, ,
сл
со ьо ел
со
СП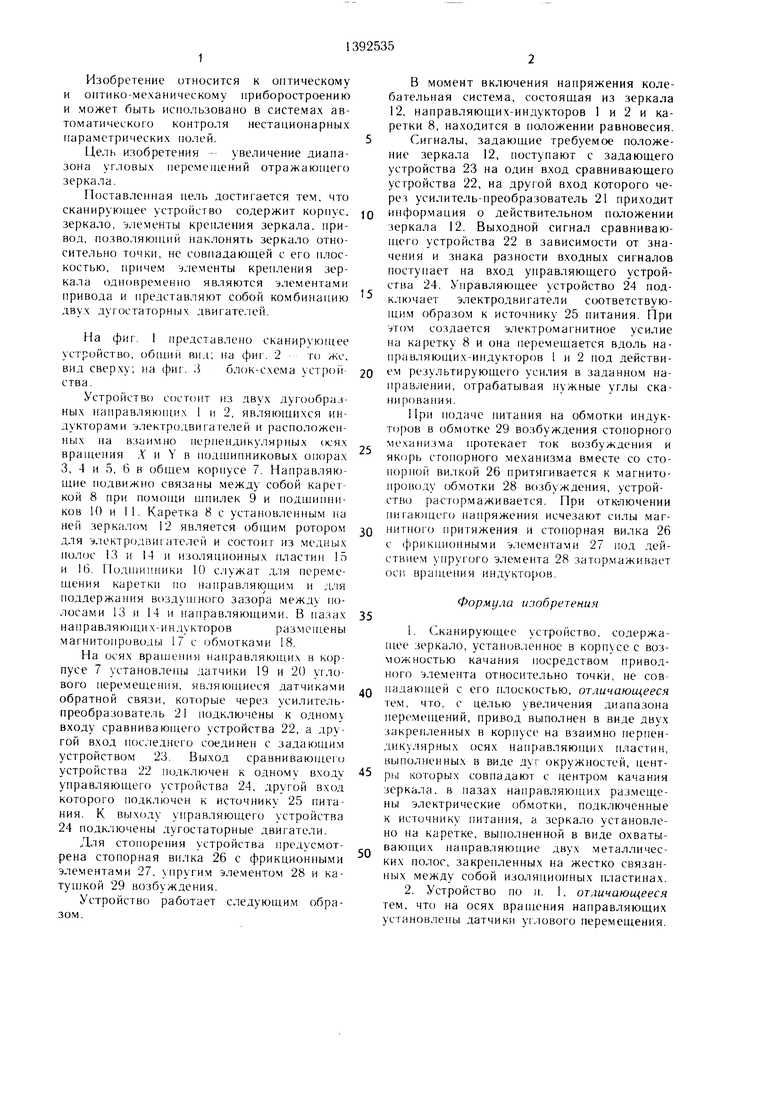
| название | год | авторы | номер документа |
|---|---|---|---|
| Анализирующее устройство для фототелеграфного аппарата | 1973 |
|
SU556563A1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ГРАФИЧЕСКИХ ИЗОБРАЖЕНИИ | 1973 |
|
SU373975A1 |
| Устройство для заливки расплава в формы | 1988 |
|
SU1533832A1 |
| Вентильный двигатель | 1976 |
|
SU663037A1 |
| ПЕРЕСТРАИВАЕМЫЙ ИНТЕРФЕРОМЕТР ФАБРИ-ПЕРО | 2012 |
|
RU2517801C1 |
| Устройство для определения плотности ткани | 1985 |
|
SU1382887A1 |
| СВЧ-дискриминатор сигналов с угловой модуляцией | 1983 |
|
SU1109869A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2018 |
|
RU2681422C1 |
| ПРИБОР ДЛЯ ФОТОЛЮМИНЕСЦЕНТНОГО КАРТОГРАФИРОВАНИЯ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН (ВАРИАНТЫ) | 2000 |
|
RU2172946C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2570336C2 |
И.:(о6ретение относится к оптическому приборостроению и м.б. использовамо в сис- тема.х автоматического контроля нестаии- онарны.х пара.метрических полей. Цель изоб- рете}1ия - увеличение диапазона перемещений зеркала 12, установленного в Ka(iri- ке. Закрепленные на жестко связанны.