16
со со
со
00 4;
Изобретение относится к электротехнике, а именно к тиристорным электроприводам постоянного тока с двухзонным регулированием скорости.
Цель изобретения - исключение автоколебаний при спуске груза.
На фиг. 1 изображена функциональная схема устройства, реализующего способ; на фиг. 2 - функциональная схема блока задания токаJ на фиг, 3 и 4 - осциллограммы переходного процесса при управлении известным и предлагаемым электроприводами.
16 и индикатора .18 уровня подключены соответственно к первому, второму и третьему входам логического элемента И 19, выход которого соединен управ- ляклцими входами управляемого переключателя 13 и блока 12 управления форсировкой.
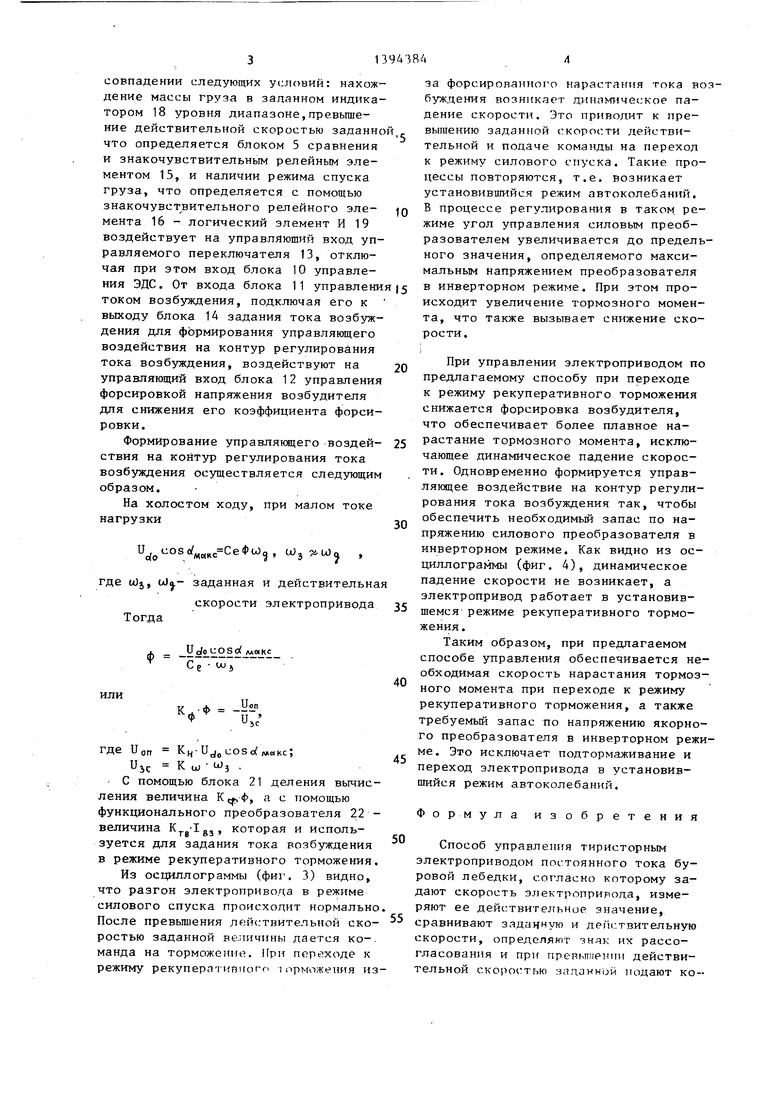
Блок 14 задания тока возбуждения (фиг. 2) состоит из источника 20 опорного напряжения, блока 21 деления, вход делимого которого соединен с выходом источника 20 опорного напряжения, а вход делителя - с выхо
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1984 |
|
SU1206942A2 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Электропривод постоянного тока буровой лебедки | 1988 |
|
SU1577055A1 |
| Реверсивный тиристорный электропривод постоянного тока | 1984 |
|
SU1328913A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1422351A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1993 |
|
RU2076449C1 |
| Способ управления электроприводом постоянного тока | 1980 |
|
SU970614A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РЕКУПЕРАТИВНОГО ТОРМОЗА ЭЛЕКТРОВОЗА ПОСТОЯННОГО ТОКА | 2012 |
|
RU2514961C1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах с двухзонным регули/рованием. Целью изобретения является исключение автоколебаний при спуске груза. В устройстве, реализукщем данньш способ, с помощью знакочувст- вительного элемента дополнительно определяют знак рассогласования между заданной и действительной скоростями. Измеряют массу груза с помощью датчика 17 массы. При нахождении массы груза в заданном индикатором 18 уровня диапазоне, превышении действительной скоростью заданной и наличии режима спуска груза логический элемент 19 воздействует на переключатель 13. При этом