Изобретение относится к робототехнике и может быть использовано в кон струк:циях адаптивных роботов.
Цель изобретения - повышение надежности работы захвата и его быстродействие.
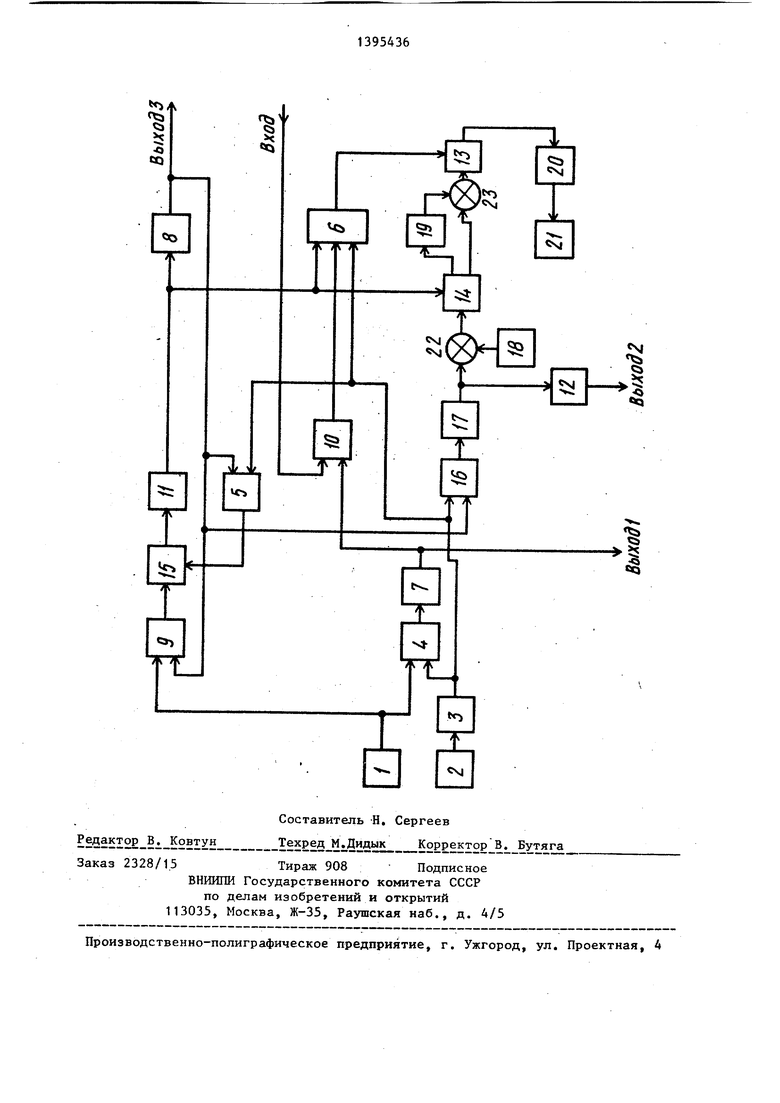
На чертеже приведена функциональная схема устройства для адаптации робота к весу захватываемых деталей. . Устройство содержит тактильный Датчик 1, датчик проскальзывания 2, усилитель 3, первый 4,, второй 5 и третий 6 элементы ИЛИ первый 7 и иторой 8 блоки задержки, первый 9 второй 10 RS-триггеры, первый 11 второй 12 пороговые элементы, пер- иый 13 и второй 14 ключ, интегратор 5, счетчик 16, цифроаналоговый пре- с бразователь 17, источник 18 опорно- ifo напряжения, делитель напряжения 19, усилитель мощности 20, привод 1 губок захвата, а также первый 2 и второй 23 сумматоры, i Выход тактильного датчика 1 под- глючен к первым входам первого элемента ИЛИ 4 и первого RS-триггера 9, которого соединен с первым входом интегратора 15,
: Выход датчика проскальзывания 2 ерез усилитель 3 подключен к второ- ijiy входу первого элемента ИЛИ 4, тре ij-beMy входу третьего элемента ИЛИ 6,; фторому входу второго элемента ИЛИ 5 и первому входу счетчика 16, выход ijtoToporo через цифроаиалоговьм пре- фбразователь 17 соединен с первым входом первого сумматора 22, подключенного вторым входом к источнику 18 iJjnopHoro напряжения. Выход первого флемента ИЛИ 4 через первьш блок за- Держки 7 соединен с первым выходом устройства и вторым входом второго КЗ-триггера 10, пе;рвый вход которого подключен к входу устройства, а выход - к первому входу третьего элемента Unii 6. Второй выход устройства через второй пороговый элемент 12 соединен с выходом цифроаналогового преобразователя 17.
