Уровень техники
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству формирования изображений.
Описание предшествующего уровня техники
Проекторы известны как устройства, которые проецируют свет на поверхность объекта, такого как экран, чтобы отображать требуемое изображение на проекционной поверхности экрана. Практически используемый пример таких проекторов использует оптический сканер, который выполняет одномерное или двумерное сканирование с помощью света (см., например, JP-A-2008-116668 (патентный документ 1)).
Проектор, описанный в патентном документе 1, имеет первый оптический сканер, в котором подвижная пластина, имеющая светоотражательный узел, поворачивается вокруг оси X, второй оптический сканер, в котором подвижная пластина, имеющая светоотражательный узел, поворачивается вокруг оси Y, ортогональной к оси X, и устройство источника света, которое излучает свет, такое как лазер. В таком проекторе первый оптический сканер выполняет сканирование с помощью света, испускаемого посредством устройства источника света, и второй оптический сканер выполняет сканирование с помощью света после сканирования, тем самым выполняя двумерное сканирование с помощью света, чтобы отображать требуемое изображение на экране.
В таком проекторе изображение всегда отображается в фиксированной ориентации относительно ориентации области, в которой изображение может отображаться (области для прорисовки).
В последние годы, в области техники систем цифровых информационных табло, появляются проекты, в которых экран установлен в помещениях станции, в здании, вестибюле отеля и т.п. с интенсивным потоком клиентов, и требуемое изображение (видео для продвижения товаров и услуг, видео с коммерческой рекламой и т.п.) отображается на экране посредством использования вышеуказанного проектора, чтобы предоставлять рекламу для людей недалеко от экрана.
В проекторе, описанном в патентном документе 1, тем не менее, поскольку ориентация изображения всегда является фиксированной относительно ориентации области для прорисовки, как описано выше, возникает проблема в том, что людям трудно распознавать содержимое изображения в зависимости от их положений и ориентаций относительно области для прорисовки. Это представляет, например, такую проблему, что эффект рекламы (эффект привлекательности) не может предоставляться в достаточной степени.
Сущность изобретения
Преимущество некоторых аспектов изобретения состоит в том, чтобы предоставлять устройство формирования изображений, предоставляющее возможность людям легко распознавать содержимое изображения.
Устройство формирования изображений согласно аспекту изобретения включает в себя: светоизлучающий узел, испускающий свет; узел оптического сканирования, сканирующий поверхность отображения с помощью света, испускаемого из светоизлучающего узла; и узел изменения, вращающий изображение, сформированное на поверхности отображения, посредством сканирования с помощью света посредством использования положения около центра в качестве оси вращения для изменения ориентации изображения.
Это дает возможность задания ориентации изображения равной ориентации, при которой человек может легко просматривать его. Таким образом, содержимое изображения может легко распознаваться человеком.
Предпочтительно, устройство формирования изображений согласно аспекту изобретения включает в себя узел изменения положения прорисовки, изменяющий положение изображения, и узел изменения изменяет ориентацию изображения на основе состояния активации узла изменения положения прорисовки.
Это дает возможность изменения ориентации изображения в зависимости от положения изображения. Даже когда положение изображения изменяется вместе с изменением угла проекции, ориентация изображения может задаваться равной требуемой ориентации. Как результат, человек может легко просматривать содержимое изображения. Напротив, когда положение изображения изменяется без изменения ориентации изображения, ориентация изображения может быть наклонена относительно направления сканирования с помощью света, чтобы затруднять просмотр человеком содержимого изображения.
Предпочтительно, в устройстве формирования изображений согласно аспекту изобретения, узел изменения положения прорисовки имеет механизм поворота модулей, поворачивающий светоизлучающий узел и узел оптического сканирования, и узел изменения изменяет ориентацию изображения на основе угла поворота светоизлучающего узла и узла оптического сканирования с помощью механизма поворота модулей.
Это позволяет изменять положение изображения без необходимости регулирования совмещения светоизлучающего узла и узла оптического сканирования. Помимо этого, ориентация изображения может изменяться в соответствии с положением изображения относительно легко.
В устройстве формирования изображений согласно аспекту изобретения механизм поворота модулей предпочтительно поворачивает светоизлучающий узел и узел оптического сканирования вокруг осевой линии, ортогональной к поверхности отображения.
Это позволяет перемещать изображение, главным образом, в направлении горизонтального сканирования при подавлении искажения вследствие изменения положения изображения. В таком случае, если изображение перемещается к горизонтальному сканированию без изменения ориентации изображения, соотношение между направлением горизонтального сканирования и ориентацией изображения смещается вместе с перемещением. Тем не менее, такое смещение может быть скорректировано посредством изменения ориентации изображения. Как результат, преимущества применения изобретения являются значительными в таком случае.
Предпочтительно, устройство формирования изображений согласно аспекту изобретения включает в себя узел считывания, считывающий то, присутствует или нет человек в пределах области считывания, заданной около поверхности отображения, и считывающий состояние перемещения человека, когда человек присутствует в пределах области считывания, узел управления, управляющий возбуждением узла изменения положения прорисовки на основе результата считывания узла считывания.
Это позволяет изменять положение изображения в соответствии с состоянием перемещения человека. Таким образом, содержимое изображения может легко распознаваться человеком.
В устройстве формирования изображений согласно аспекту изобретения узел изменения предпочтительно изменяет ориентацию изображения на основе состояния активации узла изменения положения прорисовки и результата считывания узла считывания.
Это позволяет задавать ориентацию изображения в ориентации, при которой человек может легко просматривать его.
В устройстве формирования изображений согласно аспекту изобретения узел изменения предпочтительно изменяет ориентацию изображения так, чтобы оно было фиксировано относительно ориентации человека.
Это дает возможность человеку легко просматривать содержимое изображения.
В устройстве формирования изображений согласно аспекту изобретения, когда человек перемещается в пределах области считывания, узел управления предпочтительно управляет возбуждением узла изменения положения прорисовки так, что положение изображения изменяется, чтобы оставаться расположенным впереди направления перемещения человека.
Это дает возможность человеку легко просматривать содержимое изображения.
В устройстве формирования изображений согласно аспекту изобретения узел изменения предпочтительно имеет функцию выполнения обработки вращения видеоданных.
Это позволяет вращать изображение, причем положение около центра используется в качестве оси вращения.
В устройстве формирования изображений согласно аспекту изобретения узел изменения предпочтительно имеет узел хранения видеоданных, сохраняющий видеоданные, узел вычисления видеоданных, имеющий функцию выполнения обработки вращения видеоданных, сохраненных в узле хранения видеоданных, и узел модуляции источника света, возбуждающий светоизлучающий узел на основе результата вычисления узла вычисления видеоданных.
Это дает возможность последовательной обработки вращения видеоданных для изменения ориентации изображения.
В устройстве формирования изображений согласно аспекту изобретения узел оптического сканирования предпочтительно включает в себя оптический сканер, предоставленный посредством подвижной пластины, включающей в себя светоотражательный узел, отражающий свет, испускаемый из светоизлучающего узла, причем подвижная пластина является поворотной вокруг одной оси или двух осей, ортогональных друг другу, при этом оптический сканер выполняет сканирование с помощью света, отражаемого посредством светоотражательного узла, посредством поворота.
Это позволяет получить устройство формирования изображений с компактной и простой конфигурацией.
В устройстве формирования изображений согласно аспекту изобретения светоизлучающий узел предпочтительно испускает лазерное излучение.
Это дает возможность получения конфигурации без фокусировки, непосредственной проекции и настройки положения при проекции в произвольном положении без ограничения посредством положения установки. Помимо этого, поскольку использование лазерного излучения позволяет опускать или упрощать оптическую систему, такую как линзы для предоставления направленного света, можно уменьшать размер светоизлучающего узла и тем самым размер устройства формирования изображений.
Краткое описание чертежей
Фиг. 1 является схемой, показывающей вариант 1 осуществления устройства формирования изображений согласно изобретению.
Фиг. 2 является блок-схемой, показывающей схематичную конфигурацию устройства формирования изображений, показанного на фиг. 1.
Фиг. 3 является схемой, показывающей схематичную конфигурацию проектора, включенного в устройство формирования изображений, показанное на фиг. 2.
Фиг. 4 является перспективной схемой, частично показывающей в разрезе оптический сканер, включенный в проектор, показанный на фиг. 3.
Фиг. 5A и 5B являются видами в разрезе для пояснения работы оптического сканера, показанного на фиг. 4.
Фиг. 6 является блок-схемой, показывающей систему управления (узел управления активацией, узел оптического сканирования и модуль источника света) проектора, показанного на фиг. 3.
Фиг. 7A и 7B являются схемами для пояснения работы проектора, показанного на фиг. 3 (фиг. 7A является видом сбоку, а фиг. 7B является видом спереди).
Фиг. 8 является графиком, показывающим переходы угла качания подвижной пластины (изменения угла качания во времени) в оптическом сканере (оптическом сканере для горизонтального сканирования) при активации проектора, показанного на фиг. 3.
Фиг. 9 является графиком, показывающим переходы угла качания подвижной пластины (изменения угла качания во времени) в оптическом сканере (оптическом сканере для вертикального сканирования) при активации проектора, показанного на фиг. 3.
Фиг. 10A и 10B являются схемами, показывающими модификацию работы проектора, показанного на фиг. 3 (фиг. 10A является видом сбоку, а фиг. 10B является видом спереди).
Фиг. 11A и 11B являются схемами для пояснения работы (изменения ориентации изображения) проектора, показанного на фиг. 3 (фиг. 11A является схемой перед вращением, а фиг. 11B является схемой после вращения).
Фиг. 12 является видом сбоку, частично показывающим в разрезе механизм поворота модулей узла изменения положения прорисовки, включенного в проектор, показанный на фиг. 3.
Фиг. 13A и 13B является видом сверху для пояснения работы механизма поворота модулей, показанного на фиг. 12.
Фиг. 14 является видом в перспективе, показывающим механизм поворота сканера узла изменения положения прорисовки, включенного в проектор, показанный на фиг. 3.
Фиг. 15 является видом сверху для пояснения работы устройства формирования изображений, показанного на фиг. 1.
Фиг. 16 является видом сверху для пояснения работы (ориентации изображения) устройства формирования изображений, показанного на фиг. 1.
Фиг. 17 является видом сверху для пояснения работы (ориентации изображения) устройства формирования изображений согласно варианту 2 осуществления изобретения.
Фиг. 18 является видом сверху для пояснения работы (ориентации изображения) устройства формирования изображений согласно варианту 3 осуществления изобретения.
Фиг. 19 является видом сверху для пояснения работы (ориентации изображения) устройства формирования изображений согласно варианту 4 осуществления изобретения.
Фиг. 20 является схематичным видом сверху, показывающим оптический сканер проектора, включенного в устройство формирования изображений согласно варианту 5 осуществления изобретения.
Фиг. 21 является видом в разрезе вдоль линии B-B на фиг. 20;
Фиг. 22 является блок-схемой, показывающей узел приложения напряжения узла возбуждения, включенного в оптический сканер, показанный на фиг. 21.
Фиг. 23A и 23B являются схемами, показывающими пример напряжения, сформированного в узле формирования первого напряжения и узле формирования второго напряжения, включенных в узел приложения напряжения, показанный на фиг. 21.
Подробное описание вариантов осуществления
Предпочтительные варианты осуществления устройства формирования изображений согласно изобретению далее описываются со ссылкой на прилагаемые чертежи.
Первый вариант осуществления
Фиг. 1 является схемой, показывающей вариант 1 осуществления устройства формирования изображений согласно изобретению, фиг. 2 является блок-схемой, показывающей схематичную конфигурацию устройства формирования изображений, показанного на фиг. 1, фиг. 3 является схемой, показывающей схематичную конфигурацию проектора, включенного в устройство формирования изображений, показанное на фиг. 2, фиг. 4 является перспективной схемой, частично показывающей в разрезе оптический сканер, включенный в проектор, показанный на фиг. 3, фиг. 5A и 5B являются видами в разрезе для пояснения работы оптического сканера, показанного на фиг. 4, фиг. 6 является блок-схемой, показывающей систему управления (узел управления активацией, узел оптического сканирования и модуль источника света) проектора, показанного на фиг. 3, фиг. 7A и 7B являются схемой для пояснения работы проектора, показанного на фиг. 3 (фиг. 7A является видом сбоку, а фиг. 7B является видом спереди), фиг. 8 является графиком, показывающим переходы угла качания подвижной пластины (изменения угла качания во времени) в оптическом сканере (оптическом сканере для горизонтального сканирования) при активации проектора, показанного на фиг. 3, фиг. 9 является графиком, показывающим переходы угла качания подвижной пластины (изменения угла качания во времени) в оптическом сканере (оптическом сканере для вертикального сканирования) при активации проектора, показанного на фиг. 3, фиг. 10A и 10B являются схемой, показывающей модификацию работы проектора, показанного на фиг. 3 (фиг. 10A является видом сбоку, а фиг. 10B является видом спереди), фиг. 11A и 11B являются схемой для пояснения работы (изменения ориентации изображения) проектора, показанного на фиг. 3 (фиг. 11A является схемой перед вращением, а фиг. 11B является схемой после вращения), фиг. 12 является видом сбоку, частично показывающим в разрезе механизм поворота модулей узла изменения положения прорисовки, включенного в проектор, показанный на фиг. 3, фиг. 13A и 13B являются видами сверху для пояснения работы механизма поворота модулей, показанного на фиг. 12, фиг. 14 является видом в перспективе, показывающим механизм поворота сканера узла изменения положения прорисовки, включенного в проектор, показанный на фиг. 3, фиг. 15 является видом сверху для пояснения работы устройства формирования изображений, показанного на фиг. 1, фиг. 16 является видом сверху для пояснения работы (ориентации изображения) устройства формирования изображений, показанного на фиг. 1. Далее, для удобства описания, верхняя сторона упоминается как "верх", нижняя сторона - как "низ", правая сторона - как "справа", и левая сторона - как "слева" на фиг. 4, фиг. 5A и 5B, фиг. 7A и фиг. 10A и 10B.
Устройство 1 формирования изображений, показанное на фиг. 1, является устройством, которое отображает предварительно определенное изображение g, такое как неподвижное изображение и движущееся изображение (в частности, коммерческая реклама и видео для продвижения товаров и услуг) на поверхности 91 отображения, размещенной на поверхности пола для пола 9 в пределах такой конструкции, как, например, здание.
В варианте осуществления, устройство 1 формирования изображений предоставляется так, что положение области 911 прорисовки, выступающей в качестве области, в которой отображается изображение g, изменяется в зависимости от состояния перемещения человека H, перемещающегося по полу 9. Например, как показано на фиг. 1, перемещение MG области 911 прорисовки выполняется в зависимости от перемещения MH человека H, чтобы поддерживать состояние, в котором область 911 прорисовки находится в предварительно определенном положении спереди от человека H.
Таким образом, даже в то время, когда человек H перемещается, изображение g может отображаться в положении, в котором человек H может легко просматривать изображение g.
В частности, устройство 1 формирования изображений вращает изображение g и область 911 прорисовки, причем положения около центров используются в качестве осей вращения, чтобы изменять ориентации изображения g и области 911 прорисовки, чтобы давать возможность человеку H легко просматривать изображение g.
Из вышеуказанного, устройство 1 формирования изображений может предоставлять превосходную рекламную функцию, например, когда изображения для рекламы, к примеру, коммерческая реклама и видео для продвижения товаров и услуг, используются в качестве выводимого изображения.
Поверхность 91 отображения, выступающая в качестве объекта, на котором отображается изображение g, может быть поверхностью пола для пола 9 или может быть поверхностью экрана, положенного на поверхность пола для пола 9. Когда поверхность экрана, положенного на поверхность пола для пола 9, используется в качестве поверхности 91 отображения, поверхность 91 отображения может иметь оптические свойства, подходящие для отображения изображения g. Таким образом, видимость изображения может улучшаться независимо от материала и т.п. площадки, на которой изображение отображается (пола в варианте осуществления). Составляющий материал такого экрана не ограничивается конкретным образом, и примеры его включают в себя полиэтилен, полипропилен, поливинилхлорид, полистирол, полиамид, акриловую смолу, ABS-смолу, фторсмолу, эпоксидную смолу, кремнийорганическую смолу или сополимер, смесь, полимерный сплав, и т.п., сформированный, главным образом, из вышеуказанных материалов, и один или два или более из указанного может использоваться в комбинации.
Как показано на фиг. 2, устройство 1 формирования изображений формируется из проектора 2, который сканирует поверхность 91 отображения с помощью света и отображает (рисует) изображение на нем, узел 7 считывания, считывающий присутствие или отсутствие и состояние перемещения человека рядом с поверхностью 91 отображения, и узел 8 управления, управляющий возбуждением проектора 2 на основе результата считывания узла 7 считывания. Устройство 1 формирования изображений также имеет кожух 11, и проектор 2 помещается в кожух 11 (см. фиг. 1).
Поскольку устройство 1 формирования изображений, как описано выше, использует проектор 2 типа оптического сканирования, чтобы отображать изображение, устройство является недорогим и легко устанавливаемым по сравнению с устройством, использующим плоскопанельный дисплей, таким как светодиодная панель, жидкокристаллическая панель и органическая электролюминесцентная панель.
Далее, описываются последовательно подробно компоненты, составляющие устройство 1 формирования изображений.
Проектор
Сначала описывается проектор 2.
Проектор 2 выполнен с возможностью отображать изображение g в области 911 прорисовки, сформированной на поверхности 91 отображения посредством сканирования с помощью света, и дает возможность изменения в положении области 911 прорисовки.