х мс ду собой изоляционных пластина.х 15, И) мета, 1,1ические полосы 13, 14 t)B;ri ;.мк г направляющие дугообразные н. шстины I . Центры дуг окружностей пластин 1,2 , надают с центром качания зеркала 12. В пазах пластин 1,2 размещены магнитонг - воды 17с обмотками 18. Под действием элех- т))омаг нитны.х усилий каретка с зеркалом 12 перемещается вдоль нанравляюнщх пластин 1,2, обеспечивая требуемые ска нирования. На осях врап1ения направ, 1як) щих в корпусе установлены датчики углового перемещения. 1 з.п. ф-лы, 3 и, 1.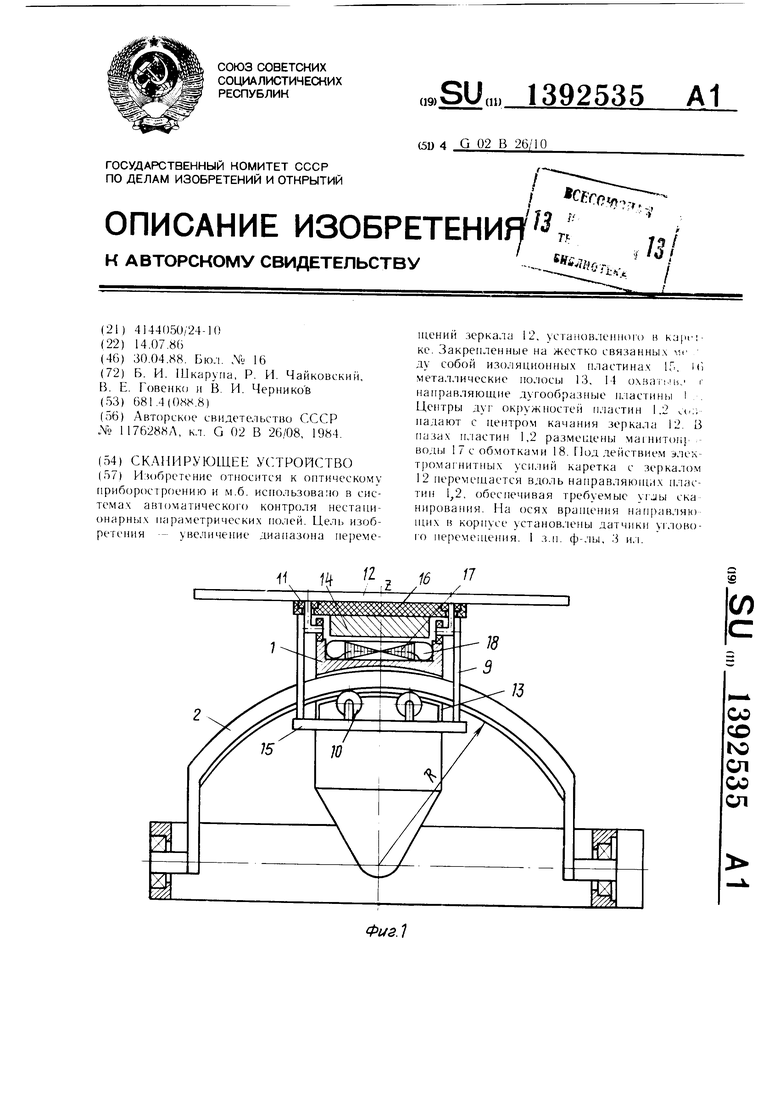
Физ.1
Изобретение относится к оптическому и оптико-механическому приборостроению и может быть использовано в системах автоматического контроля нестационарных параметрических полей.
Цель изобретения - увеличение диапазона угловых Г1еремеп;ений отражаюп1его зеркала.
Поставленная пель достигается тем, что сканируюи1ее устройство содержит корпус, зеркало, элементы крепления зеркала, привод, позволяющий наклонять зеркало относительно точки, не совпадающей с его плоскостью, причем элементы крепления зеркала одновременно являются элементами привода и представляют собой комбинацию двух дугостаторн)1х двигате.тей.