Выход интегратора 15, второй вход которого подключен к выходу второго элемента ИЛИ 5, соединен через первый пороговьй элемент 11 со входом второго блока задержки 8, вторым входом третьего элемента ИЛИ 6 и управляющим входом второго ключа 14. Третий выход устройства соединен с выходом второго блока задерж
0
5
0
5
0
5
0
5
ки 8, вторым входом первого RS-триггера 9 и первым входом второго элемента ИЛИ 5. Второй сигнальньш выход второго ключа 14, подключенного сигнальным входом к выходу первого сумматора 22, и второй вход второго сумматора 23 соединены непосредственно, а первый выход ключа 14 и первьй вход сумматора 23 - через делитель напряжения 19.
Выход второго сумматора 23 через последовательно соединенные первьй ключ 13, управляющий вход которого соединен с выходом третьего элемента ИЖ 6, и усилитель мощности 20 подключен к приводу 21 губок.
Устройство работает следующим образом.
В исходном состоянии (перед захватыванием детали) губки захвата разведены, на выходах тактильного датчика 1 и датчика проскальзывания: 2 установлены сигналы нулевого уровня, первьй 9, второй 10 RS-триггеры и счетчик 16 находятся в нулевом состоянии ,,а следовательно, на выходе цифроаналогового преобразователя 17 напряжение равно нулю. При этом на- пряжени на выходе первого сумматора соответствует напряжению Uj,n , установленному на выходе источника опорного напряжения. Сигнальньй вход первого ключа 13 отключен от его выхода, а сигнальньй вход второго ключа 14 соединен с его первым сигнальным выходом, подключенным к входу делителя напряжения 19 с коэ.ффициентом деления К. Поскольку выход делителя напряжения 19 связан с первым входом второго сумматора 23, то на выходе последнего установлен сигнал, соответствующий напряжению
и, и,„/к ,
На вход ycTpoficTBa подается импульс, сигнализируюпщй о необходимости вьшолнения и начале операции захватывания. Этот импульс поступает на первьй вход второго RS-триггера 10 и устанавливает его в единичное состояние. Сигнал логической единицы поступает на первьй вход третьего элемента ИЛИ 6, на выходе которого также установится сигнал логической единицы, которьй, будучи подан на управляющий вход первого ключа 13, вызывает его срабатывание, что приводит к прохождению сигнала с выхода второго сумматора 23 на вход усилителя мощности 20, а с последнего - на привод губок захвата 1. Сигнал и„ соответствует созданию приводом 21 губок захвата минимального (начального) сжимающего усилия. Губки захвата под действием привода 21 начинают сближаться. В момент касания детали губками захвата срабатывает тактильньй датчик 1, импульс с выхода которого поступает на первьм вход первого RS-триггера 9 и на первый вход первого элемента ИЛИ 4. Этот импульс вызывает установку первого КЗ- триггера 9 в единичное состояние, т.