного в инструмент копира с фиг. 1, но только в этом случае векторышарнирно закрепленными выступами и раз- силы будут направлены в обратном направ-мешенного на плате с возможностью про- лении.дольного перемещения и фиксации.
Постановка платы 6 с возможностью поперечных перемещений, демпфированных пружинами 7, позволяет гасить энергию боковых колебаний.
Формула изобретения
Ручной механизированный инструмент, содержащий корпус, вибратор и инструментальный щпиндель, отличающийся т.ем, что, с целью расширения технологических возможностей, инструмент снабжен подпружиненной на корпус платформой, на которой установлен вибратор, и связанной с платформой платой, причем вибратор выполнен в виде делабанса, установленного в направляющей с возможностью перемещения
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручной механизированный инструмент | 1987 |
|
SU1516261A1 |
| Бурильная машина ударно-вращательного действия К.М.Каушлы | 1983 |
|
SU1155738A1 |
| Машина ударно-вращательного действия | 1985 |
|
SU1252484A2 |
| Устройство для извлечения спиц и штифтов при остеосинтезе | 1986 |
|
SU1329776A1 |
| Виброгрейфер | 1980 |
|
SU901449A1 |
| Устройство для определения динамических характеристик грунтов | 1980 |
|
SU958584A1 |
| Ручной механизированный инструмент | 1982 |
|
SU1068240A1 |
| Анализатор проб зернового состава | 1976 |
|
SU691216A2 |
| СПОСОБ ВОЗВЕДЕНИЯ СТЕН, УСТАНОВКА ДЛЯ АВТОМАТИЗИРОВАННОГО ВОЗВЕДЕНИЯ СТЕН ИЗ СТРОИТЕЛЬНЫХ МОДУЛЕЙ И КОМПЛЕКТ ОБОРУДОВАНИЯ ДЛЯ МЕХАНИЗИРОВАННОГО ВОЗВЕДЕНИЯ СТЕН ИЗ СТРОИТЕЛЬНЫХ МОДУЛЕЙ | 2011 |
|
RU2464392C1 |
| Машина ударного действия | 1979 |
|
SU903103A1 |
Изобретение относится к машиностроению, в частности к ручному механизированному инструменту. Целью изобретения является расширение технологических возможностей путем возможности изменения точки приложения ударного воздействия ударника. Ручной механизированный инструмент содержит корпус 1, в котором находятся подпружиненная подвижная платформа 2, подвижная плата 6 и вибратор. Вибратор выполнен в виде дебаланса 18, установленного внутри соединенной с приводом направляющей 17. Дебаланс 18 перемешается в на- правляюш.ей 17 в результате его взаимодействия с копиром 9, размешенным на плате 6. Копир 9 имеет возможность продольного перемещения и фиксации в плате 6 и снабжен шарнирно закрепленнььми выступами 12 и 13. Положение выступов 12 и 13 зависит от положения копира 9, перемещение которого приводит к изменению точки приложения ударного воздействия ударника. 8 ил. 
23
Фиг. 2.
Фиг.б
19 Фиг. 5
6-5
Фиг.В
а.
Редактор М. Бандура Заказ 1515/17
Составитель В. Павлов
Техред И. ВересКорректор О. Кравцова
Тираж 880Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фаг. 8
| Шабер | 1976 |
|
SU613864A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