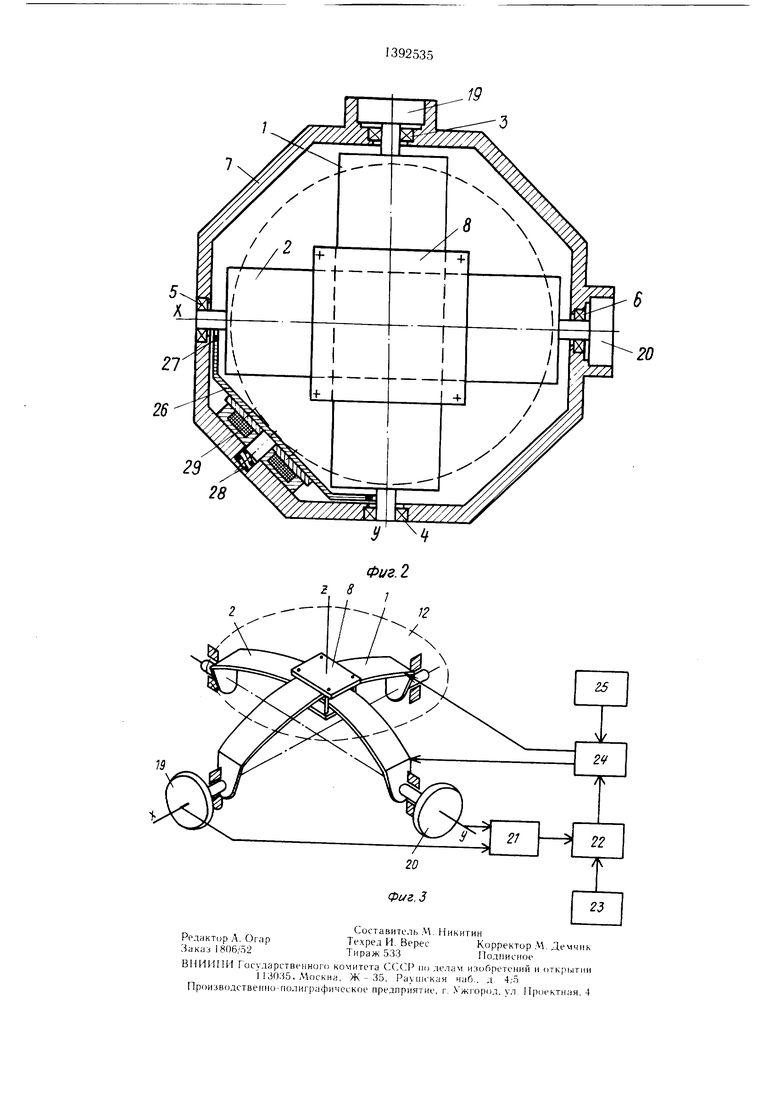
На фиг. I представлено сканируюп1ее устройство, обп1ий вид; па фиг. 2 го же, вид сверху; на фиг. 3 блок-схема устрой- ства.
Устройство состоит из двух дугообразных направляющих I и 2, являющихся индукторами электродвиг а гелей и расположенных на взаи.мно перпендикулярных (х;ях врап1еиия А и Y в подшипниковых опорах 3, 4 и 5, 6 в общем кориусе 7. Направляющие иодвижно связаны между собой кареткой 8 при помощи шпилек 9 и подшиппи- ков К) и 11. Каретка 8 с установленным на ней зеркалом 12 является общим ротором для э.1ектродви ателей и состоит из медных иолос 13 и 14 и изоляцион) пластин 15 и 16. Подшипники 10 служат д.ля перемещения каретки по направляющим и для поддержания воздушного зазора между полосами 13 и 14 и направляющими. В пазах на п равл я х-индукторовразмеп1,ены
магнитопроводы 17 с об.мотками 18.
На осях вращения направляюгпих в корпусе 7 установлены датчики 19 и 20 углового перемеп ения, являюп1иеся датчиками обратной связи, которые через усилитель- преобразователь 21 подключены к одному входу сравнивающего устройства 22, а другой вход последнего соединен с задаюп.1им устройством 23. Выход сравнивающе1ч.) устройства 22 подключен к одному входу управляющего устройства 24, другой вход которого подключен к источнику 25 питания. К выходу управляющего устройства 24 подключены дугостаторные двигатели.
Для стопорения устройства предусмотрена стопорная вилка 26 с фрикционными элементами 27, упругим эле.ментом 28 и катушкой 29 возбуждения.
Устройство работает следующим образом.
Q 5
„ 5
0
В момент включения напряжения колебательная система, состоящая из зеркала 12, направляющих-индукторов 1 и 2 и каретки 8, находится в положении равновесия.
Сигналы, задающие требуемое положение зеркала 12, поступают с задающего устройства 23 на один вход сравнивающего устройства 22, иа другой вход которого через уси. щтель-преобразователь 21 приходит информация о действительном положении зеркала 12. Выходной сигнал сравнивающего устройства 22 в зависимости от значения и знака разности входных сигналов поступает на вход управляющего устройства 24. Управляющее устройство 24 подключает электродвигатели соответствующим образо.м к источнику 25 питания. При этом создается электромагнитное усилие на каретку 8 и она перемещается вдоль на- правляюпхих-ипдукторов 1 и 2 под действием результирующего усилия в заданном направлении, отрабатывая нужные углы сканирования.
При подаче 1штапия на обмотки индукторов в обмотке 29 возбуждения стопорног о механизма протекает ток возбуждения и якорь стопорного механизма вместе со стопорной вилкой 26 притягивается к магнито- проводу обмотки 28 возбуждения, устройство растормаживается. При отк-лючении пигающегс.) напряжения исчезают силы магнитного фитяжения и стопорная вилка 26 с фрик 1иопнь ми элементами 27 под действием упругого элемента 28 затормаживает оси, вращения индукторов.
Формула и:юбретения
29
28
г 8
Фиг. 2
фиг.З
| Дефлектор | 1984 |
|
SU1176288A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