е. появление на его вькоде сигнала, соответствующего уровню логической единицы, которьй, поступая на первый вход интегратора 15, вызьшает появле- .ние на выходе последнего линейно на- .растающего напряжения. При этом также .формируется сигнал на выходе первого элемента ИЛИ 4, которьй, будучи задержан первым блоком задержки 7, поступает на первьй выход устройства, подавая команду на пробное движение, а также на второй вход второго RS- триггера 10,. и сбрасывает его в нулевое состояние. Нулевой сигнал на выходе последнего вызывает появление логического нуля на выходе третьего элемента 1ШИ 6, а следовательно, сброс первого ключа 13. Усилитель мощности 20 отключается от выхода второго сумматора 23. Робот выполняет пробное движение, т.е. приподнимает захват с зажатой деталью и, если сжимающего усилия недостаточно для удержания детали, то она начинает прсг
О
5
тора 22. Выходной сигнал U, сумматора 22 поступает через второй ключ 14 и делитель 19 на первьй вход второго сумматора 23, на выходе которого устанавливается сигнал U, Up /К. Сигнал на третьем входе третьего элемента ИЛИ 6 вызывает появление логической единицы на выходе последнего, срабатывание первого ключа 13, через которьй напряжение U, соответствующее следующей ступени сжимающего усилия, поступает на усилитель мощности 20, а с него - на привод 21, которьй отрабатывает новое усилие. Сигнал на втором входе первого элемента ИЛИ 4 вызывает появление сигнала на выходе последнего. Этот сигнал, будучи задержан по времени первым блоком задержки 7, что необходимо для того, чтобы привод 21 успел отработать новое сжимающее усилие, поступает на первьй выход устройства и является командой на новое пробное движение.
Указанная последовательность опе- paций будет продолжаться до тех пор, пока сжимающее усилие не станет достаточным для надежной фиксации детали на губках захвата. В этом случае сигнал с датчика проскальзывания 2 при очередном пробном движении не поступит, следовательно, не поступит и сбрасьтающий импульс на второй вход интегратора 15, напряжение на выходе последнего возрастает, пока не достигнет уровня срабатывания первого порогового элемента 11, который при этом подает импульс на второй блок
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для геоэлектроразведки | 1982 |
|
SU1045193A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1705865A1 |