В частности, как показано на фиг. 2, проектор 2 имеет модуль 3 источника света (светоизлучающий узел), который излучает свет, узел 4 оптического сканирования, который сканирует поверхность 91 отображения с помощью света, испускаемого из модуля 3 источника света, устройство 5 управления активацией, которое управляет модулем 3 источника света и узлом 4 оптического сканирования, и узел 6 изменения положения прорисовки, изменяющий положение области 911 прорисовки.
Модуль источника света (светоизлучающий узел)
Как показано на фиг. 3, модуль 3 источника света имеет источники 31r, 31g и 31b лазерного излучения для соответствующих цветов и коллиматорные линзы 32r, 32g и 32b и цветоизбирающие зеркала 33r, 33g и 33b, предоставленные в соответствии с источниками 31r, 31g и 31b лазерного излучения для соответствующих цветов, соответственно.
Источники 31r, 31g и 31b лазерного излучения для соответствующих цветов имеют возбуждающие схемы 310r, 310g и 310b и источник 320r света для красного цвета, источник 320g света для зеленого цвета и источник 320b света для синего цвета, соответственно, (см. фиг. 6), чтобы испускать лазерное излучение RR, GG и BB красного цвета, зеленого цвета и синего цвета, соответственно, как показано на фиг. 3. Лазерное излучение RR, GG и BB испускается в состоянии, в котором оно модулируется в ответ на сигналы возбуждения, передаваемые из узла 54 модуляции источника света, описанного ниже, устройства 5 управления активацией, и коллимируется посредством коллиматорных линз 32r, 32g и 32b, выступающих в качестве коллимирующих оптических элементов, в тонкие лучи, соответственно.
Цветоизбирающие зеркала 33r, 33g и 33b имеют характеристики отражения лазерного излучения RR красного цвета, лазерного излучения GG зеленого цвета и лазерного излучения BB синего света, соответственно, и комбинируют лазерное излучение RR, GG и BB соответствующих цветов в одно и применяют одно лазерное излучение (свет) LL.
Следует отметить, что коллиматорные зеркала могут использоваться вместо коллиматорных линз 32r, 32g и 32b. В этом случае тонкий луч направленного пучка лучей света также может формироваться. Когда направленный пучок лучей света испускается из каждого из источников 31r, 31g и 31b лазерного излучения для соответствующих цветов, коллиматорные линзы 32r, 32g и 32b могут опускаться. Источники 31r, 31g и 31b лазерного излучения могут заменяться источниками света, такими как светоизлучающие диоды, которые формируют аналогичные световые пучки. Порядок источников 31r, 31g и 31b лазерного излучения для соответствующих цветов, коллиматорных линз 32r, 32g и 32b и цветоизбирающих зеркал 33r, 33g и 33b на фиг. 3 является просто иллюстративным, их порядок может свободно задаваться с помощью комбинаций соответствующих поддерживаемых цветов (источник 31r лазерного излучения, коллиматорная линза 32r и цветоизбирающее зеркало 33r для красного цвета, источник 31g лазерного излучения, коллиматорная линза 32g и цветоизбирающее зеркало 33g для зеленого цвета, источник 31b лазерного излучения, коллиматорная линза 32b и цветоизбирающее зеркало 33b для синего цвета). Например, комбинация синего цвета, красного цвета и зеленого цвета возможна в порядке сокращения близости к узлу 4 оптического сканирования.
Поскольку модуль 3 источника света, как описано выше, испускает лазерное излучение, модуль 3 источника света не имеет фокусировки, непосредственная проекция может выполняться, и положение при проекции может задаваться в произвольном положении, без ограничения посредством положения установки. Помимо этого, поскольку использование лазерного излучения позволяет упрощать оптическую систему, такую как линзы для предоставления направленного света, можно уменьшать размер модуля 3 источника света и тем самым размер устройства 1 формирования изображений.
Узел оптического сканирования
Далее описывается узел 4 оптического сканирования.
Узел 4 оптического сканирования сканирует поверхность 91 отображения (горизонтальное сканирование: основное сканирование) в горизонтальном направлении (первом направлении) с помощью лазерного излучения LL, испускаемого из модуля 3 источника света, и сканирует поверхность 91 отображения (вертикальное сканирование: субсканирование) в вертикальном направлении (втором направлении, ортогональном к первому направлению) на скорости сканирования, ниже скорости сканирования в горизонтальном направлении, тем самым выполняя двумерное сканирование.
Узел 4 оптического сканирования имеет оптический сканер 41 (узел сканирования в первом направлении), который является зеркалом горизонтального сканирования для сканирования поверхности 91 отображения с помощью лазерного излучения LL, испускаемого из модуля 3 источника света в горизонтальном направлении, узел 43 обнаружения угла (средство обнаружения характера изменения), обнаруживающий угол (характер изменения) подвижной пластины 411a, описанной ниже, оптического сканера 41, оптический сканер 42 (узел сканирования во втором направлении), который является зеркалом вертикального сканирования для сканирования поверхности 91 отображения с помощью лазерного излучения LL, испускаемого из модуля 3 источника света в вертикальном направлении, и узел 44 обнаружения угла (средство обнаружения характера изменения), обнаруживающий угол (характер изменения) подвижной пластины 421a, описанной ниже, оптического сканера 42.
Далее описываются конфигурации оптических сканеров 41 и 42. Поскольку оптические сканеры 41 и 42 имеют аналогичные конфигурации, оптический сканер 41 далее описывается в качестве типичного образца, а описание оптического сканера 42 опускается.
Как показано на фиг. 4, оптический сканер 41 имеет так называемую вибрационную систему с одной степенью свободы (одномерное сканирование) и имеет базовый корпус 411, противоположную подложку 413, предоставленную напротив нижней поверхности базового корпуса 411, и разделительный элемент 412, предоставленный между базовым корпусом 411 и противоположной подложкой 413.
Базовый корпус 411 имеет подвижную пластину 411a, несущий узел 411b, который поддерживает подвижную пластину 411a, чтобы она была поворотной, и пару соединительных узлов 411c и 411d, которые соединяют подвижную пластину 411a с несущим узлом 411b.
Подвижная пластина 411a имеет, в общем, прямоугольную форму при виде сверху. Светоотражательный узел (зеркало) 411e, имеющий коэффициент отражения света, предоставляется на верхней поверхности такой подвижной пластины 411a. Поверхность (верхняя поверхность) светоотражательного узла 411e формирует отражающую поверхность, которая отражает свет. Светоотражательный узел 411e формируется, например, из металлической пленки из Al, Ni и т.п. Постоянный магнит 414 предоставляется на нижней поверхности подвижной пластины 411a.
Несущий узел 411b предоставляется, чтобы окружать внешнюю периферию подвижной пластины 411a при виде сверху подвижной пластины 411a. В частности, несущий узел 411b имеет форму рамки, в пределах которой находится подвижная пластина 411a.
Соединительный узел 411c соединяет подвижную пластину 411a с несущим узлом 411b на левой стороне подвижной пластины 411a, а соединительный узел 411d соединяет подвижную пластину 411a с несущим узлом 411b на правой стороне подвижной пластины 411a.
Каждый из соединительных узлов 411c и 411d имеет удлиненную форму. Каждый из соединительных узлов 411c и 411d является упруго деформируемым. Такая пара соединительных узлов 411c и 411d предоставляется коаксиально, и подвижная пластина 411a поворачивается относительно несущего узла 411b вокруг оси (в дальнейшем называемой "центральной осью J1 поворота").
Базовый корпус 411, как описано выше, формируется из кремния, используемого в качестве основного материала, например, и подвижная пластина 411a, несущий узел 411b и соединительные узлы 411c и 411d формируются неразъемно. Использование кремния в качестве основного материала позволяет реализовывать превосходные характеристики поворота и позволяет достигать превосходной износостойкости. Поскольку кремний может изготовляться посредством микротехнологии, формирование базового корпуса 411 из кремния, используемого в качестве основного материала, позволяет предоставлять высокую точность размеров базового корпуса 411, чтобы достигать превосходных вибрационных характеристик оптического сканера 41. Помимо этого, оптический сканер 41 может уменьшаться в размере.
Разделительный элемент 412 имеет форму рамки, и его верхняя поверхность соединена с нижней поверхностью базового корпуса 411. Разделительный элемент 412 практически идентичен по форме несущему узлу 411b при виде сверху подвижной пластины 411a. Разделительный элемент 412, как описано выше, формируется, например, из различных типов стекол, различных типов керамики, кремния и SiO2.
Следует отметить, что способ соединения разделительного элемента 412 с базовым корпусом 411 не ограничивается конкретным образом, и, например, соединение может выполняться через другой элемент, такой как связующее, либо прямое соединение или анодное соединение может использоваться в зависимости от составляющего материала разделительного элемента 412 и т.п.
Противоположная подложка 413 формируется из различных типов стекол, кремния или SiO2, например, аналогично разделительному элементу 412. Обмотка 415 предоставляется на верхней поверхности противоположной подложки 413 и на площадке напротив подвижной пластины 411a.
Постоянный магнит 414 имеет форму стержня пластины и предоставляется вдоль нижней поверхности подвижной пластины 411a. Постоянный магнит 414, как описано выше, намагничивается (поляризуется) в направлении, ортогональном к центральной оси J1 поворота при виде сверху подвижной пластины 411a. В частности, постоянный магнит 414 предоставляется так, что сегмент линии, соединяющий оба полюса (южный полюс и северный полюс), является ортогональным к центральной оси J1 поворота.
Для постоянного магнита 414, как описано выше, можно использовать магнит на основе неодима, ферритовый магнит, кобальтосамариевый магнит, "алнико магнит" и т.п., например, без конкретного ограничения.
Обмотка 415 предоставляется так, чтобы окружать внешнюю периферию постоянного магнита 414 при виде сверху подвижной пластины 411a.
Оптический сканер 41 имеет узел 416 приложения напряжения, который прикладывает напряжение к обмотке 415. Узел 416 приложения напряжения формируется, чтобы давать возможность регулирования (изменения) условий, включающих в себя значение напряжения и частоту поданного напряжения. Узел 416 приложения напряжения, обмотка 415 и постоянный магнит 414 составляют узел 417 возбуждения, поворачивающий подвижную пластину 411a.
Предварительно определенное напряжение прикладывается к обмотке 415 посредством узла 416 приложения напряжения, и предварительно определенный электрический ток передается через него.
Например, когда переменное напряжение прикладывается к обмотке 415 посредством узла 416 приложения напряжения, электрический ток передается, соответственно, чтобы формировать магнитное поле в направлении толщины (направлении сверху вниз на фиг. 4) подвижной пластины 411a, и направление магнитного поля периодически переключается. В частности, переключение выполняется между состоянием A, в котором частью обмотки 415 около ее верхней стороны является южный полюс, а частью около нижней стороны является северный полюс, и состоянием B, в котором частью обмотки 415 около ее верхней стороны является северный полюс, а частью около ее нижней стороны является южный полюс. Здесь, возбуждение узла 416 приложения напряжения управляется посредством устройства 5 управления активацией, описанного ниже.
В состоянии A, как показано на фиг. 5A, правая часть постоянного магнита 414 смещается вверх посредством отталкивания к магнитному полю, сформированному посредством прохождения электрического тока через обмотку 415, и левая часть постоянного магнита 414 смещается вниз посредством притяжения к магнитному полю. Это поворачивает и наклоняет подвижную пластину 411a против часовой стрелки.
С другой стороны, в состоянии B, как показано на фиг. 5B, правая часть постоянного магнита 414 смещается вниз, и левая часть постоянного магнита 414 смещается вверх. Это поворачивает и наклоняет подвижную пластину 411a по часовой стрелке.
Состояние A и состояние B, как описано выше, повторяются попеременно, чтобы поворачивать (вибрировать) подвижную пластину 411a вокруг центральной оси J1 поворота при крутильном деформировании соединительных узлов 411c и 411d.
При управлении посредством устройства 5 управления активацией, описанного ниже, напряжение, прикладываемое к обмотке 415 посредством узла 416 приложения напряжения, регулируется так, чтобы давать возможность регулирования проходящего электрического тока. Это позволяет регулировать угол качания (амплитуду) поворота подвижной пластины 411a (отражающей лицевой поверхности светоотражательного узла 411e) вокруг центральной оси J1 поворота.
Конфигурация оптического сканера 41, как описано выше, не ограничивается конкретным образом до тех пор, пока она позволяет поворачивать подвижную пластину 411a, и, например, конфигурация может иметь вибрационную систему с двумя степенями свободы. Помимо этого, возбуждающая схема оптического сканера 41 может быть пьезоэлектрической, возбуждаемой с использованием пьезоэлектрического элемента, электростатической, возбуждаемой с использованием электростатического притяжения, и т.п., вместо электромагнитной, возбуждаемой с использованием обмотки 415 и постоянного магнита 414.
Как показано на фиг. 3, оптические сканеры 41 и 42, выполненные выше, предоставляются так, что их центральные оси J1 и J2 поворота имеют направления, ортогональные друг другу. Инициализация оптических сканеров 41 и 42, как описано выше, дает возможность сканирования поверхности 91 отображения двумерно (в двух направлениях, ортогональных друг другу) с помощью лазерного излучения LL, испускаемого из модуля 3 источника света. Как результат, двухмерное изображение может прорисовываться на поверхности 91 отображения с относительно простой конфигурацией.
В частности, свет, испускаемый из модуля 3 источника света, отражается посредством отражающей поверхности светоотражательного узла 411e оптического сканера 41 и затем отражается посредством отражающей поверхности светоотражательного узла 421e оптического сканера 42 и проецируется (применяется) на поверхность 91 отображения. Здесь, светоотражательный узел 411e оптического сканера 41 поворачивается, и светоотражательный узел 421e оптического сканера 42 поворачивается на угловой частоте (скорости), ниже угловой скорости поворота светоотражательного узла 411e. Это реализует сканирование поверхности 91 отображения в горизонтальном направлении и в вертикальном направлении на более низкой скорости сканирования, чем скорость сканирования в горизонтальном направлении, с помощью лазерного излучения LL, испускаемого из модуля 3 источника света. Таким образом, поверхность 91 отображения сканируется двумерно с помощью лазерного излучения LL, испускаемого из модуля 3 источника света, и изображение прорисовывается на поверхности 91 отображения.
Чтобы поворачивать светоотражательный узел 421e оптического сканера 42 на более низкой угловой скорости, чем угловая скорость светоотражательного узла 411e оптического сканера 41, например, оптический сканер 41 может резонансно возбуждаться с использованием резонанса, и оптический сканер 42 может нерезонансно возбуждаться без использования резонанса. Когда оба из оптических сканеров 41 и 42 резонансно возбуждаются, оптические сканеры 41 и 42 могут быть выполнены так, что резонансная частота оптического сканера 41 (резонансная частота вибрационной системы, состоящей из подвижной пластины 411a и соединительных узлов 411c и 411d), превышает резонансную частоту оптического сканера 42.
Свет, испускаемый из модуля 3 источника света, сначала может отражаться посредством светоотражательного узла 421e оптического сканера 42, а затем отражается посредством светоотражательного узла 411e оптического сканера 41. Другими словами, конфигурация может предоставляться так, что сначала выполняется вертикальное сканирование, и затем выполняется горизонтальное сканирование.
Далее приводится описание узла 43 углового обнаружения, обнаруживающего угол подвижной пластины 411a оптического сканера 41. Поскольку узел 44 углового обнаружения, обнаруживающий угол подвижной пластины 421a оптического сканера 42, имеет конфигурацию, аналогичную конфигурации узла 43 углового обнаружения, его описание опускается.
Как показано на фиг. 4, узел 43 углового обнаружения имеет пьезоэлектрический элемент 431 (пьезорезистивный элемент), предоставленный на соединительном узле 411c оптического сканера 41, узел 432 обнаружения электродвижущей силы, который обнаруживает электродвижущую силу, формируемую из пьезоэлектрического элемента 431, и узел 433 углового считывания, который определяет угол (считывает характер изменения) подвижной пластины 411a на основе результата определения узла 432 обнаружения электродвижущей силы.
По мере того, как соединительный узел 411c крутильно деформируется вместе с поворотом подвижной пластины 411a, пьезоэлектрический элемент 431 деформируется, соответственно. Пьезоэлектрический элемент 431 имеет такое свойство, что когда он деформируется из естественного состояния без применяемой внешней силы, он формирует электродвижущую силу с величиной в соответствии с величиной деформации (свойство, при котором значение сопротивления изменяется). Таким образом, узел 433 углового считывания определяет степень кручения соединительного узла 411c на основе величины электродвижущей силы (или значения сопротивления), обнаруживаемой посредством узла 432 обнаружения электродвижущей силы, и определяет угол подвижной пластины 411a (отражающую поверхность светоотражательного узла 411e) из степени кручения. Помимо этого, узел 433 углового считывания определяет угол качания подвижной пластины 411a вокруг центральной оси J1 поворота. Сигнал, включающий в себя информацию угла и угла качания подвижной пластины 411a, передается из узла 433 углового считывания в устройство 5 управления активацией.
База отсчета (0°) обнаруженного угла подвижной пластины 411a может быть в любом состоянии оптического сканера 41. Например, база отсчета может задаваться, когда оптический сканер 41 находится в начальном состоянии (в состоянии, в котором напряжение не прикладывается к обмотке 415).
Определение угла подвижной пластины 411a может выполняться в реальном масштабе времени (непрерывно) или может выполняться прерывисто. Узел 43 обнаружения угла не ограничен узлом с использованием пьезоэлектрического элемента, как в варианте осуществления, до тех пор, пока угол подвижной пластины 411a может обнаруживаться, и, например, оптический датчик может использоваться.
Поскольку узел 4 оптического сканирования, как описано выше, имеет оптические сканеры 41 и 42, как описано выше, устройство 1 формирования изображений может быть реализовано с компактным размером и простой конфигурацией.