выход блока 10 управления ЭДС отключается от входа блока 11 и подключается к выходу блока 14 для формирования управляющего воздействия на контур регулирования тока возбуждения. В данном способе управления обеспечивается необходимая скорость нарастания тормозного момента при переходе к режиму рекуператив ного торможения. 4 ил. с ел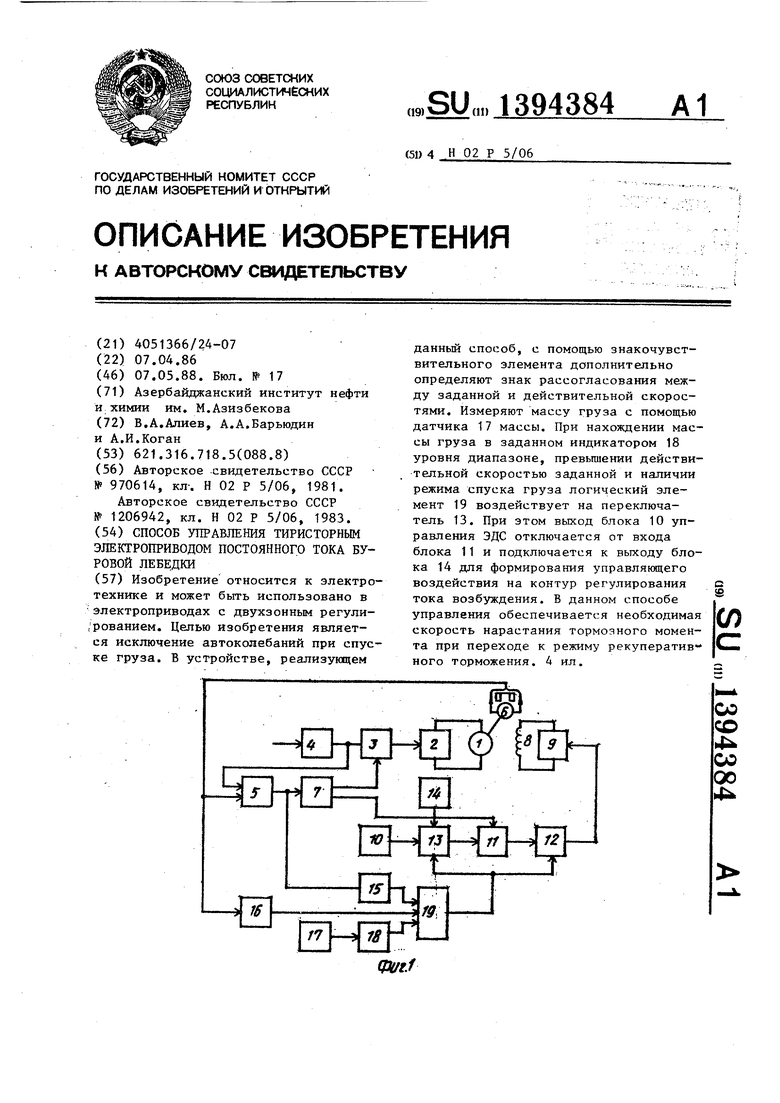
Электропривод содержит электродви- 5 дом задатчика 4 скорости, выход бло20
25
гатель 1, якорная цепь которого подключена к нереверсивному тиристорно- му преобразователю 2, управляемому блоком 3 управления, к входу которого подключен задатчик 4 скорости, выход которого соединен также с одним из входов блока 5 сравнения, второй вход которого соединен с выходом датчика 6 скорости, а выход блока 5 сравнения соединен с входом блока 7 управления торможением, первый выход которого подключен к управляющему входу блока 3 управления. Обмотка 8 возбуждения электродвигателя питается от реверсивного преобразователя 9, в 30 цепь управления которым.включены блок 10 управления ЭДС, блок 11 управления током возбуждения, управляющий вход которого соединен с вторым выходом блока 7 управления торможением и блок 12 управления форсировкой напряжения возбудителя. Кроме этого, устройство содержит управляющий переключатель 13, блок 14 задания тока возбуждения, первый и второй знакочувствительные релейные элементы 15 и 16, датчик 17 массы, индикатор 18 уровня и логический элемент И 19. При этом первьй вход управляемого переключателя 13 соединен с выходом блока 10 ЭДС, второй вход управляемого переключателя 13 соединен с выходом блока 14 задания тока возбуждения, а выход управляемого переключателя 13 соединен с входом блока 11 управления током возбуждения, выход блока 5 сравнения связан с входом знакочувствительного релейного элемента 15, выход датчика 6 скорос ти - с входом знакочувствительного релейного элемента 16, а выход датчика 17 массы - с входом индикатора 18 уровня. Выходы знакочув- ствительных релейных элементов 15 и
ка 21 деления соединен с входом функционального преобразователя 22, выход которого является выходом блока задания тока возбуждения.