| Устройство измерения уровня радиопомех | 1986 |
|
SU1370622A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ | 2001 |
|
RU2194286C1 |
| РАДИОЛУЧЕВОЙ ДАТЧИК ОХРАНЫ | 1992 |
|
RU2079889C1 |
| РАСХОДОМЕР ТОПЛИВА | 1990 |
|
RU2035699C1 |
| Устройство контроля качества радиотелефонных каналов связи | 1982 |
|
SU1100737A1 |
| Устройство контроля качества радиотелефонных каналов связи | 1986 |
|
SU1332546A2 |
| Устройство для измерения частоты | 1979 |
|
SU813291A1 |
| Тренажер операторов систем управления | 1983 |
|
SU1138821A1 |
Изобретение относится к области робототехники и может бьггь использовано в конструкциях адаптивньк роботов. Целью изобретения является повышение надежности и быстродействия. Для этого устройство содержит тактильный датчик, датчик проскальзывания, усилитель, три элемента ИЛИ, два блока задержки, два RS-триггера, два пороговых элемента, два ключа, интегратор, счетчик, цифроаналоговый преобразователь, источник опорного напряжения, делитель напряжения, усилитель мощности, привод губок захвата, а также два сумматора. Работа устройства основана на регистрации сигналов о проскальзьтании, .поступаю- npix с датчика проскальзьшания во время пробных движений, если сжимающего усилия захвата недостаточно для удержания детали. Эти сигналы в виде им- пульс ов поступают на счетчик и изменяют его состояние, вследствие чего ступенчато растет напряжение на выходе цифроангшогового преобразователя, которое через делитель напряжения поступает на усилитель мощности, нагрузкой которого является привод губок захвата. Сжимакядее усилие губок захвата возрастает. Когда оно станет достаточным для надежной фиксации детали5 напряжение с выхода цифро- аналогового преобразователя поступит на усилитель мощности, минуя делитель, напряжения, вследствие чего окончательное усилие захвата увеличится, что исключит выпадение детали из пальцев захвата при манипулировании. 1 ил. (Л со со ел 00 О5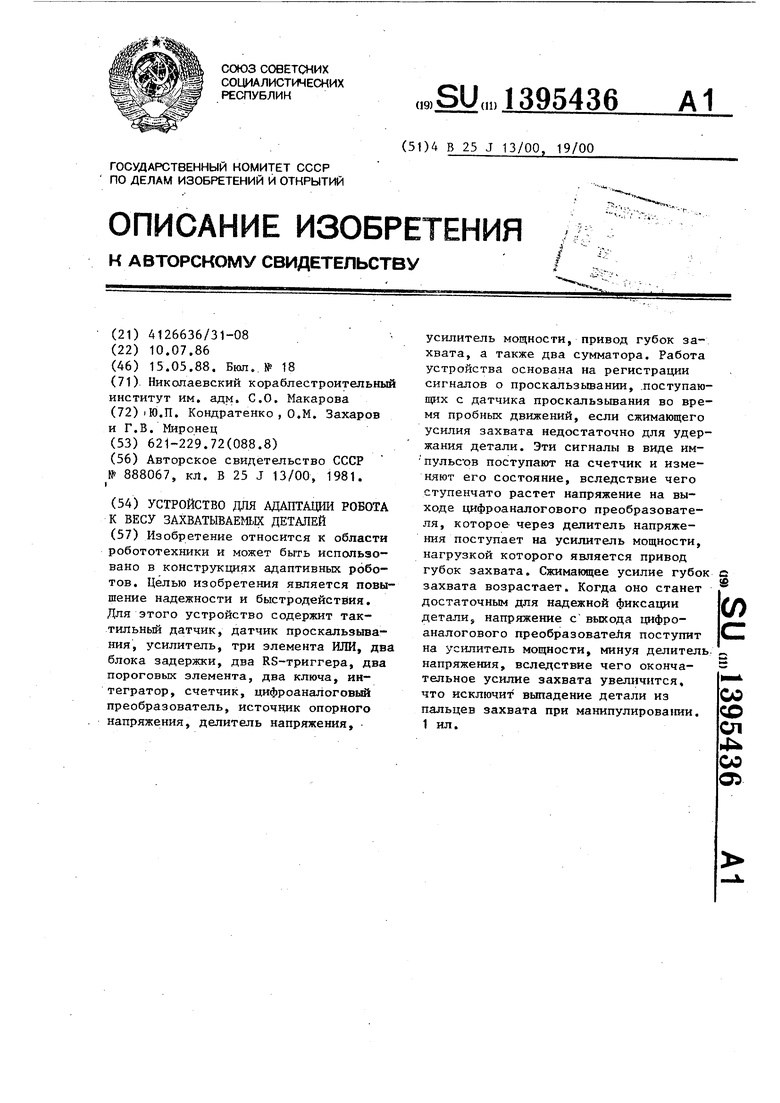
скальзывать в губках захвата, что вы-дл задержки 8, на второй вход третьего зывает срабатывание датчика проскаль- зьгаания 2, сигнал с которого, будучи усилен усилителем 3, подается на второй вход первого элемента ИЛИ 4, ла первьй вход счетчика 16, на третий вход третьего элемента ИЛИ 6 и на второй вход второго элемента ИЛИ 5. На выходе последнего также появляется сигнал, который подается на второй вход интегратора 15, вследствие чего напряжение на выходе интегратора 15 сбрасывается до нуля. Сигнал, посту пивший на первьй вход счетчика 16, вызьшает увеличение в двоичном коде на единицу состояния на его выходе.