Устройство управления активацией
Далее описывается устройство 5 управления активацией.
При отображении (прорисовке) изображения на поверхности 91 отображения посредством использования пары оптических сканеров 41 и 42, как описано выше, в вышеуказанном проекторе 2, искажение возникает вследствие разности в оптической длине пути до поверхности 91 отображения, например, возникает искажение, называемое "трапецеидальным искажением", которое представляет разность в длине в поперечном направлении (горизонтальном направлении) на верхней стороне и нижней стороне изображения, отображаемого на поверхности 91 отображения.
Когда положение области 911 прорисовки или области 912 для прорисовки изменяется, как описано ниже, по меньшей мере, одно из положения (ориентации), формы и области (размера) изображения g, или области 911 прорисовки, отображаемой на поверхности 91 отображения, искажается.
Устройство 5 управления активацией имеет функцию коррекции искажения изображения g или области 911 прорисовки, как описано выше.
Таким образом, изображение с его скорректированным искажением может отображаться на поверхности 91 отображения. Это позволяет отображать изображение, имеющее требуемое содержимое, как легко распознаваемое человеком.
В частности, устройство 5 управления активацией предоставляет узел изменения, изменяющий ориентацию изображения g посредством вращения изображения g, сформированного на поверхности 91 отображения, причем часть около центра используется в качестве оси вращения.
С помощью устройства 5 управления активацией, ориентация изображения g задается в ориентации, при которой человек может легко просматривать его. Содержимое изображения g может легко распознаваться человеком.
Далее описывается устройство 5 управления активацией.
Как показано на фиг. 6, устройство 5 управления активацией имеет узел 51 хранения видеоданных (модуль хранения видеоданных), который сохраняет видеоданные (данные изображений), используемые при прорисовке изображения, узел 52 вычисления видеоданных, узел 53 формирования времени прорисовки, узел 54 модуляции источника света (узел модуляции света), узел 55 вычисления угла качания (узел вычисления амплитуды), узел 56 индикации угла и узел 57 хранения калибровочной линии (модуль хранения калибровочной линии), который сохраняет калибровочную линию.
В устройстве 5 управления активацией, как описано выше, когда видеоданные вводятся в устройство 1 формирования изображений, входные видеоданные временно сохраняются в узле 51 хранения видеоданных, и считывание видеоданных из узла 51 хранения видеоданных используется для того, чтобы выполнять прорисовку изображения. В этом случае прорисовка изображения может начинаться после того, как все видеоданные сохраняются в узле 51 хранения видеоданных, или прорисовка изображения может начинаться после того, как часть видеоданных сохраняется в узле 51 хранения видеоданных, и последующие видеоданные могут сохраняться в узле 51 хранения видеоданных параллельно с прорисовкой изображения.
Для начала прорисовки изображения после того, как часть видеоданных сохраняется в узле 51 хранения видеоданных, по меньшей мере, один кадр, или предпочтительно два или более кадров видеоданных (например, два кадра), сначала сохраняются в узле 51 хранения видеоданных, и затем прорисовка изображения начинается. Причина этого заключается в следующем. Устройство 1 формирования изображений выполняет горизонтальное сканирование в каждом из прямого прохода и обратного прохода вертикального сканирования, чтобы прорисовывать изображение (в дальнейшем также называемое просто "прямой и обратной прорисовкой в вертикальном направлении"). Как описано ниже, считывание видеоданных из узла 51 хранения видеоданных для прорисовки изображения в прямом проходе вертикального направления выполняется в обратном порядке относительно считывания для прорисовки изображения в обратном проходе вертикального сканирования. Чтобы считывать видеоданные из противоположной стороны в начале прорисовки изображения в обратном проходе вертикального прохода, по меньшей мере, один кадр видеоданных для использования при прорисовке изображения в обратном проходе должен сохраняться в узле 51 хранения видеоданных. Помимо этого, чтобы выполнять обработку вращения видеоданных для каждого кадра или изменять порядок считывания видеоданных для каждого пиксела при вращении области 911 прорисовки и изображения g в пределах области 913 для прорисовки как описано ниже, по меньшей мере, один кадр видеоданных должен сохраняться в узле 51 хранения видеоданных.
Узел 51 хранения видеоданных может иметь функцию хранения скорректированных видеоданных после того, как видеоданные подвергаются обработке вращения для каждого кадра, или порядок считывания видеоданных для каждого пиксела изменяется. В этом случае скорректированные данные, сохраненные в узле 51 хранения видеоданных, могут считываться последовательно, и прорисовка может выполняться.
В узле 53 формирования времени прорисовки, формируется информация времени прорисовки и информация линии прорисовки. Информация времени прорисовки отправляется в узел 52 вычисления видеоданных, а информация линии прорисовки отправляется в узел 52 вычисления видеоданных и узел 55 вычисления угла качания.
Информация времени прорисовки включает в себя информацию времени, в которое прорисовка выполняется и т.п. Информация линии прорисовки включает в себя информацию положения в вертикальном направлении линии L прорисовки для прорисовки (угол подвижной пластины 421a) и т.п. Положение любого места линии L прорисовки может задаваться равным положению в вертикальном направлении линии L прорисовки, и может использоваться, например, левый конец, правый конец, центр и т.п.
Узел 52 вычисления видеоданных считывает видеоданные из узла 51 хранения видеоданных и выполняет различные типы вычисления коррекции, включающие в себя коррекцию искажения и обработку вращения для видеоданных на основе информации времени прорисовки и информации линии прорисовки, вводимой из узла 53 формирования времени прорисовки, информации направления перемещения человека, вводимой из узла 7 считывания, и информации угла поворота, вводимой из механизма 61 поворота модулей, и отправляет данные яркости для каждого цвета в узел 54 модуляции источника света на основе результата вычисления. Обработка вращения видеоданных описана ниже.
Узел 54 модуляции источника света выполняет модуляцию источников 320r, 320g и 320b света через возбуждающую схему 310r, 310g и 310b, соответственно, на основе данных яркости для каждого цвета, вводимых из узла 52 вычисления видеоданных. В частности, узел 54 модуляции источника света включает/отключает или регулирует (увеличивает или уменьшает) вывод каждого из источников 320r, 320g и 320b света.
Узел 43 обнаружения угла на стороне оптического сканера 41 обнаруживает угол и угол качания подвижной пластины 411a и отправляет информацию угла и угла качания (информацию угла подвижной пластины 411a) в узел 53 формирования времени прорисовки и узел 55 вычисления угла качания устройства 5 управления активацией. Узел 44 обнаружения угла на стороне оптического сканера 42 обнаруживает угол подвижной пластины 421a и отправляет информацию угла (информацию угла подвижной пластины 421a) в узел 56 индикации угла устройства 5 управления активацией.
Когда прорисовка текущей линии L прорисовки завершается, и информация угла качания подвижной пластины 411a вводится из узла 43 обнаружения угла, узел 53 формирования времени прорисовки отправляет синхронно с этим информацию целевого угла (индикатор угла), которая указывает целевой угол подвижной пластины 421a, когда лазерное излучение LL применяется к начальной точке прорисовки линии L прорисовки для следующей прорисовки. Целевой угол подвижной пластины 421a задается так, что смежные начальные точки прорисовки имеют фиксированные интервалы между собой в вертикальном направлении. Узел 56 индикации угла сравнивает угол подвижной пластины 421a, обнаруживаемый посредством узла 44 обнаружения угла, с целевым углом подвижной пластины 421a, выполняет коррекцию, чтобы исключать разность, и отправляет данные возбуждения в узел 427 возбуждения оптического сканера 42.
Узел 427 возбуждения возбуждает оптический сканер 42 (прикладывает напряжение к обмотке) на основе данных возбуждения. Таким образом, когда лазерное излучение LL применяется к начальной точке прорисовки, угол подвижной пластины 421a составляет целевой угол.
В варианте осуществления, угловая скорость подвижной пластины 421a может быть фиксированной от начальной точки прорисовки до конечной точки прорисовки в каждой линии L прорисовки, и скорость сканирования в вертикальном направлении с помощью лазерного излучения LL может быть фиксированной. Альтернативно, угловая скорость подвижной пластины 421a может постепенно изменяться, и скорость сканирования в вертикальном направлении с помощью лазерного излучения LL может постепенно изменяться.
Узел 53 формирования времени прорисовки отправляет информацию линии прорисовки, т.е. информацию положения в вертикальном направлении линии L прорисовки для следующей прорисовки в узел 55 вычисления угла качания.
Узел 55 вычисления угла качания использует считывание калибровочной линии из узла 57 хранения калибровочной линии и определяет целевой угол качания подвижной пластины 411a в линии L прорисовки для следующей прорисовки на основе информации положения в вертикальном направлении линии L прорисовки для следующей прорисовки, вводимой из узла 53 формирования времени прорисовки. Затем, на основе информации угла качания подвижной пластины 411a, вводимой из узла 43 обнаружения угла, и целевого угла качания подвижной пластины 411a узел 55 вычисления угла качания отправляет данные возбуждения в узел 417 возбуждения оптического сканера 41 так, что угол качания подвижной пластины 411a становится равным целевому углу качания.
В узле 57 хранения калибровочной линии, сохраняются калибровочные линии, к примеру, как таблицы и вычислительные выражения (функции), показывающие соотношение между положением лазерного излучения LL в вертикальном направлении на поверхности 91 отображения при сканировании поверхности 91 отображения (положением линии L прорисовки в вертикальном направлении) и углом качания подвижной пластины 411a, так что амплитуда лазерного излучения LL в светоизлучающем состоянии является постоянной вдоль вертикального направления. При прорисовке изображения, калибровочная линия используется, и на основе положения лазерного излучения LL в вертикальном направлении на поверхности 91 отображения при сканировании поверхности 91 отображения определяется целевое значение угла качания (целевой угол качания). Калибровочная линия может быть определена посредством вычислений и сохраняется ранее в узле 57 хранения калибровочной линии.
Узел 417 возбуждения прикладывает, на основе данных возбуждения, эффективное напряжение одной частоты как резонансной частоты оптического сканера 41 к обмотке 415, чтобы передавать электрический ток, формирует предварительно определенное магнитное поле и изменяет величину эффективного значения тока и разности фаз в оптическом сканере 41 и форму сигнала возбуждения, тем самым подавая энергию в оптический сканер 41 или, наоборот, забирая энергию из оптического сканера 41. Таким образом, угол качания подвижной пластины 411a в резонансном движении становится равным целевому углу качания. Таким образом, на основе информации (результата определения) угла качания подвижной пластины 411a, обнаруживаемого посредством узла 43 обнаружения угла, и целевого угла качания (целевого значения), угол качания подвижной пластины 411a регулируется так, что угол качания подвижной пластины 411a равен целевому углу качания, и одновременно, каждая линия L прорисовки области 911 прорисовки сканируется последовательно с помощью лазерного излучения LL, чтобы прорисовывать изображение.
Более конкретно, проектор 2 выполняет сканирование в вертикальном направлении (в дальнейшем также называемым просто "вертикальным сканированием") в каждом из прямого прохода и обратного прохода, и в каждом из прямого прохода и обратного прохода вертикального сканирования выполняет сканирование в горизонтальном направлении (в дальнейшем также называемым просто "горизонтальным сканированием") в каждом из прямого прохода и обратного прохода, чтобы отображать (прорисовывать) изображение на поверхности 91 отображения.
При выполнении горизонтального сканирования проектор 2 выполнен с возможностью регулировать угол качания подвижной пластины 411a так, что амплитуда в горизонтальном направлении лазерного излучения LL на поверхности 91 отображения (в дальнейшем также называемая просто "амплитудой лазерного излучения (свет) LL") в светоизлучающем состоянии, в котором лазерное излучение LL испускается из модуля 3 источника света (в дальнейшем также называемым просто "светоизлучающим состоянием"), является постоянной вдоль вертикального направления по сравнению со случаем, когда регулирование (регулирование посредством модуля регулирования) угла качания не выполняется, причем центральная ось J1 поворота подвижной пластины 411a используется в качестве центра (в дальнейшем также называемого просто "углом качания подвижной пластины 411a"). В частности, предпочтительно использовать конфигурацию, в которой угол качания подвижной пластины 411a регулируется так, что амплитуда лазерного излучения LL в светоизлучающем состоянии является постоянной вдоль вертикального направления. Это позволяет предотвращать трапецеидальное искажение изображения при одновременном увеличении относительного отверстия во времени. В варианте осуществления, в качестве характерного случая приводится описание случая, в котором регулирование выполняется так, что амплитуда является постоянной вдоль вертикального направления.
Амплитуда (диапазон сканирования) упоминается как расстояние (интервал) в горизонтальном направлении между положением лазерного излучения LL на плоскости, идентичной плоскости поверхности 91 отображения, когда подвижная пластина 411a поворачивается по часовой стрелке (в предварительно определенном направлении) до максимального угла в светоизлучающем состоянии, и положением лазерного излучения LL на плоскости, идентичной плоскости поверхности 91 отображения, когда подвижная пластина 411a затем поворачивается против часовой стрелки (в направлении, противоположном вышеуказанному направлению) до максимального угла, т.е. длине в горизонтальном направлении каждой из множества линий L прорисовки (линий сканирования), которые являются дорожками лазерного излучения LL на поверхности 91 отображения, когда поверхность 91 отображения сканируется двумерно с помощью лазерного излучения LL в светоизлучающем состоянии, как показано на фиг. 7A и 7B.
Как показано на фиг. 7A и 7B, множество линий L прорисовки размещается в зигзагообразном шаблоне. Каждый из левого конца и правого конца каждой из линий L прорисовки не является подходящим для прорисовки, поскольку светоотражательный узел 411e оптического сканера 41 имеет небольшую угловую частоту (скорость). По этой причине, область для области, сформированной посредством множества линий L прорисовки за исключением левого конца и правого конца, задается равной области 912 для прорисовки, которая является областью, в которой изображение может отображаться.
Область 911 прорисовки, которая является областью, в которой изображение рисуется (отображается), задается (см. фиг. 11A и 11B) в пределах области 912 для прорисовки, и область 913 вращения при прорисовке, которая является областью, в которой область 911 прорисовки может задаваться (вращаясь в пределах области 912 для прорисовки, как описано ниже), задается.
Область 913 вращения при прорисовке имеет круговую форму и задается так, что диаметр практически равен меньшей из длины в горизонтальном направлении и длины в вертикальном направлении области 912 для прорисовки, описанной выше.
Область 911 прорисовки задается в пределах вышеуказанной области 913 вращения при прорисовке. В частности, область 911 прорисовки может вращаться в пределах области 913 вращения при прорисовке, и угол вращения может задаваться произвольно, как описано ниже.
В варианте осуществления, область 911 прорисовки задается так, чтобы иметь прямоугольную форму (включающую в себя квадратную форму). Область 911 прорисовки задается так, что центр совпадает с центром области 913 вращения при прорисовке, и что длина диагональной линии равна диаметру области 913 вращения при прорисовке. Таким образом, область 911 прорисовки может вращаться в пределах области 913 вращения при прорисовке, при этом форма и область области 911 прорисовки, описанные ниже, сохраняются постоянными. Следует отметить, что форма области 911 прорисовки не ограничивается вышеуказанной прямоугольной формой, и, например, может использоваться круговая форма, эллиптическая форма, треугольная форма, пятиугольная форма и т.п.
Когда угол качания подвижной пластины 411a оптического сканера 41 является постоянным, амплитуда лазерного излучения LL в светоизлучающем состоянии изменяется в соответствии с углом подвижной пластины 421a оптического сканера 42 и является более длинной по мере того, как положение в вертикальном направлении на поверхности 91 отображения, сканируемой с помощью лазерного излучения LL (положение в вертикальном направлении линии L прорисовки), располагается дальше от проектора 2. Устройство 5 управления активацией регулирует угол качания подвижной пластины 411a в соответствии с углом подвижной пластины 421a. В частности, угол качания подвижной пластины 411a уменьшается по мере того, как положение в вертикальном направлении на поверхности 91 отображения, сканируемой с помощью лазерного излучения LL (положение в вертикальном направлении линии L прорисовки), располагается дальше от проектора 2, так что амплитуда лазерного излучения LL в светоизлучающем состоянии сохраняется постоянной вдоль вертикального направления.
В устройстве 1 формирования изображений, угол и угловая скорость подвижной пластины 421a предпочтительно регулируются так, что смежные из линий L прорисовки с нечетным номером от начала имеют фиксированные интервалы (шаги) в вертикальном направлении, а смежные из линий L прорисовки с четным номером от начала имеют фиксированные интервалы (шаги) в вертикальном направлении в области 911 прорисовки. Это позволяет предотвращать искажение в вертикальном направлении изображения.
В варианте осуществления, например, на левом конце и правом конце области 911 прорисовки в начале прорисовки каждой из линий L прорисовки, угол подвижной пластины 421a регулируется так, что смежные линии L прорисовки имеют фиксированные интервалы в вертикальном направлении, и угловая скорость подвижной пластины 421a задается равной предварительно определенному значению. В частности, угол подвижной пластины 421a регулируется так, что смежные начальные точки прорисовки имеют фиксированные интервалы в вертикальном направлении для каждой из линий L прорисовки, и угловая скорость подвижной пластины 421a задается равной предварительно определенному значению для каждой из линий L прорисовки. По мере того, как положение в вертикальном направлении линии L прорисовки располагается дальше от проектора 2, угловая скорость подвижной пластины 421a задается равной меньшему значению. Это позволяет предотвращать искажение в вертикальном направлении изображения посредством относительно простого управления.