Способ управления тиристорным электроприводом постоянного тока буровой лебедки состоит в том, что задают скорость электропривода, измеряют ее действительное значение, сравнивают заданную и действительную скорости, определяют знак их рассогласования и при превьшении действительной скорости заданной подают команду на торможение, при этом дополнительно определяют вес груза, выявляют режим спуска груза и при нахождении веса груза в заданном диапазоне в режиме спуска груза одновременно с подачей команды на торможение снижают коэффициент форсировки возбуждения и изменяют задание тока, возбуждения обратно пропорционально заданной скорости.
Электропривод работает следующим образом.
С помощью задатчика 4 скорости задают величину уставки скорости на силовой спуск, измеряют датчиком 6 скорости действительную скорость Д5 вращения электродвигателя 1, сравнивают в блоке 5 сравнения заданную и действительную скорости электропривода и при превьшении действительной скорости заданной величины подают команду на торможение с помощью блока 7 управления торможением. Дополнитель но определяют знак рассогласования между заданной и действительной скоростями электропривода с помощью знакочувствительного элемента 15, знак скорости, соответствукицей спуску груза, с помощью знакочувствительного релейного элемента 16, а также массу груза с помощью датчика 17 массы. При
35
40
SO
55
0
5
0
ка 21 деления соединен с входом функционального преобразователя 22, выход которого является выходом блока задания тока возбуждения.
Способ управления тиристорным электроприводом постоянного тока буровой лебедки состоит в том, что задают скорость электропривода, измеряют ее действительное значение, сравнивают заданную и действительную скорости, определяют знак их рассогласования и при превьшении действительной скорости заданной подают команду на торможение, при этом дополнительно определяют вес груза, выявляют режим спуска груза и при нахождении веса груза в заданном диапазоне в режиме спуска груза одновременно с подачей команды на торможение снижают коэффициент форсировки возбуждения и изменяют задание тока, возбуждения обратно пропорционально заданной скорости.
Электропривод работает следующим образом.
С помощью задатчика 4 скорости задают величину уставки скорости на силовой спуск, измеряют датчиком 6 скорости действительную скорость 5 вращения электродвигателя 1, сравнивают в блоке 5 сравнения заданную и действительную скорости электропривода и при превьшении действительной скорости заданной величины подают команду на торможение с помощью блока 7 управления торможением. Дополнительно определяют знак рассогласования между заданной и действительной скоростями электропривода с помощью знакочувствительного элемента 15, знак скорости, соответствукицей спуску груза, с помощью знакочувствительного релейного элемента 16, а также массу груза с помощью датчика 17 массы. При
5
0
O
5
совпадении следующих условий: нахождение массы груза в заданном индикатором 18 уровня диапазоне,ггревьппе- ние действительной скоростью заданно что определяется блоком 5 сравнения и знакочувствительным релейным элементом 15, и наличии режима спуска груза, что определяется с помощью знакочувствительного релейного эле- мента 16 - логический элемент И 19 воздействует на управлйюший вход управляемого переключателя 13, отключая при этом вход блока 10 управления ЭДС. От входа блока 11 управлени током возбуждения, подключая его к выходу блока 14 задания тока возбуждения для формирования управляющего воздействия на контур регулирования тока возбуждения, воздействуют на управляющий вход блока 12 управления форсировкой напряжения возбудителя для снижения его коэффициента форси- ровки.
Формирование управлякщего воздей- ствия на контур регулирования тока возбуждения осуществляется следующим образом.
