котором произошло исчезновение сигнала обратной связи по скорости, и для локализации аварийной ситуации дифференцированно осуществлять лмбо перевод тиристор- ного преобразователя 2 в инверторный режим, либо его запирание. 1 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный тиристорный электропривод постоянного тока | 1984 |
|
SU1328913A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1984 |
|
SU1206942A2 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1422351A1 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Устройство для определения режима работы электропривода постоянного тока | 1984 |
|
SU1354376A1 |
| Способ управления тиристорным электроприводом | 1982 |
|
SU1078565A2 |
| Двухзоннорегулируемый электропривод с реверсом возбуждения | 1982 |
|
SU1034139A1 |
| Электропривод постоянного тока с потенциальным моментом нагрузки | 1988 |
|
SU1651350A1 |
| Устройство для определения режима работы электропривода постоянного тока с двухзонным регулированием | 1984 |
|
SU1272443A1 |
Изобретение относится к электротехнике и может найти применение в тиристорных электроприводах постоянного тока с реверсом направления вращения. Целью изобретения является повышение надежности работы электропривода за счет увеличения точности определения его режима работы. Устройство содержит два блока 17 и 18 выделения модуля, знакочувствительный релейный элемент 19, фиксатор 20 уровня, логический элемент НЕ 21, логические элементы И-НЕ 22-24, а также управляемый переключатель 14 и управляемые ключи 15 и 16, управляющие режимом работы тиристорного преобразователя 2. Устройство позволяет определять режим, при котором произошло исчезновение сигнала обратной связи по скорости и для локализации аварийной ситуации дифференцированно осуществлять либо перевод тиристорного преобразователя 2 в инверторный режим, либо его запирание. 1 ил.
Изобретение относится к электротехнике, а именно к тиристорным электроприводам постоянного тока с реверсом направления вращения электродвигателя.
Цель изобретения - повышение надежности работы электропривода за счет более точного определения его режима работы.
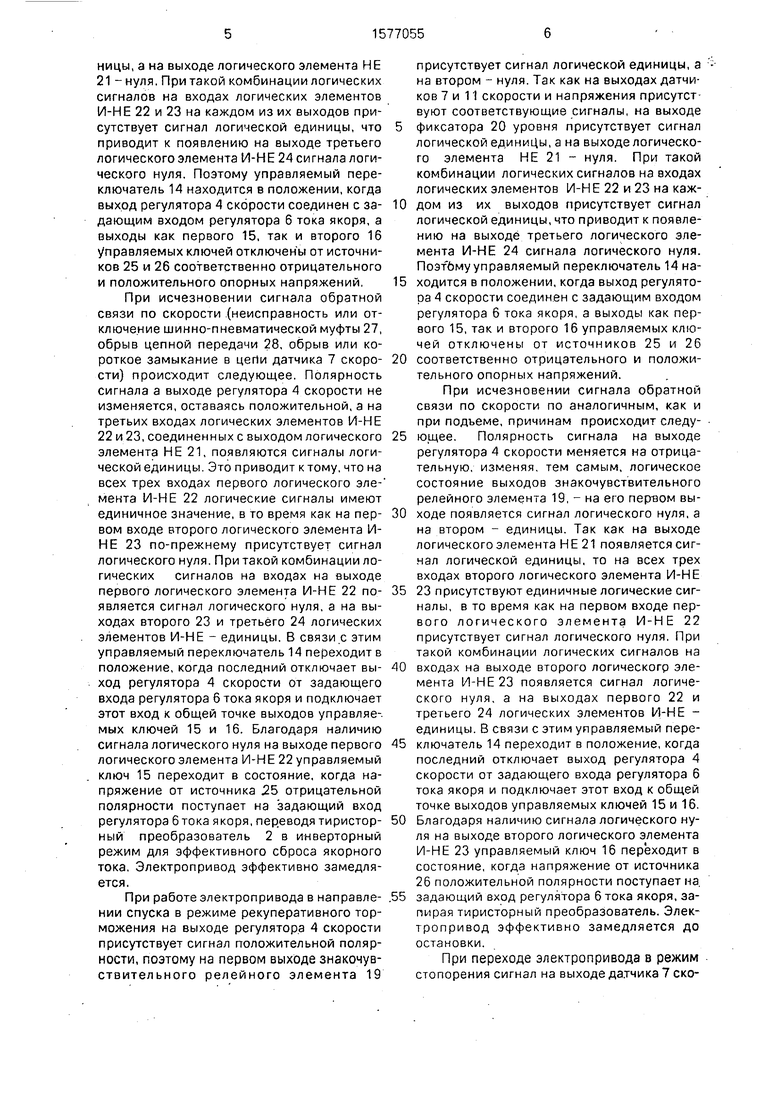
На чертеже изображена функциональная схема злектропривода.