Узел 53 формирования времени прорисовки выполняет управление тем, должна прорисовка выполняться в нечетном кадре (кадре с нечетным номером) или четном кадре (кадре с четным номером), и, соответственно, определяет направление поворота (направление перемещения) подвижной пластины 421a и порядок считывания видеоданных из узла 51 хранения видеоданных. В частности, считывание видеоданных для прорисовки изображения в кадре с нечетным номером (прямой проход сканирования в вертикальном направлении) выполняется в обратном порядке относительно считывания для прорисовки изображения в кадре с четным номером (обратный проход сканирования в вертикальном направлении).
Идентичная линия на поверхности 91 отображения сканируется с помощью лазерного излучения LL в кадре с нечетным номером и кадре с четным номером. Другими словами, сканирование с помощью лазерного излучения LL выполняется так, что каждая линия L прорисовки в кадре с нечетным номером совпадает с каждой из линий L прорисовки в кадре с четным номером.
В частности, например, как показано на фиг. 7A и 7B, прорисовка начинается с левой верхней стороны и выполняется в зигзагообразном шаблоне к нижней правой стороне первого кадра (кадра с нечетным номером). Во втором кадре (кадре с четным номером), направление поворота подвижной пластины 421a изменяется на противоположное вышеуказанному, и прорисовка выполняется наоборот от нижней правой к верхней левой стороне. Затем, прорисовка выполняется от верхней левой к нижней правой стороне в кадрах с нечетным номером, и прорисовка выполняется от нижней правой к верхней левой стороне в кадрах с четным номером аналогично.
Хотя прямой проход сканирования в вертикальном направлении задается для кадра с нечетным номером, а обратный проход сканирования в вертикальном направлении задаются для кадра с четным номером в варианте осуществления, изобретение не ограничено этим. Обратный проход сканирования в вертикальном направлении может задаваться для кадра с нечетным номером, а прямой проход сканирования в вертикальном направлении могут задаваться для кадра с четным номером.
Хотя положение, в котором прорисовка начинается в первом кадре, является верхней левой стороной в варианте осуществления, изобретение не ограничено этим. Например, это положение может быть правой верхней стороной, левой нижней стороной, правой нижней стороной и т.п.
Помимо этого, можно сканировать различные линии на поверхности 91 отображения с помощью лазерного излучения LL между кадрами с нечетным номером и кадрами с четным номером.
Угол качания подвижной пластины 411a и угол качания подвижной пластины 421a при прорисовке изображения изменяются во времени, как описано ниже.
Как показано на фиг. 8, при горизонтальном сканировании, угол качания подвижной пластины 411a постепенно увеличивается с минимального угла и достигает максимального угла, затем постепенно уменьшается и достигает минимального угла, снова увеличивается постепенно, и после этого операция, описанная выше, повторяется аналогичным образом. Поскольку угол качания подвижной пластины 411a резко не изменяется, угол качания подвижной пластины 411a оптического сканера 41 в форме операции с резонансом может регулироваться легко и надежно. Следует отметить, что фиг. 8 показывает переходы максимального угла качания (амплитуда) подвижной пластины 411a для удобства описания.
Как показано на фиг. 9, при вертикальном сканировании, угол качания подвижной пластины 421a постепенно увеличивается с минимального угла и достигает максимального угла, затем постепенно уменьшается и достигает минимального угла, снова увеличивается постепенно, и после этого операция, описанная выше, повторяется аналогичным образом. Поскольку угол качания подвижной пластины 421a не изменяется резко, угол качания подвижной пластины 421a оптического сканера 42 может регулироваться легко и надежно. Период без отображения (период без прорисовки), в котором не выполняется прорисовка изображения, предоставляется между периодом отображения (периодом прорисовки), в котором прорисовка изображения выполняется в кадре с нечетным номером (прямой проход сканирования в вертикальном направлении), и периодом отображения, в котором прорисовка изображения выполняется в кадре с четным номером (обратный проход сканирования в вертикальном направлении). В периоде отображения каждое время может регулироваться, к примеру, время, в которое начинается прорисовка следующего кадра. Фиг. 9 не показывает изменения максимального угла качания (амплитуды) подвижной пластины 421a, а показывает изменения угла поворота подвижной пластины 421a для удобства описания, и максимальный угол качания (амплитуда) подвижной пластины 421a является постоянным.
Прорисовка изображения выполняется как в прямом проходе, так и обратном проходе сканирования в вертикальном направлении, т.е. при повороте подвижной пластины 421a в предварительно определенном направлении и при повороте в противоположном направлении, так что какой-либо период обратного хода, как в предшествующем уровне техники, не требуется, и период без отображения может сокращаться. Это позволяет улучшать светосилу во времени (соотношение периода, в который прорисовка изображения выполняется).
В частности, поскольку период без отображения в вертикальном направлении в одном кадре может сокращаться посредством прямой и обратной прорисовки, вертикальное относительное отверстие во времени может увеличиваться. На угловой частоте (скорости) подвижной пластины 411a, идентичной угловой частоте (скорости), когда изображение рисуется посредством выполнения горизонтального сканирования только в прямом проходе вертикального сканирования, число кадров в единицу времени может быть увеличено по сравнению со случаем, в котором прорисовка изображения выполняется только в прямом проходе. Таким образом, быстрые перемещения в движущемся изображении могут легко поддерживаться. Наоборот, если число кадров в единицу времени является идентичным числу кадров, когда изображение рисуется посредством выполнения горизонтального сканирования только в прямом проходе вертикального сканирования, угловая скорость подвижной пластины 411a может быть уменьшена по сравнению со случаем, в котором прорисовка изображения выполняется только в прямом проходе, тем самым позволяя стабильно прорисовывать изображение. Когда угловая скорость подвижной пластины 411a не изменяется в вышеописанном случае, прорисовка может выполняться с более высоким разрешением по вертикали.
Фактически, подвижные пластины 411a и 421a оптических сканеров 41 и 42 могут иметь высокую инерцию (инерционный момент), и подвижные пластины 411a и 421a могут не следовать мгновенно. В таком случае, например, ток возбуждения для оптических сканеров 41 и 42, может задаваться равным нулю, или оптические сканеры 41 и 42 могут возбуждаться в противоположной фазе (торможение).
Согласно устройству 5 управления активацией, как описано выше, может улучшаться относительное отверстие во времени, и трапецеидальное искажение может предотвращаться без резкого изменения угла качания подвижных пластин 411a и 421a.
Поскольку горизонтальное сканирование выполняется для того, чтобы прорисовывать изображение в каждом из прямого прохода и обратного прохода вертикального сканирования, резкие изменения угла качания подвижной пластины 421a не требуются при переключении прямого прохода на обратный проход или при переключении обратного прохода на прямой проход в вертикальном сканировании. Это позволяет регулировать угол качания подвижной пластины 421a легко и надежно.
Форма и т.п. области 912 для прорисовки не ограничена вышеуказанной. Например, в проекторе 2, показанном на фиг. 10A и 10B, амплитуда лазерного излучения LL в светоизлучающем состоянии не является постоянной вдоль вертикального направления, но угол качания подвижной пластины 411a регулируется так, что амплитуда лазерного излучения LL в светоизлучающем состоянии является постоянной вдоль вертикального направления по сравнению со случаем, в котором регулирование угла качания подвижной пластины 411a не выполняется. Это уменьшает ширину на верхней стороне области 912 для прорисовки, в которой может прорисовываться изображение. Форма области 912 для прорисовки является близкой к прямоугольной форме (включающей в себя квадратную форму), и можно уменьшать область без прорисовки, которая является областью, в которой прорисовка не выполняется.
В проекторе 2, область 912 для прорисовки задается на поверхности 91 отображения. В пределах области 912 для прорисовки, задается область 913 вращения при прорисовке, которая является областью, в которой может задаваться область 911 прорисовки, которая является областью, в которой изображение рисуется (отображается) (вращающейся в пределах области 912 для прорисовки, как описано ниже).
Обработка вращения видеоданных
Обработка вращения видеоданных в узле 52 вычисления видеоданных, описанном выше, далее описывается подробно.
Как описано выше, в варианте осуществления, область 911 прорисовки, имеющая прямоугольную форму (включающую в себя квадратную форму), задается так, что центр совпадает с центром области 913 вращения при прорисовке, и что длина диагональной линии равна диаметру области 913 вращения при прорисовке.
Устройство 5 управления активацией дает возможность вращения области 911 прорисовки и изображения g в пределах области 913 вращения при прорисовке посредством использования центра области 911 прорисовки или области 913 вращения при прорисовке в качестве оси вращения.
Более конкретно, узел 52 вычисления видеоданных устройства 5 управления активацией выполняет обработку вращения видеоданных, сохраненных в узле 51 хранения видеоданных, чтобы выполнять вращение области 911 прорисовки и изображения g, как описано выше.
В варианте осуществления, когда обработка вращения видеоданных не выполняется в узле 52 вычисления видеоданных, как показано на фиг. 11A, направление сверху вниз изображения g и области 911 прорисовки, сформированной на поверхности 91 отображения, идет в вертикальном направлении. Другими словами, направление сверху вниз изображения g и области 911 прорисовки является параллельным с центральной линией горизонтального сканирования. Термин "центральная линия горизонтального сканирования" упоминается как сегмент линии, выступающий в качестве центра амплитуды при горизонтальном сканировании с помощью лазерного излучения LL (сегмент линии (прямая линия), проходящий через центр множества линий L прорисовки) (то же применимо к нижеприведенному описанию). Хотя вариант осуществления описывается, в качестве примера, в случае, если направление сверху вниз изображения g является параллельным с горизонтальным направлением в начальной настройке, направление сверху вниз изображения g в начальной настройке (ориентация изображения g) не ограничено этим и может идти в вертикальном направлении или может идти в направлении, наклоненном относительно горизонтального направления и вертикального направления.
С другой стороны, когда обработка вращения видеоданных выполняется в узле 52 вычисления видеоданных, как показано на фиг. 11B, направление сверху вниз изображения g и области 911 прорисовки, сформированной на поверхности 91 отображения, идет в направлении, вращаемом (наклоненном) под предварительно определенным углом (углом θ вращения) относительно горизонтального направления. Другими словами, направление сверху вниз изображения g и области 911 прорисовки является параллельным с направлением, вращаемым под углом θ относительно центральной линии горизонтального сканирования.
При такой обработке вращения удовлетворяются следующие выражения (1) и (2), где (CX, CY) представляют координаты центра (центра вращения) изображения g и области 911 прорисовки, (X1, Y1) представляют координаты изображения g и области 911 прорисовки в состоянии, показанном на фиг. 11A (перед обработкой вращения), (X2, Y2) представляют координаты изображения g и области 911 прорисовки в состоянии, показанном на фиг. 11B (после обработки вращения), и θ представляет угол вращения (т.е. угол обработки вращения) изображения g и области 911 прорисовки от состояния, показанного на фиг. 11A, к состоянию, показанному на фиг. 11B.
X1=(X2-CX)×cos(θ)-(Y2-CY)×sin(θ)+CX
Y1=(X2-CX)×sin(θ)+(Y2-CY)×cos(θ)+CY
На основе выражений (1) и (2), узел 52 вычисления видеоданных выполняет обработку вращения видеоданных, сохраненных в узле 51 хранения видеоданных.
Такая обработка вращения не ограничивается конкретным образом. Например, обработка может выполняться посредством вычисления порядка считывания видеоданных для каждого пиксела из узла 51 хранения видеоданных на основе вышеуказанных выражений (1) и (2) и последовательного считывания видеоданных для каждого пиксела из узла 51 хранения видеоданных на основе результатов вычисления.
В дополнение к вышеуказанному, такая обработка вращения также может выполняться посредством формирования видеоданных после коррекции через известную обработку вращения для каждого кадра видеоданных, сохраненного в узле 51 хранения видеоданных, и посредством использования видеоданных после коррекции.
В варианте осуществления, угол θ вращения обработки вращения в узле 52 вычисления видеоданных определяется на основе информации направления перемещения человека, вводимой из узла 7 считывания, описанного ниже, и информации угла вращения, вводимой из механизма 61 поворота модулей, описанного ниже. Угол θ вращения описывается ниже.
Как описано выше, поскольку устройство 5 управления активацией имеет функцию выполнения обработки вращения видеоданных, изображение g может вращаться, причем часть около центра выступает в качестве оси вращения.
В частности, поскольку устройство 5 управления активацией имеет узел 51 хранения видеоданных, который сохраняет видеоданные, узел 52 вычисления видеоданных, который имеет функцию выполнения обработки вращения видеоданных, сохраненных в узле 51 хранения видеоданных, и узел 54 модуляции источника света, который возбуждает модуль 3 источника света на основе результатов вычисления узла 52 вычисления видеоданных, как описано выше, видеоданные могут подвергаться обработке вращения последовательно, чтобы изменять ориентацию изображения g.
Узел изменения положения прорисовки
Далее описывается узел 6 изменения положения прорисовки.
Как показано на фиг. 3, узел 6 изменения положения прорисовки имеет механизм 61 поворота модулей и механизм 62 поворота сканера.
Механизм 61 поворота модулей имеет функцию поворота модуля источника света (светоизлучающего узла) 3 и узла 4 оптического сканирования, описанных выше вместе (как модуль). В варианте осуществления, механизм 61 поворота модулей поворачивает модуль 3 источника света (светоизлучающий узел) и узел 4 оптического сканирования, чтобы изменять угол проекции, чтобы перемещать область 911 прорисовки и изображение g, главным образом, в направлении горизонтального сканирования, описанного выше.
Как показано на фиг. 12, механизм 61 поворота модулей имеет несущий узел 611, который поддерживает модуль 3 источника света и узел 4 оптического сканирования так, чтобы они были поворотными, и мотор 612, который поворачивает несущий узел 611.
Несущий узел 611 имеет осевой узел 613 с осевой линией X1 в качестве центральной оси. Осевой узел 613 присоединен к узлу 111 присоединения кожуха 11 через подшипник 614.
Таким образом, модуль 3 источника света и узел 4 оптического сканирования могут поворачиваться вокруг предварительно определенной осевой линии X1 вместе с несущим узлом 611. Объединенный поворот модуля 3 источника света и узла 4 оптического сканирования может изменять положения области 911 прорисовки и изображения g без необходимости регулирования совмещения модуля 3 источника света и узла 4 оптического сканирования.
В варианте осуществления, предварительно определенная осевая линия X1 задается вдоль вертикального направления. В частности, механизм 61 поворота модулей поворачивает модуль 3 источника света и узел 4 оптического сканирования вокруг осевой линии, ортогональной к поверхности 91 отображения. Это позволяет перемещать область 911 прорисовки и изображение g в направлении горизонтального сканирования при подавлении искажения вследствие изменения положения области 911 прорисовки. В таком случае, если изображение g перемещается к горизонтальному сканированию без изменения ориентации изображения g, как описано ниже, соотношение между направлением горизонтального сканирования и ориентацией изображения g смещается вместе с перемещением. Тем не менее, такое смещение может быть скорректировано посредством изменения ориентации изображения g, как описано ниже. Как результат, преимущества применения изобретения являются значительными в таком случае.
Несущий узел 611 содержит первую шестерню 615. Первая шестерня 615 имеет множество зубьев, выровненных вдоль кругового направления осевого узла 613 (осевой линии X1).
С другой стороны, мотор 612 имеет осевой узел 616, который вращается вокруг осевой линии. Вторая шестерня 617, которая зацепляется с вышеуказанной первой шестерней 615, присоединена к осевому узлу 616. Вторая шестерня 617 имеет множество зубьев, выровненных вдоль кругового направления осевого узла 616.
Мотор 612, как описано выше, присоединен к вышеуказанному узлу 111 присоединения, чтобы вращать вторую шестерню 617.
Более конкретно, как показано на фиг. 13A, мотор 612 вращает вторую шестерню 617 против часовой стрелки, чтобы вращать несущий узел 611 вокруг осевого узла 613 по часовой стрелке. Это позволяет перемещать направление испускания лазерного излучения LL (т.е. положение области 911 прорисовки) к правой стороне на фиг. 13A. С другой стороны, как показано на фиг. 13B, мотор 612 вращает вторую шестерню 617 по часовой стрелке, чтобы вращать несущий узел 611 вокруг осевого узла 613 против часовой стрелки. Это позволяет перемещать направление испускания лазерного излучения LL (т.е. положение области 911 прорисовки) к левой стороне на фиг. 13A и 13B.
Поскольку механизм 61 поворота модулей (узел поворота модулей), как описано выше, вращает модуль 3 источника света и узел 4 оптического сканирования вместе, можно расширять диапазон, в котором может изменяться узел отображения изображения g (положение области 911 прорисовки) (диапазон, в котором изображение g может отображаться). Регулирование совмещения модуля 3 источника света и узла 4 оптического сканирования не должно выполняться отдельно для изменения положения области 911 прорисовки, так что конструкция и изготовление проектора 2 может упрощаться. Следует отметить, что механизм 61 поворота модулей (узел поворота модулей) может вращать модуль 3 источника света и узел 4 оптического сканирования вместе не только вокруг осевой линии X1, но также и вокруг осевой линии, ортогональной к осевой линии X1. В таком случае, область 911 прорисовки может быть перемещена двумерным образом, даже когда механизм 62 поворота сканера, описанный ниже, опускается.
С другой стороны, механизм 62 поворота сканера имеет функцию поворота оптического сканера 42 для вертикального сканирования, описанного ранее. В варианте осуществления, механизм 62 поворота сканера поворачивает оптический сканер 42, чтобы перемещать область 911 прорисовки и изображение g, главным образом, в направлении вертикального сканирования, описанного выше.
Как показано на фиг. 14, механизм 62 поворота сканера имеет несущий узел 621, который поддерживает оптический сканер 42 для вертикального сканирования, описанного выше, и мотор 622, который поворачивает несущий узел 621.
Мотор 622 имеет осевой узел 623, который поворачивается вокруг осевой линии. Несущий узел 621 присоединен к осевому узлу 623.