На холостом ходу, при малом токе нагрузки
где lOj, .- заданная и действительна
скорости электропривода
Тогда
Ф
- (y микс
к
Ф
. Ф -Hi и
зс
где Uort K(-Uj cosc MciKc;
Ujc К w
do UJ,
С помощью блока 21 деления вычисления величина К Ф, а с помощью функционального преобразователя 22 - величина .,, которая и исполь
зуется для задания тока возбуждения в режиме рекуперативного торможения,
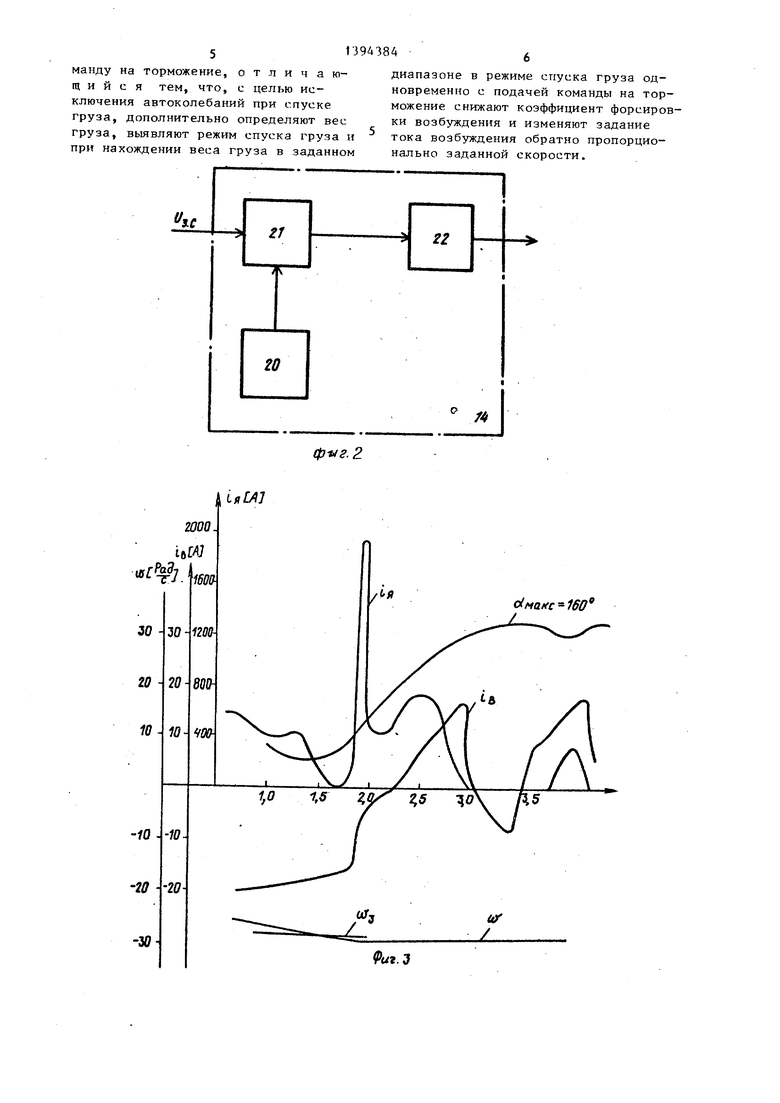
Из осциллограммы (фиг. 3) видно, что разгон электропривода в режиме силового спуска происходит нормально После превышения л йствительной ско- ростью заданной величины дается ко-, манда на торможение. переходе к режиму рекуперативного торможения из, д 5 0
5
0
5
0
5
Q
за форсиронаняого }гарастан11я тока возбуждения возникает динамическое падение скорости. Это приводит к превышению заданной скорости действ1{- тельной и подаче команды на переход к режиму силового спуска. Такие процессы повторяются, т.е. возникает установившийся режим автоколебаний, В процессе регулирования в таком, режиме угол управления силовым преобразователем увеличивается до предельного значения, определяемого максимальным напряжением преобразователя в инверторном режиме. При этом происходит увеличение тормозного момента, что также вызывает снижение скорости.