Электропривод постоянного тока буровой лебедки содержит электродвигатель, якорная обмотка 1 которого подключена к тиристорному преобразователю 2, в цепь управления которого включены последовательно соединенные блок 3 задания скорости и регулятор 4 скорости с блоком 5 ограничения и регулятор 6 тока якоря с подключенными к входам соответствующих регуляторов датчиками 7 и 8 скорости и тока, а обмотка 9 возбуждения электродвигателя подключена к выходу системы 10 регулирования возбуждения, входы которой соединены с выходами датчика 8 тока якоря, датчика 11 напряжения на якоре и датчика 12 тока возбуждения, при этом датчик 7 скорости соединен с барабаном 13- лебедки. Электропривод также содержит управляемый переключатель 14, два управляемых ключа 15 и 16, блоки 17 и 18 выделения модуля, знакочувствительный релейный элемент 19, фиксатор 20 уровня, логический элемент НЕ 21, логические элементы И-НЕ 22-2.4 и разнополярные источники 25 и 26 опорного напряжения, при этом выход регулятора 4 скорости соединен с входом знако- чувствительного релейного элемента 19, первый выход которого подключен к первому входу первого логического элемента И- НЕ 22, а второй выход - к первому входу второго логического элемента И-НЕ 23, выход датчика 11 напряжения на якоре через последовательно включенные первый блок 17 выделения модуля и фиксатор 20 уровня связан с вторыми входами логических элементов И-НЕ и 23, выход датчика 7 ско- pocfn через последовательно включенные блок 18 выделения модуля и логический элемент НЕ 21 связан с третьими входами логических элементов И-НЕ 22 и 23, выход первого из которых соединен с первым входом третьего логического элемента И-НЕ 24 и управляющим входом п ервого управляемого ключа 15, включенного между источником 25 отрицательного опорного напряжения и первым входом управляемого переключателя 14, выход второго логического элемента И-НЕ 23 соединен с вторым входом третьего логического элемента И-НЕ 24 и с управляющим входом управляемого Ключа 16, включенного между источником 26 положительного опорного напряжения и
первым входом управляемого переключателя 14, второй вход которого связан с выходом регулятора 4 скорости, выход - с задающим входом регулятора 6 тока якоря, а выход третьего логического элемента
И-НЕ соединен с управляющим входом управляемого переключателя 14, Барабан 13 лебедки соединен с электродвигателем посредством шинно-пневматической муфты 27, а с датчиком 7 скорости - посредством
цепной передачи 28,
Электропривод работает следующим образом.
В режиме стоянки электропривода сигналы на выходах регулятора 4 скорости, датчика 7 скорости и датчика 11 напряжения равны нулю/ При такой комбинации аналоговых сигналов на выходах логических элементов И-НЕ 22 и 23 присутствуют сигналы логической единицы, а на выходе логического элемента И-НЕ 24 - сигнал логического нуля. Благодаря этому управляемый переключатель 14 находится в таком положении, когда выход регулятора 4 скорости соединен с задающим входом регулятора 6 тока
якоря, а выходы как первого 15, так и второго 16 управляемых ключей отключены от источников 25 и 26 соответственно отрицательного и положительного опорных напряжений: Электропривод подготовлен котработке сигнала блока 3 задания скорости.