Мотор 622 присоединен (закреплен) к несущему узлу 611 вышеуказанного механизма 61 поворота модулей, хотя это не показано.
Мотор 622 поворачивает оптический сканер 42 вокруг осевой линии осевого узла 623 (в частности, осевой линии, совпадающей с центральной осью J2 поворота) вместе с несущим узлом 621. Это позволяет перемещать направление испускания лазерного излучения LL (т.е. положение области 911 прорисовки) в направлении вертикального сканирования.
Поскольку механизм 62 поворота сканера (узел поворота сканера), как описано выше, поворачивает весь оптический сканер 42 относительно модуля 3 источника света, можно расширять диапазон, в котором может изменяться положение отображения изображения g (положение области 911 прорисовки) (диапазон, в котором изображение может отображаться). В частности, в варианте осуществления, механизм 62 поворота сканера поворачивает оптический сканер 42 на передней стороне в направлении движения лазерного излучения LL оптических сканеров 41 и 42, так что можно расширять диапазон, в котором положение области 911 прорисовки может изменяться относительно легко. Следует отметить, что механизм 62 поворота сканера (узел поворота сканера) может поворачивать оптический сканер 42 не только вокруг центральной оси J2 поворота, но также и вокруг осевой линии, ортогональной к центральной оси J2 поворота. В таком случае, вышеуказанный механизм 61 поворота модулей может опускаться. Механизм 62 поворота сканера может быть выполнен с возможностью поворачивать оптический сканер 41. В этом случае, поскольку диапазон, в котором может изменяться область 911 прорисовки, ограничивается областью светоотражательного узла 421e оптического сканера 42, область светоотражательного узла 421e должна увеличиваться, чтобы расширять этот диапазон.
Как описано выше, узел 6 изменения положения прорисовки может двумерно изменять положение области 911 прорисовки на поверхности 91 отображения.
Устройство 1 формирования изображений, как описано выше, включает в себя модуль 3 источника света и узел 4 оптического сканирования, как описано выше, и использует лазерное излучение, так что устройство 1 формирования изображений не имеет фокусировки, непосредственная проекция может выполняться, и положение области 911 прорисовки может регулироваться в произвольном положении без ограничения посредством положения установки проектора 2. Поскольку использование лазерного излучения позволяет опускать или упрощать оптическую систему, такую как линзы для предоставления направленного света, можно уменьшать размер модуля 3 источника света и тем самым размер устройства 1 формирования изображений.
Поскольку проектор 2 использует оптические сканеры 41 и 42, как описано выше, конфигурация является относительно простой.
Хотя поверхность 91 отображения размещается на поверхности пола для пола 9, как описано выше в варианте осуществления, проектор 2 (кожух 11) размещается на поверхности W1 стены для стены W, ортогональной к полу 9.
Таким образом, оптическая длина пути света, испускаемого из проектора 2, может сокращаться, например, по сравнению со случаем, в котором проектор 2 размещается на поверхности потолка для потолка, а поверхность 91 отображения размещается на поверхности пола для пола 9. Это позволяет, например, предотвращать или подавлять блокирование света, испускаемого из проектора 2, пешеходом и т.п. Как результат, требуемое изображение может отображаться на поверхности 91 отображения без влияния окружения (к примеру, плотности населения). Помимо этого, поскольку поверхность размещения проектора 2 является поверхностью W1 стены, можно предотвращать или подавлять блокирование проектора 2 проходящим пешеходом и т.п.
Размещение проектора 2 на поверхности W1 стены и размещение поверхности 91 отображения на поверхности пола для пола 9 дает возможность человеку, присутствующему около устройства 1 формирования изображений, распознавать присутствие изображения легко в пределах или за пределами конструкции. Например, когда изображение для рекламы, к примеру, коммерческая реклама и видео для продвижения товаров и услуг используются в качестве выводимого изображения, может предоставляться превосходная рекламная функция.
Узел считывания
Узел 7 считывания имеет функцию считывания того, присутствует или нет человек H в пределах области S считывания, заданной около поверхности 91 отображения, и считывания состояния перемещения человека H, когда человек H присутствует в пределах области S считывания (см. фиг. 15).
Как показано на фиг. 2, узел 7 считывания имеет датчик 71 обнаружения человека, узел 72 хранения и узел 73 вычисления.
Датчик 71 обнаружения человека имеет функцию считывания того, присутствует или нет человек H в пределах области S считывания, и считывания положения человека H, когда человек H присутствует в пределах области S считывания.
Датчик 71 обнаружения человека, описанный выше, присоединяется к вышеуказанному кожуху 11. Хотя датчик 71 обнаружения человека присоединяется к кожуху 11 в варианте осуществления, изобретение не ограничено этим, и датчик 71 обнаружения человека может не присоединяться к кожуху 11, а может размещаться независимо на поверхности W1 стены и т.п.
Датчик 71 обнаружения человека может считывать присутствие или отсутствие человека H около датчика 71 обнаружения человека и может измерять пространственное расстояние между датчиком 71 обнаружения человека и считываемым человеком H и его направлением.
Датчик 71 обнаружения человека, описанный выше, не ограничивается конкретным образом до тех пор, пока вышеуказанная функция может предоставляться. Например, можно использовать один из инфракрасного датчика, использующего инфракрасные лучи, ультразвукового датчика, использующего ультразвук, лазерного датчика (лазерного измерителя смещений), использующего лазерное излучение, датчика CCD-изображений и т.п., или два датчика в комбинации.
Как показано на фиг. 15, для датчика 71 обнаружения человека, описанного выше, задается область S считывания, которая является областью, в которой определяется присутствие или отсутствие и положение человека
Область S считывания имеет полукруглую форму, причем датчик 71 обнаружения человека располагается как центр при просмотре от направления вертикальной линии (выше).
Область S считывания задается так, чтобы включать в себя диапазон, в который положение области 911 прорисовки может быть перемещено с проектором 2 при просмотре от направления вертикальной линии (выше). В варианте осуществления, область S считывания задается так, чтобы практически совпадать с диапазоном, в который положение области 911 прорисовки может быть перемещено с проектором 2 при просмотре от направления вертикальной линии (выше).
В варианте осуществления, область S считывания совпадает с эффективной областью считывания датчика 71 обнаружения человека (областью, в которой присутствие или отсутствие человека и положение и направление присутствия может считываться). Область S считывания может не совпадать с эффективной областью считывания датчика 71 обнаружения человека, и требуется только то, чтобы область S считывания включалась в пределы эффективной области считывания датчика 71 обнаружения человека. В этом случае считывание того, присутствует или нет человек в пределах области S считывания, может выполняться посредством осуществления определения на основе положения и направления человека, считываемого, например, посредством датчика 71 обнаружения человека.
Положение, форма и размер области S считывания определяются в соответствии с условиями, такими как положение размещения проектора 2 и содержимое и размер отображаемого изображения, и не ограничены конкретно. Например, форма области S считывания может быть прямоугольной формой, квадратной формой и т.п.
В датчике 71 обнаружения человека, для которого задается область S считывания, когда датчик 71 обнаружения человека считывает присутствие человека H, определяется то, что человек H присутствует в пределах области S считывания. Результат определения (присутствует или нет человек H в пределах области S считывания) передается в устройство 5 управления активацией. Это определение может выполняться в реальном масштабе времени (непрерывно) или может выполняться прерывисто.
Когда датчик 71 обнаружения человека считывает присутствие человека H, датчик 71 вычисляет положение человека H на основе пространственного расстояния между человеком H и датчиком 71 обнаружения человека (в дальнейшем также называемого просто "пространственным расстоянием LI") и направлением сегмента линии, соединяющего датчик 71 обнаружения человека с человеком. Затем, результат вычисления передается в узел 72 хранения и устройство 5 управления активацией.
Узел 72 хранения имеет функцию хранения положения, считываемого посредством вышеуказанного датчика 71 обнаружения человека, как информации положения в течение каждого из предварительно определенных периодов. Такая информация положения для каждого из предварительно определенных периодов может использоваться для того, чтобы вычислять состояние перемещения человека H (в частности, направление перемещения и скорость перемещения).
Информация, сохраненная в узле 72 хранения, вводится в узел 73 вычисления.
Узел 73 вычисления имеет функцию вычисления направления перемещения и скорости перемещения человека H на основе информации положения, сохраненной в узле 72 хранения. Затем, узел 73 вычисления передает результат вычисления (направление перемещения и скорость перемещения человека H) в устройство 5 управления активацией. Такое вычисление может выполняться в реальном масштабе времени (непрерывно) или может выполняться прерывисто.
Узел 7 считывания, как описано выше, считывает положение, направление перемещения и скорость перемещения человека H как состояние перемещения человека H. Это предоставляет прогноз перемещения человека H. Таким образом, изображение g может отображаться в требуемом положении для движущегося человека H.
Поскольку узел 7 считывания имеет датчик 71 обнаружения человека, узел 72 хранения и узел 73 вычисления, как описано выше, положение, направление перемещения и скорость перемещения человека H могут считываться при относительно простой и недорогой конфигурацией.
Хотя узел 7 считывания описан выше, конфигурация узла 7 считывания не ограничивается вышеуказанной конфигурацией. Например, можно использовать один или множество датчиков давления, размещенных под полом в области S считывания.
Число датчиков 71 обнаружения человека не ограничивается одним, как в варианте осуществления, и может составлять два или более.
Узел управления
Узел 8 управления управляет возбуждением проектора 2 на основе результата считывания вышеуказанного узла 7 считывания.
В частности, узел 8 управления управляет возбуждением вышеуказанного узла 6 изменения положения прорисовки на основе результата считывания узла 7 считывания. Это позволяет изменять положение изображения g в зависимости от состояния перемещения человека H. Это дает возможность человеку H легко распознавать содержимое изображения g.
Более конкретно, когда человек H входит в область S считывания, узел 8 управления определяет то, что человек H является объектом. Хотя человек H, который является объектом, присутствует в пределах области S считывания, узел 8 управления изменяет положение области 911 прорисовки в соответствии с положением, направлением перемещения и скоростью перемещения человека H.
Когда множество людей входит в область S считывания, узел 8 управления может определять то, что первый является объектом. Когда множество людей присутствует в пределах области S считывания, ближайший к проектору 2 может быть определен как объект.
Как показано на фиг. 15, когда человек H перемещается в пределах области S считывания, узел 8 управления управляет возбуждением проектора 2 так, что положение области 911 прорисовки изменяется, чтобы оставаться расположенным впереди направления m перемещения человека H. Это приводит к отображению изображения g впереди движущегося человека H, так что движущийся человек H может легко распознавать присутствие и содержимое изображения g.
Требуется только то, что положение области 911 прорисовки (центральное положение) должно быть впереди направления перемещения относительно положения человека H (центрального положения). Когда направление m перемещения человека H используется как база отсчета (0°), оно предпочтительно находится в пределах диапазона от -60° до +60°, более конкретно, в пределах диапазона от -45° до +45°, и более предпочтительно, в пределах диапазона от -30° до +30°. Это дает возможность простого распознавания присутствия и содержимого изображения g человеком H. Далее, приводится описание случая, в котором центральное положение области 911 прорисовки задается на сегменте линии, идущем от положения (центрального положения) человека H к передней стороне направления перемещения человека H.
Узел 8 управления также управляет возбуждением проектора 2 так, что положение области 911 прорисовки непрерывно или прерывисто изменяется в соответствии с перемещением человека H. Это дает возможность простого распознавания присутствия и содержимого изображения g движущимся человеком H.
Узел 8 управления также управляет возбуждением проектора 2 так, что положение области 911 прорисовки поддерживает постоянное пространственное расстояние до положения человека H. Это дает возможность движущемуся человеку H легко видеть присутствие и содержимое изображения g.
Пространственное расстояние между положением (центральным положением) области 911 прорисовки и положением (центральным положением) человека H может быть определенным расстоянием, на котором человек H может распознавать присутствие и содержимое изображения g. Пространственное расстояние зависит от области для области 911 прорисовки и т.п. и не ограничивается конкретным образом, но предпочтительно колеблется от 50 до 300 см, а более предпочтительно, колеблется от 70 до 200 см. Это дает возможность простого распознавания присутствия и содержимого изображения g человеком H.
Напротив, когда пространственное расстояние меньше вышеуказанного нижнего предельного значения, изображение может выходить за пределы видимости человека, если скорость перемещения человека является высокой, и т.п. С другой стороны, когда пространственное расстояние превышает вышеуказанное верхнее предельное значение, человеку трудно распознавать присутствие и содержимое изображения, если область 911 прорисовки или изображение g является небольшой, и т.п.
Как описано выше, узел 8 управления управляет узлом 6 изменения положения прорисовки в соответствии с перемещением человека H, чтобы задавать положение области 911 прорисовки в положении, в котором человек H может легко просматривать изображение.
Определение угла вращения при обработке вращения видеоданных
Далее, выполняется подробное определение для определения (задания) угла вращения при обработке вращения с помощью вышеуказанного устройства 5 управления активацией.
В соответствии с изменением изображения g и области 911 прорисовки, как описано выше, вышеуказанный узел 52 вычисления видеоданных устройства 5 управления активацией определяет угол θ вращения при обработке вращения видеоданных, описанный выше (в дальнейшем также называемый просто "углом θ вращения") на основе информации направления перемещения человека, вводимой из вышеуказанного узла 7 считывания, и информации угла поворота, вводимой из вышеуказанного механизма 61 поворота модулей.
Более конкретно, как показано на фиг. 16, при условии, что центральное положение Pg области 911 прорисовки задается на сегменте линии, идущем от положения (центрального положения) PH человека H к передней стороне направления перемещения человека H, когда лицевая поверхность 91 отображения просматривается сверху (при виде сверху), угол θ вращения при обработке вращения составляет 180°-(α+β), где α представляет угол поворота механизма 61 вращения модулей, и β представляет угол между сегментом LH линии (прямой линией), проходящим через человека H и центр области 911 прорисовки, и центральной линией L0 горизонтального сканирования, когда угол поворота механизма 61 поворота модулей является нулевым.
Угол θ вращения равен углу γ между центральной линией La амплитуды в горизонтальном направлении, когда угол поворота механизма 61 вращения модулей равен a, и сегментом LH линии (прямой линии), проходящим через человека H и центр области 911 прорисовки.
Ориентации изображения g и области 911 прорисовки задаются вдоль сегмента LH линии (прямой линии), проходящего через человека H и центр Pg области 911 прорисовки.
Поскольку устройство 5 управления активацией изменяет ориентацию изображения g на основе угла поворота модуля 3 источника света и узла 4 оптического сканирования с помощью механизма 61 поворота модулей таким образом, ориентация изображения g может изменяться относительно легко в соответствии с положением изображения g.
Как описано выше, ориентации области 911 прорисовки и изображения g могут быть фиксированными относительно ориентации человека H. В частности, в варианте осуществления, ориентация изображения g задается так, что верх и низ изображения g располагаются параллельно с направлением перемещения человека H. Это дает возможность движущемуся человеку H легко просматривать содержимое изображения g.
Поскольку устройство 5 управления активацией изменяет ориентацию изображения g на основе состояния активации узла 6 изменения положения прорисовки, ориентация изображения g может изменяться в соответствии с положением изображения g. Даже когда положение изображения g изменяется вместе с изменением угла проекции, как описано выше, ориентация изображения g может поддерживаться в предварительно определенном состоянии. Как результат, человек H может легко просматривать содержимое изображения g. Напротив, если положение изображения g изменяется без изменения ориентации изображения g, ориентация изображения g может быть наклонена относительно направления сканирования лазерного излучения (горизонтального направления и вертикального направления), что затрудняет просмотр человеком H содержимого изображения g.
В частности, устройство 5 управления активацией изменяет ориентацию изображения g на основе состояния активации узла 6 изменения положения прорисовки и результата считывания узла 7 считывания, так что ориентация изображения может задаваться равной ориентации, при которой человек может легко просматривать его.
Поскольку устройство 5 управления активацией изменяет ориентацию изображения g, чтобы она была фиксированной относительно ориентации человека H, человек H легко просматривает содержимое изображения g.
Согласно устройству 1 формирования изображений варианта осуществления, как описано выше, изображение g может отображаться в положении, в котором человек H может легко просматривать, даже когда человек H перемещается. Таким образом, присутствие и содержимое изображения g могут легко распознаваться движущимся человеком H.
Второй вариант осуществления
Далее описывается вариант 2 осуществления устройства формирования изображений согласно изобретению.
Фиг. 17 является видом сверху для пояснения работы устройства формирования изображений (ориентации изображения) согласно варианту 2 осуществления изобретения.
Далее, устройство формирования изображений варианта 2 осуществления описывается посредством фокусирования на отличных моментах от варианта 1 осуществления, описанных ранее, и описание аналогичных моментов опускается.
Устройство формирования изображений варианта 2 осуществления является практически аналогичным устройству варианта 1 осуществления за исключением способа задания угла θ вращения изображения g и области 911 прорисовки. На фиг. 17, компоненты, аналогичные компонентам в вышеуказанном варианте осуществления, обозначаются идентичными ссылками с номерами.
В настоящем варианте осуществления, ориентации изображения g и области 911 прорисовки задаются так, чтобы они были наклоненными под предварительно определенным углом φ относительно ориентации человека H.
Предварительно определенный угол φ может иметь предварительно установленное фиксированное значение или может быть переменным значением, которое меняется в зависимости от угла α поворота механизма 61 поворота модулей, результата считывания датчика 71 обнаружения человека и т.п.