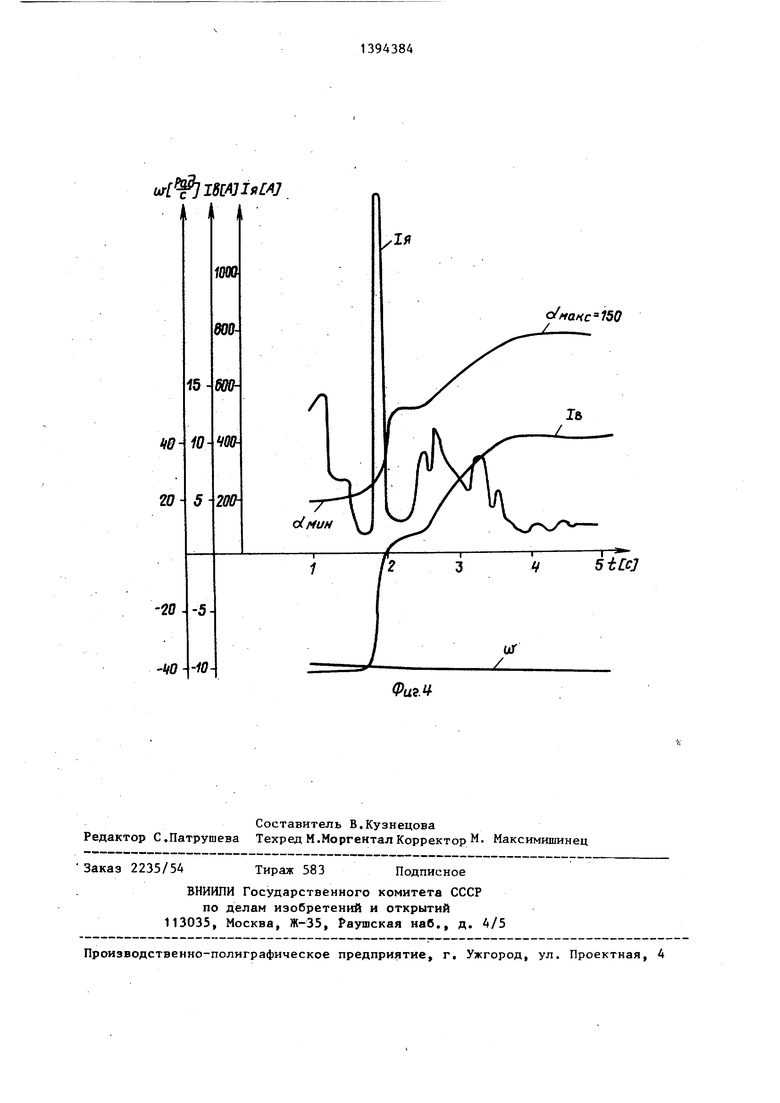
При управлении электроприводом по предлагаемому способу при переходе к режиму рекуперативного торможения снижается форсировка возбудителя, что обеспечивает более плавное нарастание тормозного момента, исключающее динамическое падение скорости. Одновременно формируется управ- лякщее воздействие на контур регулирования тока возбуждения так, чтобы обеспечить необходимьй запас по напряжению силового преобразователя в инверторном режиме. Как видно из ос- циллогра1 1мы (фиг. 4), динамическое падение скорости не возникает, а электропривод работает в установив- щемся режиме рекуперативного торможения.
Таким образом, при предлагаемом способе управления обеспечивается необходимая скорость нарастания тормозного момента при переходе к режиму рекуперативного торможения, а также требуемьш запас по напряжению якорного преобразователя в инверторном режиме. Это исключает подтормаживание и переход электропривода в установив- пшйся режим автоколебаний.
Формула изобретения
Способ управления тиристорным электроприводом постоянного тока буровой лебедки, сог ласно которому задают скорость электропривода, измеряют ее действитетгьное значение, сравнивают заданную и действительную скорости, определяют чнак их рассогласования и при ripenFiiriipHint действительной скоростью заданной подают ко-
манду на торможение, отличающийся тем, что, с целью исключения автоколебаний при спуске груза, дополнительно определяют вес груза, вьивляют режим спуска груза и при нахождении веса груза в заданном
,
S.C
Z1
ф-ыг.2.
UW
.
-20
-30
диапазоне в режиме спуска груза одновременно с подачей команды на торможение снижают коэффициент форсиров- ки возбуждения и изменяют задание тока возбуждения обратно пропорционально заданной скорости.
гг
cffiaifc WO
az.J
ur i8CA iffi: j
Составитель В.Кузнецова Редактор С.Патрушева Техред М.Моргентал Корректор М. Максимишинец
Заказ 2235/54
Тираж 583
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-Э5, Раушская наб., д. 4/5
of макс ISO
S-tCcJ
Подписное
| Способ управления электроприводом постоянного тока | 1980 |
|
SU970614A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1984 |
|
SU1206942A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