При работе электропривода в двигательном режиме в направлении подъема на выходе регулятора 4 скорости присутствует
сигнал положительной полярности, поэтому на первом выходе знакочувствительного релейного элемента 19 присутствует сигнал логической единицы, а на втором - нуля. Так как на выходах датчиков скорости 7
и напряжения 11 присутствуют соответствующие сигналы, на выходе фиксатора 20 уровня присутствует сигнал логической единицы, а на выходе логического элемента НЕ
21- нуля. При такой комбинации логических сигналов на входах логических элементов И-НЕ 22 и 23 на каждом из их выходов присутствует сигнал логической единицы, что приводит к появлению на выходе третьего логического элемента И-НЕ 24 сигнала логического нуля. Поэтому управляемый переключатель 14 находится в положении, когда выход регулятора 4 скорости соединен с задающим входом регулятора 6 тока якоря, а выходы как первого 15, так и второго 16 Управляемых ключей отключены от источников 25 и 26 соответственно отрицательного и положительного опорных напряжений.
При исчезновении сигнала обратной связи по скорости (неисправность или отключение шинно-пневматической муфты 27, обрыв цепной передачи 28, обрыв или короткое замыкание в цепи датчика 7 скорости) происходит следующее. Полярность сигнала а выходе регулятора 4 скорости не изменяется, оставаясь положительной, а на третьих входах логических элементов И-НЕ
22и 23, соединенных с выходом логического элемента НЕ 21, появляются сигналы логической единицы. Это приводит к тому, что на всех трех входах первого логического эле- мента И-НЕ 22 логические сигналы имеют единичное значение, в то время как на первом входе второго логического элемента И- НЕ 23 по-прежнему присутствует сигнал логического нуля. При такой комбинации логических сигналов на входах на выходе первого логического элемента И-НЕ 22 появляется сигнал логического нуля, а на выходах второго 23 и третьего 24 логических элементов И-НЕ - единицы. В связи с этим управляемый переключатель 14 переходит в положение, когда последний отключает выход регулятора 4 скорости от задающего входа регулятора 6 тока якоря и подключает этот вход к общей точке выходов управляв-, мых ключей 15 и 16. Благодаря наличию сигнала логического нуля на выходе первого логического элемента И-НЕ 22 управляемый ключ 15 переходит в состояние, когда напряжение от источника J25 отрицательной полярности поступает на задающий вход регулятора 6тока якоря, переводя тиристор- ный преобразователь 2 в инверторный режим для эффективного сброса якорного тока. Электропривод эффективно замедляется.
При работе электропривода в направлении спуска в режиме рекуперативного торможения на выходе регулятора 4 скорости присутствует сигнал положительной полярности, поэтому на первом выходе знакочув- ствительного релейного элемента 19
присутствует сигнал логической единицы, а на втором - нуля. Так как на выходах датчиков 7 и 11 скорости и напряжения присутствуют соответствующие сигналы, на выходе 5 фиксатора 20 уровня присутствует сигнал логической единицы, а на выходе логического элемента НЕ 21 - нуля. При такой комбинации логических сигналов на входах логических элементов И-НЕ 22 и 23 на каж0 дом из их выходов присутствует сигнал логической единицы, что приводит к появлению на выходе третьего логического элемента И-НЕ 24 сигнала логического нуля. Поэтбмууправляемый переключатель 14 на5 ходится в положении, когда выход регулятора 4 скорости соединен с задающим входом регулятора 6 тока якоря, а выходы как первого 15, так и второго 16 управляемых ключей отключены от источников 25 и 26
0 соответственно отрицательного и положительного опорных напряжений.
При исчезновении сигнала обратной связи по скорости по аналогичным, как и при подъеме, причинам происходит следу5 ющее. Полярность сигнала на выходе регулятора 4 скорости меняется на отрицательную, изменяя, тем самым, логическое состояние выходов знакочувствительного релейного элемента 19, - на его первом вы0 ходе появляется сигнал логического нуля, а на втором - единицы. Так как на выходе логического элемента НЕ 21 появляется сигнал логической единицы, то на всех трех входах второго логического элемента И-НЕ
5 23 присутствуют единичные логические сигналы, в то время как на первом входе первого логического элемента И-НЕ 22 присутствует сигнал логического нуля. При такой комбинации логических сигналов на
0 входах на выходе второго логическогр элемента И-НЕ 23 появляется сигнал логического нуля, а на выходах первого 22 и третьего 24 логических элементов И-НЕ - единицы. В связи с этим управляемый пере5 ключатель 14 переходит в положение, когда последний отключает выход регулятора 4 скорости от задающего входа регулятора 6 тока якоря и подключает этот вход к общей точке выходов управляемых ключей 15 и 16.