Более конкретно, как показано на фиг. 17, при условии, что центральное положение Pg области 911 прорисовки задается на сегменте линии, идущем от положения (центрального положения) PH человека H к передней стороне направления перемещения человека H, когда поверхность 91 отображения просматривается сверху (при виде сверху), угол θ вращения при обработке вращения составляет 180°-(α+β)+φ, где α представляет угол поворота механизма 61 вращения модулей, β представляет угол между сегментом LH линии (прямой линией), проходящим через человека H и центр области 911 прорисовки, и центральной линией L0 горизонтального сканирования, когда угол поворота механизма 61 поворота модулей является нулевым, и φ представляет вышеуказанный предварительно определенный угол.
Угол θ вращения равен углу, предоставленному посредством добавления угла φ к углу γ между центральной линией La амплитуды в горизонтальном направлении, когда угол поворота механизма 61 вращения модулей равен a, и сегментом LH линии (прямой линией), проходящим через человека H и центр области 911 прорисовки.
Помимо этого, угол между сегментом Lg линии вдоль ориентаций изображения g и области 911 прорисовки и сегментом LH линии (прямой линии), проходящим через человека H и центр Pg области 911 прорисовки, задается так, чтобы составлять φ.
Как описано выше, ориентации области 911 прорисовки и изображения g могут быть фиксированными относительно ориентации человека H. В частности, ориентация изображения g может задаваться произвольно относительно ориентации человека H. Таким образом, человеку H могут предоставляться различные рекламные эффекты.
Например, предварительно определенный угол φ варьируется в зависимости от угла a поворота механизма 61 поворота модулей, результата считывания датчика 71 обнаружения человека и т.п., так что ориентации изображения g и области 911 прорисовки могут изменяться так, что человек H направлен к конкретной точке.
Вариант 2 осуществления, как описано выше, также может достигать преимуществ, аналогичных преимуществам в варианте 1 осуществления, описанном выше. В частности, поскольку ориентации изображения g и области 911 прорисовки могут задаваться произвольно относительно ориентации области 912 для прорисовки и ориентации человека H, человеку H могут предоставляться различные рекламные эффекты.
Третий вариант осуществления
Далее описывается вариант 3 осуществления устройства формирования изображений согласно изобретению.
Фиг. 18 является видом сверху для пояснения работы устройства формирования изображений (ориентации изображения) согласно варианту 3 осуществления изобретения.
Далее, устройство формирования изображений варианта 3 осуществления описывается посредством фокусирования на отличных моментах от варианта 1 осуществления, описанных ранее, и описание аналогичных моментов опускается.
Устройство формирования изображений варианта 3 осуществления является практически аналогичным устройству варианта 1 осуществления за исключением способа задания угла θ вращения изображения g и области 911 прорисовки. На фиг. 18, компоненты, аналогичные компонентам вышеуказанного варианта осуществления, обозначаются идентичными ссылками с номерами.
В варианте осуществления, ориентации изображения g и области 911 прорисовки задаются так, чтобы они были фиксированными относительно поверхности W1 стены, на которой размещен проектор 2.
Более конкретно, как показано на фиг. 18, угол G вращения при обработке вращения составляет 180°-α, где α представляет угол поворота механизма 61 вращения модулей, когда поверхность 91 отображения просматривается сверху (при виде сверху).
Угол θ вращения равен углу между центральной линией La амплитуды в горизонтальном направлении, когда угол поворота механизма 61 вращения модулей равен a, и сегментом LW линии (прямой линией), проходящим через центр области 911 прорисовки и параллельно с поверхностью W1 стены.
Сегмент линии вдоль ориентаций изображения g и области 911 прорисовки задается так, чтобы он был параллельным с сегментом LW линии (прямой линией), проходящим через центр области 911 прорисовки и параллельно с поверхностью W1 стены.
Как описано выше, ориентации области 911 прорисовки и изображения g могут быть фиксированными относительно поверхности W1 стены. В частности, в варианте осуществления, верх и низ изображения g может задаваться параллельно с поверхностью W1 стены. Это позволяет изменять положения изображения g и области 911 прорисовки при поддержании фиксированных ориентаций (положений) изображения g и области 911 прорисовки относительно поверхности W1 стены.
Вариант 3 осуществления, как описано выше, также может предоставлять преимущества, аналогичные преимуществам в варианте 1 осуществления, описанном выше.
Четвертый вариант осуществления
Далее описывается вариант 4 осуществления устройства формирования изображений согласно изобретению.
Фиг. 19 является видом сверху для пояснения работы устройства формирования изображений (ориентации изображения) согласно варианту 4 осуществления изобретения.
Далее, устройство формирования изображений варианта 4 осуществления описывается посредством фокусирования на отличных моментах от варианта 1 осуществления, описанных ранее, и описание аналогичных моментов опускается.
Устройство формирования изображений варианта 4 осуществления является практически аналогичным устройству варианта 1 осуществления, за исключением способа задания угла θ вращения изображения g и области 911 прорисовки. На фиг. 19, компоненты, аналогичные компонентам вышеуказанного варианта осуществления, обозначаются идентичными ссылками с номерами.
В варианте осуществления, ориентации изображения g и области 911 прорисовки задаются так, чтобы они были наклоненными под предварительно определенным углом φ относительно поверхности W1 стены, на которой размещен проектор 2.
Предварительно определенный угол φ может иметь предварительно установленное фиксированное значение или может быть переменным значением, которое меняется в зависимости от угла a поворота механизма 61 поворота модулей, результата считывания датчика 71 обнаружения человека и т.п.
Более конкретно, как показано на фиг. 19, угол θ вращения при обработке вращения составляет 180°-α+φ, где α представляет угол поворота механизма 61 вращения модулей, и φ представляет вышеуказанный предварительно определенный угол, когда поверхность 91 отображения просматривается сверху (при виде сверху).
Угол θ вращения равен углу, предоставленному посредством добавления угла φ к углу между центральной линией La амплитуды в горизонтальном направлении, когда угол поворота механизма 61 вращения модулей равен α, и сегментом LW линии (прямой линией), проходящим через центр области 911 прорисовки и параллельно с поверхностью W1 стены.
Угол между сегментом Lg линии вдоль ориентаций изображения g и областью 911 прорисовки и сегментом LW сегменте линии (прямой линии), проходящим через центр области 911 прорисовки и параллельно с поверхностью W1 стены, задается так, чтобы составлять φ.
Как описано выше, ориентации области 911 прорисовки и изображения g могут быть в предварительно определенном состоянии относительно поверхности W1 стены. В частности, ориентация изображения g может задаваться произвольно относительно поверхности W1 стены.
Вариант 4 осуществления, как описано выше, также может предоставлять преимущества, аналогичные преимуществам в варианте 1 осуществления, описанном выше.
Пятый вариант осуществления
Далее описывается вариант 5 осуществления устройства формирования изображений согласно изобретению.
Фиг. 20 является схематичным видом сверху, показывающим оптический сканер проектора, включенного в устройство формирования изображений согласно варианту 5 осуществления изобретения. Фиг. 21 является видом в разрезе вдоль линии B-B на фиг. 20. Фиг. 22 является блок-схемой, показывающей узел приложения напряжения узла возбуждения, включенного в оптический сканер, показанный на фиг. 21. Фиг. 23A и 23B являются схемами, показывающими пример напряжения, сформированного в узле формирования первого напряжения и узле формирования второго напряжения, включенных в узел приложения напряжения, показанный на фиг. 21. Далее, для удобства описания, передняя сторона листа упоминается как "верх", обратная сторона листа - как "низ", правая сторона - как "справа" и левая сторона - как "слева" на фиг. 20, и верхняя сторона - как "верх", нижняя сторона - как "низ", правая сторона - как "справа" и левая сторона - как "слева" на фиг. 21.
Далее, устройство формирования изображений варианта 5 осуществления описывается посредством фокусирования на отличных моментах от варианта 1 осуществления, описанных ранее, и описание аналогичных моментов опускается.
Устройство формирования изображений варианта 5 осуществления является практически аналогичным устройству варианта 1 осуществления за исключением того, что оптический сканер, включенный в проектор, имеет другую конфигурацию, и что проход при сканировании в первом направлении (горизонтальное сканирование) на поверхности 91 отображения не является прямым. На фиг. 22, компоненты, аналогичные компонентам вышеуказанного варианта осуществления, обозначаются идентичными ссылками с номерами.
Узел оптического сканирования согласно варианту осуществления имеет один оптический сканер 45 так называемой вибрационной системы с двумя степенями свободы (двумерное сканирование).
Оптический сканер 45 включает в себя базовый корпус 46, включающий в себя первую вибрационную систему 46a, вторую вибрационную систему 46b и несущий узел 46c, как показано на фиг. 20, противоположную подложку 47, размещенную напротив базового корпуса 46, разделительный элемент 48, предоставленный между базовым корпусом 46 и противоположной подложкой 47, постоянный магнит 491 и обмотку 492.
Первая вибрационная система 46a формируется из узла 461a возбуждения формы рамки, предоставленного в несущем узле 46c формы рамки, и пары первых соединительных узлов 462a и 463a, поддерживающих узел 461a возбуждения на несущем узле 46c с обеих сторон.
Вторая вибрационная система 46b формируется из подвижной пластины 461b, предоставленной в узле 461a возбуждения, и пары вторых соединительных узлов 462b и 463b, поддерживающих подвижную пластину 461b на узле 461a возбуждения с обеих сторон.
Узел 461a возбуждения имеет кольцевую форму при виде сверху по фиг. 20. Форма узла 461a возбуждения не ограничивается конкретным образом до тех пор, пока он имеет форму рамки, и, например, он может иметь форму коробчатой рамки при виде сверху по фиг. 20. Постоянный магнит 491 соединяется с нижней поверхностью узла 461a возбуждения, как описано выше.
Каждый из первых соединительных узлов 462a и 463a имеет удлиненную форму и является упруго деформируемым. Первые соединительные узлы 462a и 463a соединяют узел 461a возбуждения с несущим узлом 46c так, что узел 461a возбуждения является поворотным относительно несущего узла 46c. Первые соединительные узлы 462a и 463a, как описано выше, предоставляются коаксиально, и узел 461a возбуждения выполнен с возможностью поворачиваться относительно несущего узла 46c вокруг оси (в дальнейшем называемой "центральной осью J3 поворота").
Пьезоэлектрический элемент 465a для обнаружения угла узла 461a возбуждения (угла поворота вокруг центральной оси J3 поворота) (характера изменения) предоставляется для первого соединительного узла 462a.
Подвижная пластина 461b имеет круговую форму при виде сверху по фиг. 20. Форма подвижной пластины 461b не ограничивается конкретным образом до тех пор, пока она может формироваться в узле 461a возбуждения, и, например, она может иметь эллиптическую форму или иметь коробчатую форму при виде сверху по фиг. 20. Светоотражательный узел 464b, имеющий отражательную способность света, формируется на верхней поверхности подвижной пластины 461b, как описано выше.
Каждый из вторых соединительных узлов 462b и 463b имеет удлиненную форму и является упруго деформируемым. Вторые соединительные узлы 462b и 463b соединяют подвижную пластину 461b с узлом 461a возбуждения так, что подвижная пластина 461b является поворотной относительно узла 461a возбуждения. Вторые соединительные узлы 462b и 463b, как описано выше, предоставляются коаксиально, и подвижная пластина 461b выполнена с возможностью поворачиваться относительно узла 461a возбуждения вокруг оси (в дальнейшем называемой "центральной осью J4 поворота").
Пьезоэлектрический элемент 465b для обнаружения угла подвижной пластины 461b (угла поворота вокруг центральной оси J4 поворота) (характера изменения) предоставляется для второго соединительного узла 462b.
Как показано на фиг. 20, центральная ось J3 поворота и центральная ось J4 поворота являются ортогональными друг другу. Каждый из центров узла 461a возбуждения и подвижной пластины 461b находится в точке пересечения центральной оси J3 поворота и центральной оси J4 поворота при виде сверху по фиг. 20. Далее, точка пересечения центральной оси J3 поворота и центральной оси J4 поворота упоминается также как "точка G пересечения" для удобства описания.
Как показано на фиг. 21, базовый корпус 46, как описано выше, соединен с противоположной подложкой 47 с помощью разделительного элемента 48, вставленного между ними. Обмотка 492, которая формирует магнитное поле, действующее на постоянный магнит 491, предоставляется на верхней поверхности противоположной подложки 47.
Постоянный магнит 491 предоставляется вдоль сегмента линии (этот сегмент линии называется также "сегментом M линии"), проходящего через точку G пересечения и наклоненного относительно каждой из центральной оси J3 поворота и центральной оси J4 поворота при виде сверху по фиг. 20. Постоянный магнит 491, как описано выше, имеет южный полюс на одной стороне продольного направления относительно точки G пересечения и северный полюс на другой стороне. На фиг. 21, левая сторона продольного направления постоянного магнита 491 является южным полюсом, а правая сторона является северным полюсом.
Угол 9 наклона сегмента M линии относительно центральной оси J3 поворота предпочтительно колеблется от 30 до 60 градусов, более предпочтительно колеблется от 40 до 50 градусов, а более предпочтительно равен приблизительно 45 градусам при виде сверху по фиг. 20. Постоянный магнит 491, предоставленный таким образом, может плавно поворачивать подвижную пластину 461b вокруг каждой из центральной оси J3 поворота и центральной оси J4 поворота. В варианте осуществления, сегмент M линии наклонен приблизительно на 45 градусов относительно каждой из центральной оси J3 поворота и центральной оси J4 поворота.
Как показано на фиг. 21, узел 491a паза формируется в верхней поверхности постоянного магнита 491. Узел 491a паза выступает в качестве части зазора для предотвращения контакта между постоянным магнитом 4 и подвижной пластиной 461b. Формирование такого узла 491a паза позволяет не допускать вхождения в контакт подвижной пластины 461b с постоянным магнитом 491 при повороте подвижной пластины 461b вокруг центральной оси J3 поворота.
Обмотка 492 формируется, чтобы окружать внешнюю периферию узла 461a возбуждения при виде сверху по фиг. 20. Это позволяет надежно предотвращать контакт между узлом 461a возбуждения и обмоткой 492 при возбуждении оптического сканера 45. Как результат, пространственное расстояние между обмоткой 492 и постоянным магнитом 491 может относительно уменьшаться, чтобы давать возможность магнитному полю, сформированному из обмотки 492, эффективно действовать на постоянный магнит 491.
Обмотка 492 электрически подключена к узлу 493 приложения напряжения. Когда узел 493 приложения напряжения прикладывает напряжение к обмотке 492, магнитное поле формируется из обмотки 492 в направлении оси, ортогональном к каждой из центральной оси J3 поворота и центральной оси J4 поворота.
Как показано на фиг. 22, узел 493 приложения напряжения включает в себя узел 493a формирования первого напряжения, который формирует первое напряжение V1 для поворота подвижной пластины 461b вокруг центральной оси J3 поворота, узел 493b формирования второго напряжения, который формирует второе напряжение V2 для поворота подвижной пластины 461b вокруг центральной оси J4 поворота, и узел 493c наложения напряжения, который накладывает первое напряжение V1 на второе напряжение V2, чтобы прикладывать результирующее напряжение к обмотке 492.
Узел 493a формирования первого напряжения формирует первое напряжение V1 (напряжение для вертикального сканирования), изменяющееся периодически для каждого периода T1, который удваивает частоту кадров, как показано на фиг. 23A, аналогично фиг. 9 в варианте 1 осуществления.
Первое напряжение V1 имеет форму сигнала в виде треугольной волны. Таким образом, оптический сканер 45 может эффективно выполнять вертикальное прямое и обратное сканирование (субсканирование) с помощью света. Форма сигнала первого напряжения V1 не ограничена этим. Следует отметить, что частота (1/T1) первого напряжения V1 не ограничивается конкретным образом до тех пор, пока частота является подходящей для вертикального сканирования, но частота предпочтительно колеблется от 15 до 40 Гц (приблизительно 30 Гц).
В варианте осуществления, частота первого напряжения V1 регулируется, чтобы она была частотой, отличающейся от резонансной частоты кручения первой вибрационной системы 46a, сформированной из узла 461a возбуждения и пары первых соединительных узлов 462a и 463a.
С другой стороны, как показано на фиг. 23B, узел 493b формирования второго напряжения формирует второе напряжение V2 (напряжение для горизонтального сканирования), изменяющееся периодически для каждого периода T2, отличающегося от периода T1.
Второе напряжение V2 имеет форму сигнала в виде синусоидальной волны. Таким образом, оптический сканер 45 может эффективно выполнять основное сканирование с помощью света. Форма сигнала второго напряжения V2 не ограничена этим.
Хотя частота второго напряжения V2 не ограничивается конкретным образом до тех пор, пока частота превышает частоту первого напряжения V1 и является подходящей для горизонтального сканирования, частота предпочтительно колеблется от 10 до 40 кГц. Частота второго напряжения V2 задается равной 10-40 кГц таким образом, а частота первого напряжения V1 задается равной приблизительно 30 Гц, как описано выше, так что подвижная пластина 461b может поворачиваться вокруг каждой из центральной оси J3 поворота и центральной оси J4 поворота на частоте, подходящей для прорисовки на экране. Тем не менее, комбинация частоты первого напряжения V1 и частоты второго напряжения V2 и т.п. не ограничивается конкретным образом до тех пор, пока подвижная пластина 461b может поворачиваться вокруг каждой из центральной оси J3 поворота и центральной оси J4 поворота.
В варианте осуществления, частота второго напряжения V2 регулируется, чтобы она была равной резонансной частоте кручения второй вибрационной системы 46b, сформированной из подвижной пластины 461b и пары вторых соединительных узлов 462b и 463b. Это позволяет увеличивать угол поворота подвижной пластины 461b вокруг центральной оси J3 поворота.
Предпочтительно удовлетворять соотношению f2>f1, где f1 [Гц] представляет резонансную частоту первой вибрационной системы 46a, и f2 [Гц] представляет резонансную частоту второй вибрационной системы 46b, и более предпочтительно удовлетворять соотношению f2>=10f1. Это позволяет поворачивать подвижную пластину 461b более плавно вокруг центральной оси J3 поворота на частоте первого напряжения V1 и вокруг центральной оси J4 поворота на частоте второго напряжения V2.
Каждый из узла 493a формирования первого напряжения и узла 493b формирования второго напряжения соединен с устройством 5 управления активацией и возбуждается на основе сигнала из устройства 5 управления активацией. Узел 493c наложения напряжения соединен с каждым из узла 493a формирования первого напряжения и узла 493b формирования второго напряжения.
Узел 493c наложения напряжения включает в себя сумматор 493d для приложения напряжения к обмотке 492. Сумматор 493d принимает первое напряжение V1 из узла 493a формирования первого напряжения, принимает второе напряжение V2 из узла 493b формирования второго напряжения и накладывает эти напряжения и прикладывает результирующее напряжение к обмотке 492.
Оптический сканер 45, выполненный так, как описано выше, возбуждается следующим образом.
Например, первое напряжение V1, как показано на фиг. 23A, и второе напряжение V2, как показано на фиг. 23B, накладываются в узле 493c наложения напряжения, и наложенное напряжение прикладывается к обмотке 492 (наложенное напряжение упоминается также как "напряжение V3").
Затем, напряжение, соответствующее первому напряжению V1 в напряжении V3, вызывает переключение между магнитным полем, притягивающим сторону южного полюса постоянного магнита 491 к обмотке 492 и отводящим сторону северного полюса от обмотки 492, и магнитным полем, отводящим сторону южного полюса постоянного магнита 491 от обмотки 492 и притягивающим сторону северного полюса к обмотке 492. Это поворачивает узел 461a возбуждения вместе с подвижной пластиной 461b вокруг центральной оси J3 поворота на частоте первого напряжения V1 при крутильном деформировании первых соединительных узлов 462a и 463a.
Частота первого напряжения V1 задается так, чтобы она была намного ниже частоты второго напряжения V2, и резонансная частота первой вибрационной системы 46a рассчитывается так, чтобы она была ниже резонансной частоты второй вибрационной системы 46b. По этой причине, первая вибрационная система 46a легко вибрирует в сравнении со второй вибрационной системой 46b, и можно не допускать поворота подвижной пластины 461b вокруг центральной оси J4 поворота посредством первого напряжения V1.
С другой стороны, напряжение, соответствующее второму напряжению V2 в напряжении V3, вызывает переключение между магнитным полем, притягивающим сторону южного полюса постоянного магнита 491 к обмотке 492 и отводящим сторону северного полюса от обмотки 492, и магнитным полем, отводящим сторону южного полюса постоянного магнита 491 от обмотки 492 и притягивающим сторону северного полюса к обмотке 492. Это поворачивает подвижную пластину 461b вокруг центральной оси J4 поворота на частоте второго напряжения V2 при крутильном деформировании вторых соединительных узлов 462b и 463b.
Поскольку частота второго напряжения V2 равна резонансной частоте кручения второй вибрационной системы 46b, подвижная пластина 461b может поворачиваться вокруг центральной оси J4 поворота преимущественно посредством второго напряжения V2. По этой причине, можно не допускать поворота подвижной пластины 461b вместе с узлом 461a возбуждения вокруг центральной оси J3 поворота посредством второго напряжения V2.
Согласно вышеуказанному оптическому сканеру 45, один актуатор может использоваться для того, чтобы выполнять двумерное сканирование с помощью лазерного излучения (света), чтобы экономить пространство в узле 4 оптического сканирования. Помимо этого, например, когда пара оптических сканеров используется, как в варианте 1 осуществления, соотношение относительного положения между оптическими сканерами должно задаваться с высокой точностью, но такая настройка не требуется в варианте осуществления, и тем самым изготовление может упрощаться.
Вариант 5 осуществления, как описано выше, также может достигать преимуществ, аналогичных преимуществам в варианте 1 осуществления, описанном выше.
Хотя устройство формирования изображений согласно изобретению описано на основе вариантов осуществления, как показано, изобретение не ограничено этим, и конфигурация каждого из компонентов может заменяться произвольной конфигурацией, имеющей аналогичную функцию. Другая произвольная составляющая может добавляться к изобретению. Помимо этого, изобретение может быть комбинацией произвольных двух или более конфигураций (признаков) каждого из вариантов осуществления, описанных выше.
Хотя варианты осуществления описаны для случая, в котором поверхность отображения, на которой отображается изображение, задается на поверхности пола, такая поверхность отображения не ограничена этим, и, например, поверхность стены для стены может использоваться, или поверхность потолка для потолка может использоваться.
Проектор и поверхность отображения могут быть размещены на одной поверхности (поверхности стены, поверхности пола или поверхности потолка). Проектор может быть размещен на одной из параллельных поверхностей (например, поверхностях стены или поверхности пола и поверхности потолка), а поверхность отображения может быть размещена на другой.
Хотя вышеуказанные варианты осуществления описаны для примера, в котором мотор используется как источник возбуждения узла поворота модулей и узла поворота сканера, изобретение не ограничено этим, и может использоваться, например, соленоид.
Хотя вышеуказанные варианты осуществления описаны для примера, в котором движущая сила мотора передается в несущий узел с помощью пары шестерен в узле поворота модулей, способ передачи движущей силы не ограничен этим, и, например, можно использовать такой способ, как ременной привод, или способ, в котором ось мотора непосредственно присоединена к несущему узлу.
Узел изменения положения прорисовки также может быть реализован посредством предоставления оптического компонента, такого как поворотное зеркало и призма на оптическом пути между оптическим сканером 41 и оптическим сканером 42.
Узел изменения положения прорисовки также может быть реализован посредством изменения центрального положения амплитуды при повороте подвижных пластин оптических сканеров 41 и 42. В этом случае, например, другое напряжение смещения может быть избирательно наложено на сигнал возбуждения.
Хотя пара оптических сканеров используется в качестве узла оптического сканирования в варианте 1 осуществления, описанном выше, изобретение не ограничено этим, и могут использоваться, например, оптический сканер и гальваническое зеркало. В этом случае гальваническое зеркало предпочтительно используется для вертикального сканирования.
Хотя варианты осуществления описаны для случая, в котором устройство формирования изображений включает в себя один проектор, изобретение не ограничено этим, и число проекторов, включенных в устройство формирования изображений, может составлять два или более.
Хотя первое направление задается равным "горизонтальному направлению", и второе направление задается равным "вертикальному направлению" в варианте осуществления, изобретение не ограничено этим, и, например, первое направление задается равным "вертикальному направлению", а второе направление задается равным "горизонтальному направлению".