0 Благодаря наличию сигнала логического нуля на выходе второго логического элемента И-НЕ 23 управляемый ключ 16 переходит в состояние, когда напряжение от источника 26 положительной полярности поступает на
5 задающий вход регулятора 6 тока якоря, запирая тиристорный преобразователь. Электропривод эффективно замедляется до остановки.
При переходе электропривода в режим стопорения сигнал на выходе датчика 7 скорости стремится к нулю даже при отсутствии неисправностей в цепи обратной связи по скорости. В то же время сигнал на выходе
.датчика 11 напряжения настолько мал, что на выходе фиксатора 20 уровня появляется сигнал логического нуля. Поэтому на выходе как первого 22, так и второго 23 логических элементов И-НЕ присутствуют сигналы логической единицы, а на выходе третьего логического элемента И-НЕ 24 - нуля. Так как такой режим не является аварийным, управляемый переключатель 14 м управляемые ключи 15 и 16 остаются в исходном состоянии, когда выход регулятора 4 скорости соединен с задающим входом регулятора б тока якоря.
Таким образом, при исчезновении сигнала обратной связи по скорости определяется режим, в котором это произошло (двигательный или рекуперативное торможение) и для локализации аварийной ситуации дифференцированно осуществляется либо перевод тиристорного преобразователя в инверторны й режим, либо его запирание.
Предлагаемая схема электропривода по сравнению с известными имеет более высокую надежность, так как в результате улучшения разрешающей способности ло гической части устройства оказывается возможным не только фиксировать факт исчезновения сигнала обратной связи по скорости, но и режим (двигательный или тормозной), в котором это произошло, и в зависимости от режима предотвращать возникновение аварийной ситуации дифферен- цированно. Кроме этого, улучшение разрешающей способности устройства позволяет исключить ложные отключения электропривода в режимах, не являющихся аварийными.
Формула изобретения Электропривод постоянного тока буровой лебедки, содержащий электродвигатель, якорная обмотка которого подключена к тиристорному преобразователю, в цепь управления которого включены последовательно соединенные блок задания скорости и регулятор скорости с блоком ограничения и регулятор тока якоря с подключенными к входам соответствующих регуляторов датчиками скорости и тока якоря, а обмотка возбуждения электродвигателя подключена к выходу системы регулирования возбуждения, входы которой соединены с выходами
датчиков тока якоря, напряжения на якоре и тока возбуждения, при этом датчик скорости соединен с барабаном лебедки, от л и ч- а ю щ и и с я тем, что, с целью повышения надежности работы электропривода за счет
более точного определения его режима работы, в него дополнительно введены управляемый переключатель, два управляемых ключа, два блока выделения модуля, знако- чувствительный релейный элемент, фиксатор уровня, логический элемент НЕ, три логических элемента И-НЕ и два разнопо- лярных источника опорного напряжения, при этом выход регулятора скорости соединен с входом знакочувствительного релейного элемента, первый выход которого подключен к первому входу первого логического элемента И-НЕ, а ВТОРОЙ выход -jc первому входу второго логического элемента И-НЕ, выход датчика напряжения на якоре
через последовательно включенные первый блок выделения модуля и фиксатор уровня связан с вторыми входами упомянутых логических элементов И-НЕ, выход датчика скорости через последовательно включенные
второй блок выделения модуля и логический элемент НЕ связан с третьими входами упомянутых логических элементов И-НЕ, выход первого из которых соединен с первым входом третьего логического элемента И-НЕ и
управляющим входом первого управляемого ключа, включенного между источником отрицательного опорного напряжения и первым входом управляемого переключателя, выход второго логического элемента ИНЕ соединен с вторым входом третьего логического элемента И-НЕ и с управляющим входом второго управляемого ключа, включенного между источником положительного опорного напряжения и первым
входом управляемого переключателя, второй вход которого связан с выходом регуля- тора скорости, выход - с задающим входом регулятора тока якоря, а выход третьего логического элемента И-НЕ соединен с
управляющим входом управляемого переключателя.
| Электропривод с двухзонным регулированием частоты вращения | 1983 |
|
SU1069110A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Унифицированные системы тиристор- ного электропривода постоянного тока наземных буровых установок: Обзорная информация.- М,: Информэлектро, 1985, с | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