Хотя три цветоизбирающих зеркала используются для того, чтобы комбинировать лазерное излучение красного цвета, лазерное излучение зеленого цвета и лазерное излучение синего цвета, чтобы применять одно лазерное излучение (свет) в вариантах осуществления, описанных выше, комбинация может выполняться посредством использования дихроичной призмы и т.п.
Хотя вышеописанные варианты осуществления описаны для конфигурации, в которой модуль 3 источника света имеет источник лазерного излучения, который испускает лазер красного цвета, источник лазерного излучения, который испускает лазер синего цвета, и источник лазерного излучения, который испускает лазер зеленого цвета, изобретение не ограничено этим. Например, модуль 3 источника света может иметь источник лазерного излучения, который испускает лазер красного цвета, источник лазерного излучения, который испускает лазер синего цвета, источник лазерного излучения, который испускает лазер ультрафиолетового излучения. В этом случае экран включает в себя люминесцентный материал, который формирует зеленую флуоресценцию в ответ на применение ультрафиолетового лазера. Это позволяет отображать изображения в насыщенном цвете на поверхности отображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИДЕОПРОЕКТОР | 2012 |
|
RU2503050C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ДЕФЕКТОВ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН БОЛЬШОЙ ПЛОЩАДИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013820C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНЫХ ПОЛНОЦВЕТНЫХ ИЗОБРАЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2219588C1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО И СПОСОБ ПОЗИЦИОНИРОВАНИЯ СКАНИРУЮЩЕГО УСТРОЙСТВА | 2013 |
|
RU2649958C2 |
| ОБЪЕМНЫЙ ДИСПЛЕЙ И СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2526901C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ, ОПТИЧЕСКИЙ СКАНЕР И УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2012 |
|
RU2566738C2 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЦВЕТА ПОВЕРХНОСТИ И ИЗМЕРИТЕЛЬ ЦВЕТА ПОВЕРХНОСТИ | 2004 |
|
RU2288453C2 |
| СТЕРЕОСКОПИЧЕСКАЯ СИСТЕМА ФОРМИРОВАНИЯ И ПРЕДСТАВЛЕНИЯ ИЗОБРАЖЕНИЙ | 2009 |
|
RU2483469C2 |
| УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ (ВАРИАНТЫ) | 2000 |
|
RU2226291C2 |



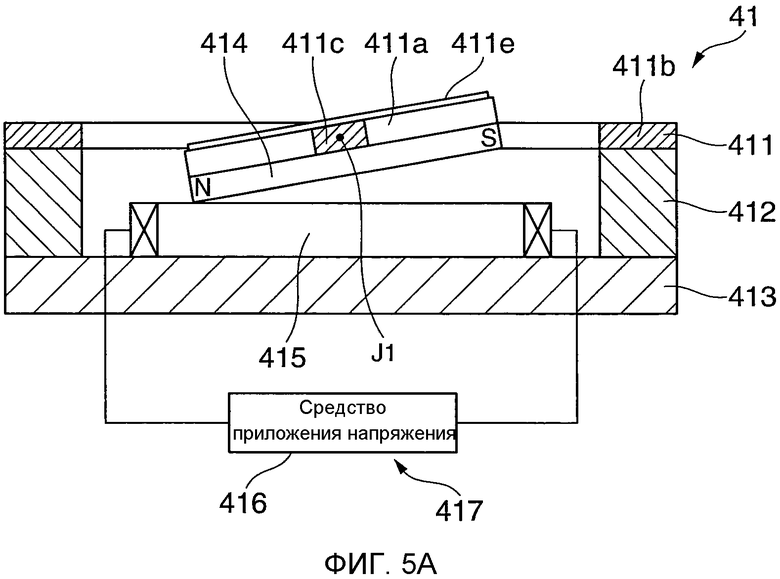
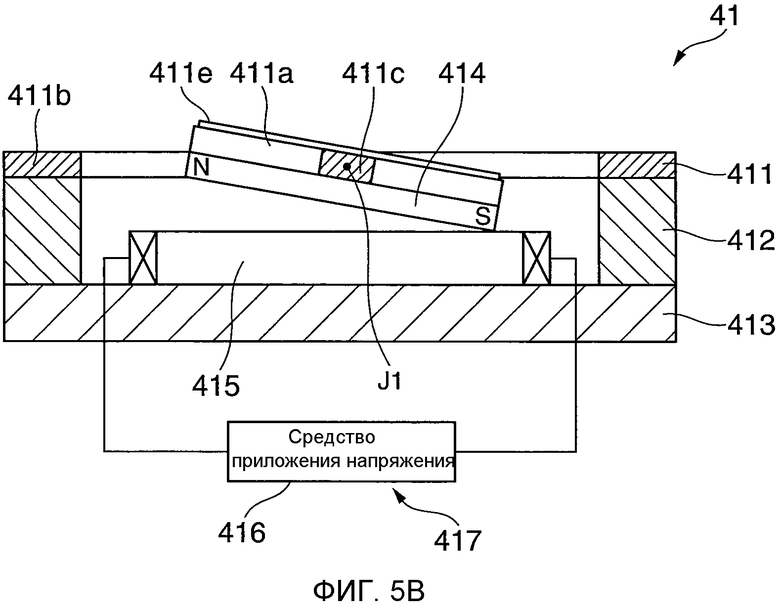



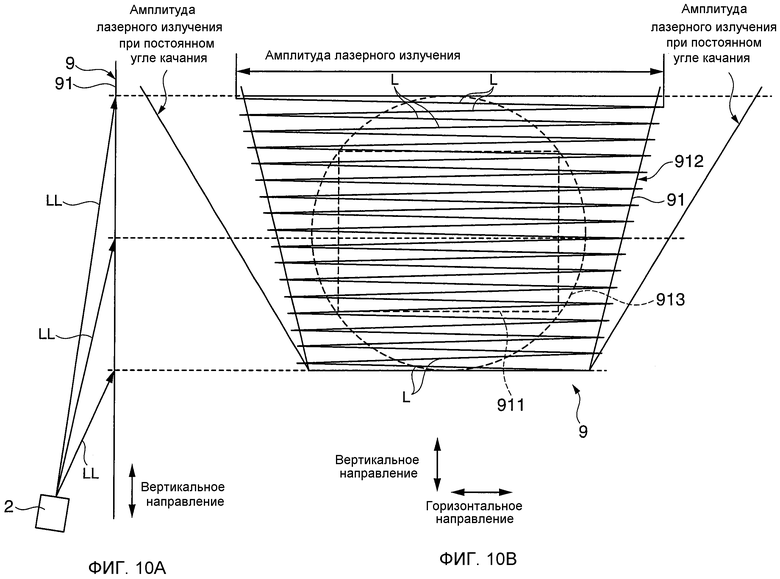
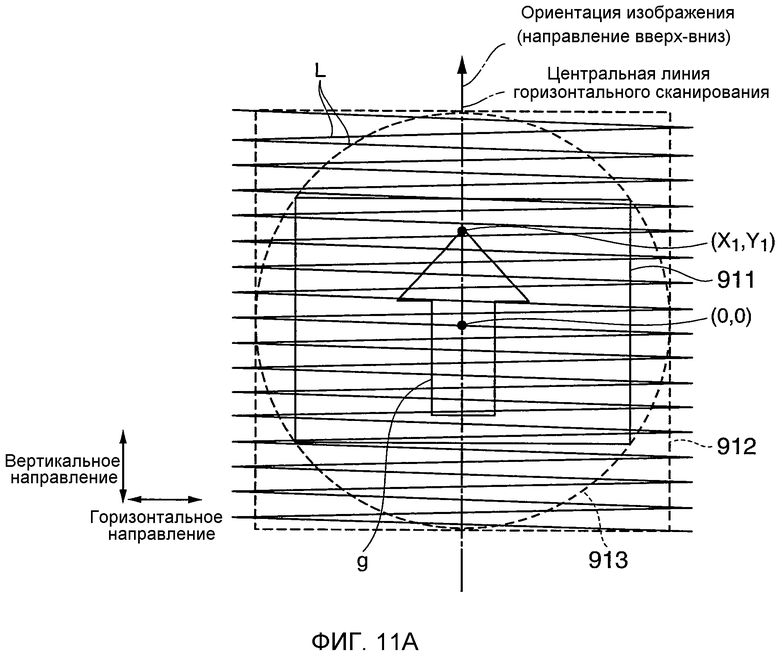
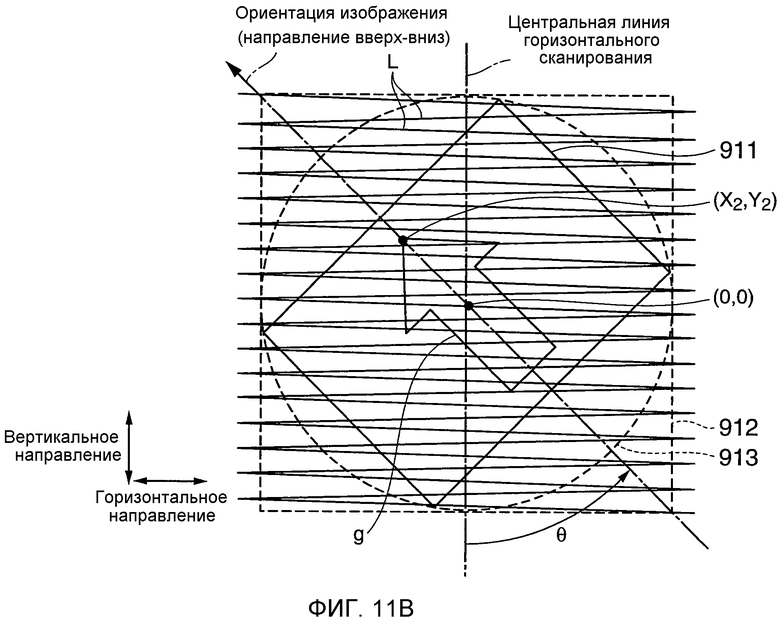
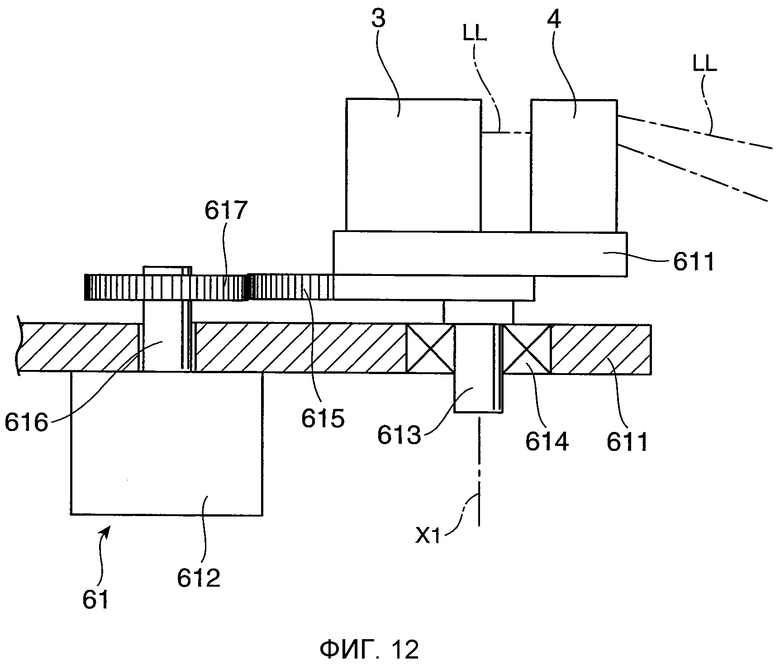
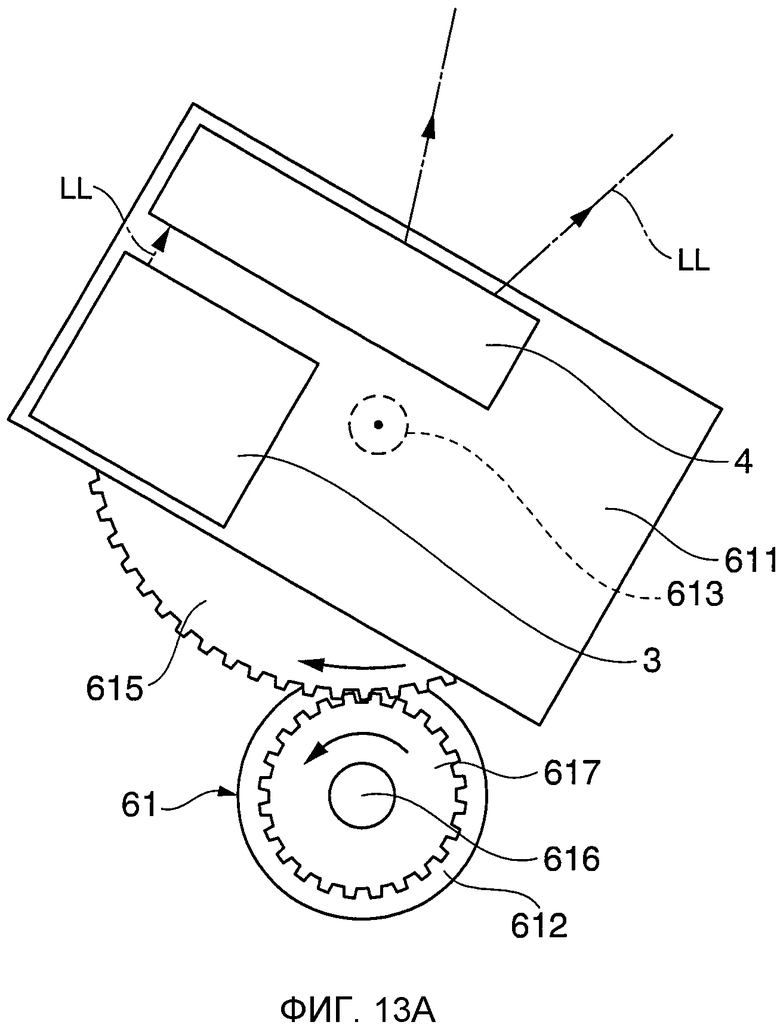





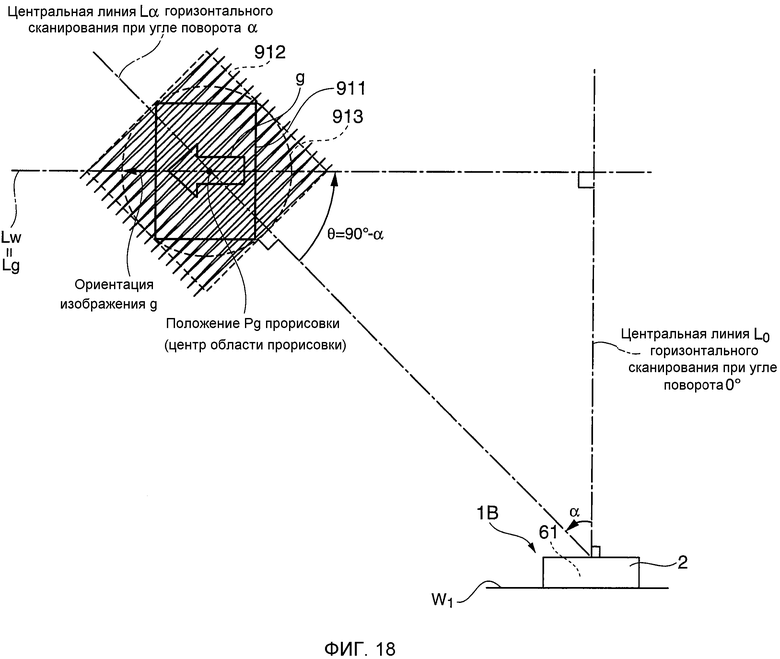
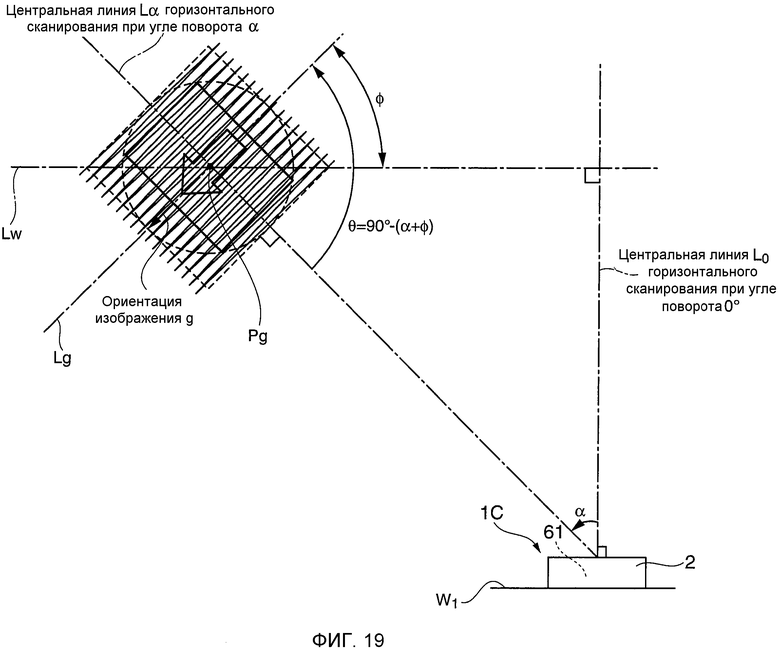

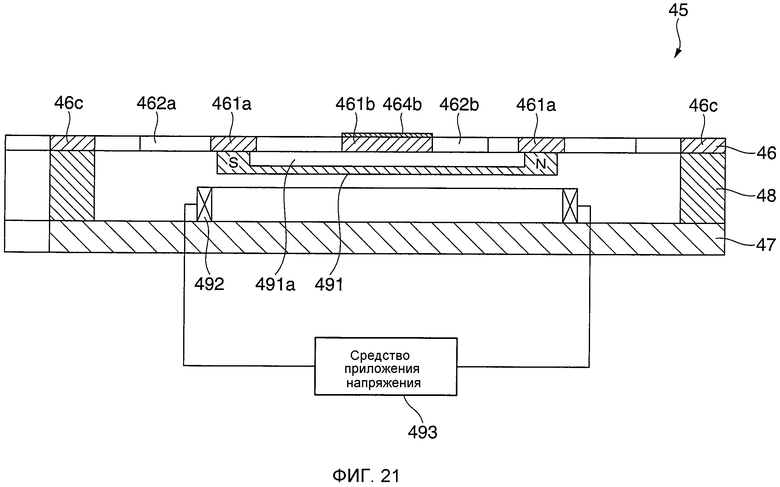
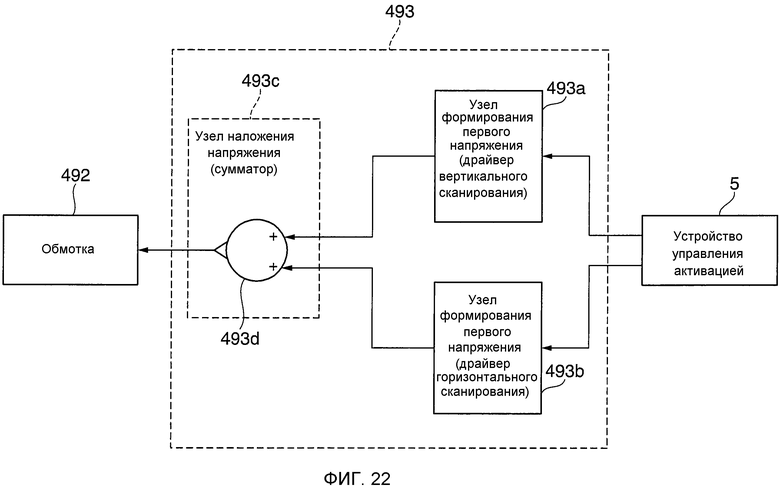
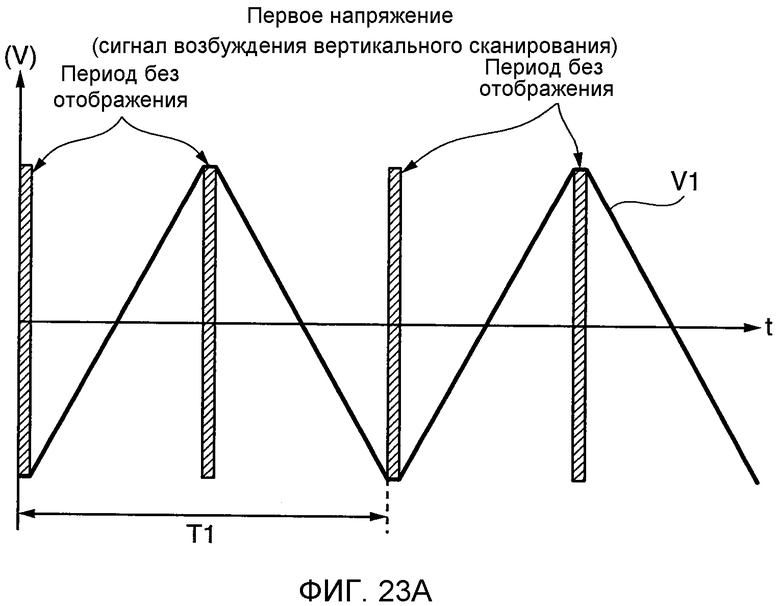

Устройство формирования изображений содержит светоизлучающий узел, испускающий свет на поверхность отображения, обеспеченную на основании, узел оптического сканирования, сканирующий поверхность отображения, узел изменения, вращающий изображение, сформированное на поверхности отображения, вокруг оси вращения, расположенную около центра, узел изменения положения прорисовки, изменяющий положение изображения, узел считывания, считывающий направление перемещения человека, и узел управления, управляющий возбуждением узла изменения положения прорисовки на основе результата считывания узла считывания. Узел управления управляет возбуждением узла изменения положения прорисовки так, что изображение остается расположенным впереди по направлению перемещения человека. Технический результат - улучшение распознавания изображения за счет задания ориентации изображения, при которой человек может легко его просматривать. 8 з.п. ф-лы, 23 ил.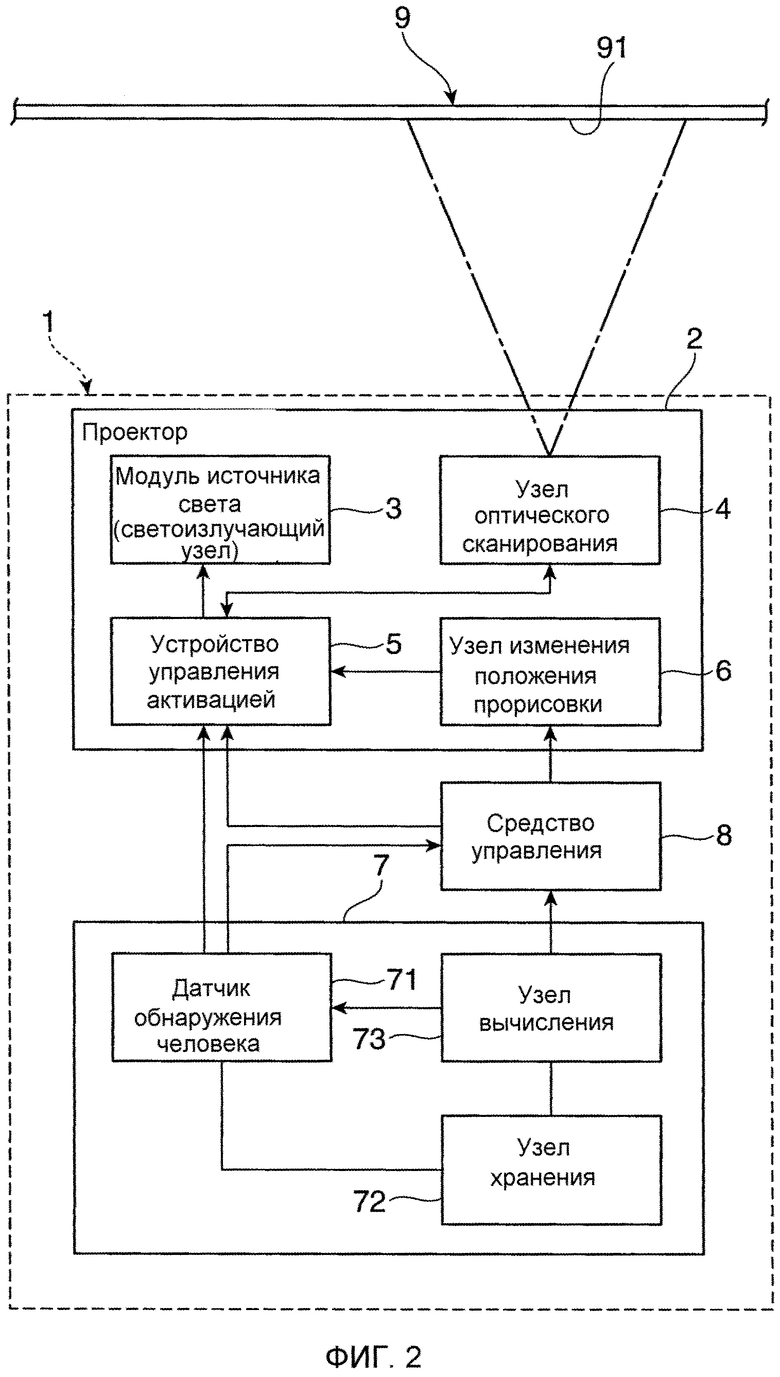
1. Устройство формирования изображений, содержащее:
светоизлучающий узел, испускающий свет на поверхность отображения, обеспеченную на основании;
узел оптического сканирования, сканирующий поверхность отображения с помощью света, испускаемого из светоизлучающего узла;
узел изменения, вращающий изображение, сформированное на поверхности отображения, посредством сканирования с помощью света посредством использования положения около центра в качестве оси вращения, чтобы изменять ориентацию изображения,
узел изменения положения прорисовки, изменяющий положение изображения;
узел считывания, считывающий направление перемещения человека, когда человек присутствует в пределах области считывания; и
узел управления, управляющий возбуждением узла изменения положения прорисовки на основе результата считывания узла считывания, при этом
когда узел изменения изменяет ориентацию изображения, отображаемого на поверхности отображения на основании, фиксированной относительно ориентации человека, и при этом
когда человек перемещается в пределах области считывания, узел управления управляет возбуждением узла изменения положения прорисовки так, что положение изображения, отображаемого на поверхности отображения на основании, изменяется, чтобы оставаться расположенным впереди по направлению перемещения человека.
2. Устройство формирования изображений по п. 1, в котором узел изменения изменяет ориентацию изображения на основе состояния активации узла изменения положения прорисовки.
3. Устройство формирования изображений по п. 2, в котором узел изменения положения прорисовки имеет механизм поворота модулей, поворачивающий светоизлучающий узел и узел оптического сканирования, и
при этом узел изменения изменяет ориентацию изображения на основе угла поворота светоизлучающего узла и узла оптического сканирования с помощью механизма поворота модулей.
4. Устройство формирования изображений по п. 2, в котором механизм поворота модулей поворачивает светоизлучающий узел и узел оптического сканирования вокруг осевой линии, ортогональной к поверхности отображения.
5. Устройство формирования изображений по п. 2, в котором узел изменения изменяет ориентацию изображения на основе состояния активации узла изменения положения прорисовки и результата считывания узла считывания.
6. Устройство формирования изображений по п. 1, в котором узел изменения имеет функцию выполнения обработки вращения видеоданных.
7. Устройство формирования изображений по п. 1, в котором узел изменения имеет узел хранения видеоданных, сохраняющий видеоданные, узел вычисления видеоданных, имеющий функцию выполнения обработки вращения видеоданных, сохраненных в узле хранения видеоданных, и узел модуляции источника света, возбуждающий светоизлучающий узел на основе результата вычисления узла вычисления видеоданных.
8. Устройство формирования изображений по п. 1, в котором узел оптического сканирования включает в себя оптический сканер, предоставленный посредством подвижной пластины, включающей в себя светоотражательный узел, отражающий свет, испускаемый из светоизлучающего узла, причем подвижная пластина является поворотной вокруг одной оси или двух осей, ортогональных друг другу, при этом оптический сканер выполняет сканирование с помощью света, отражаемого посредством светоотражательного узла, посредством поворота.
9. Устройство формирования изображений по п. 1, в котором светоизлучающий узел испускает лазерное излучение.
| US 7901084 B2, 08.03.2011 | |||
| US 2008062123 A1, 13.08.2008 | |||
| RU 2000109685 A, 20.04.2002 | |||
| Автоматическая муфта н.и.бондаря | 1979 |
|
SU855282A1 |