50
55
элемента ИЛИ 6 и на управляющий вход второго ключа 14. При этом сигнальны вход второго ключа 14 отключается от его первого сигнального выхода и подключается к второму сигнальному выходу. Это приводит к тому, что выходной сигнал Up,- и 5П+ idU (где i номер,ступени сжимающего усилия) сум матора 22 поступает на второй вход сумматора 23, минуя дел11тель 19, т. будет в К раз больше предыдущего си нала Ь . . Одновременно сигнал на втором входе третьего элемента ШШ 6 вы зывает сигнал на выходе последнего, срабатывание первого ключа 13, а сле довательно, подачу увеличенного в К раз напряжения Up,- на усилитель мощности 20 и далее - на привод 21, который соответственно увепичивает ежи
а следовательно, и приращение напряжения ли на выходе цифроаналогово- го преобразователя 17, которое поступает на первый вход первого
задержки 8, на второй вход третьего
элемента ИЛИ 6 и на управляющий вход второго ключа 14. При этом сигнальный вход второго ключа 14 отключается от его первого сигнального выхода и подключается к второму сигнальному выходу. Это приводит к тому, что выходной сигнал Up,- и 5П+ idU (где i - номер,ступени сжимающего усилия) сумматора 22 поступает на второй вход сумматора 23, минуя дел11тель 19, т.е. будет в К раз больше предыдущего сигнала Ь . . Одновременно сигнал на втором входе третьего элемента ШШ 6 вызывает сигнал на выходе последнего, срабатывание первого ключа 13, а следовательно, подачу увеличенного в К раз напряжения Up,- на усилитель мощности 20 и далее - на привод 21, который соответственно увепичивает ежимающее усилие захвата, причем последнее приращение усилия необходимо для исключения вьшадакия детали вследствие ускорений, возникающих при дальнейшем манипулировании. Сигнал, поступивший на вход второго блока задержки 8 и задержанный последним на время необходимое, для отработки конечного приращения сжимающего усилия, посту- :пает на третий вых:од устройства и сиг |нализирует-о возможности вьшолнения роботом следующей операции, а также - на второй вход первого триггера 9, ;Первый вход второго элемента ИЛИ 5 и на второй вход счетчика 16, причем в первом случае сигнал сбрасывает первый RS-триггер 9 в нулевое состоя- ние, ВО втором, пройд:1,я через второй элемент ШШ 5 и поступив на второй вход интегратора 15 сбрасывает его ;в нулевое состояние, а также и счет- чик 16. Таким образоМ;, устройство доказывается в исходном состоянии. ; Если на предпоследнем (г-1)-м пробном шаге, количество г которых определяется разрядностью счетчика 16 , надежной фиксации детали в губках захвата не произойдет, то выходное напряжение uUr и;ифроаналогового преобразователя 17 приводит к сраба- .;тьгоанию второго порогового элемента 12, а следовательно, на второй выход устройства будет подан сигнал, информирующий о невозможности осуществления захвата детали.
Формула изобретения
Устройство для адаптации робота к весу захватываемых деталей, содержащее последовательно соединенные датчик проскальзывания детали и усилитель, тактильный датчик, установленный на одной из губок захвата, первы блок задержки, а также привод губок захвата, отличающееся тем, что, с целью првьшения быстродействия и надежности, оно дополни- 0 5 п
5
0
5
тельно содержит первый элемент ИЛИ, последовательно соединенные первый RS-триггер, интегратор, первьй пороговый элемент, второй блок задержки и второй элемент ИЛИ, последовательно соединенные счетчик, цифроаналоговый преобразователь, первый сумматор, второй ключ, делитель напряжения, второй сумматор, первьй ключ и усилитель мощности,, а также второй поро- говьш элемент, источник опорного напряжения и последовательно соеди ненные второй Е.8-триггер и третий элемент ИЛИ, выход которого соединен с управляющим входом первого ключа, при этом выход тактильного датчика .подключен к первым входам первого элемента ИЛИ и первого RS-триггера, выход усилителя подключен к второму входу первого элемента ИЛИ, к первому входу счетчика, к второму входу второго элемента ИЛИ и к третьему входу третьего элемента ИЛИ, выход iпервого блока задержки соединен с выходом устройства и с вторым входом второго RS-триггера, первьй вход которого соединен с входом устройства, выход второго блока задержки соединен с вторыми входами первого RS-триггера и счетчика, а также с третьим выходом ycTpoficTBa, выход второго элемента ИШ- подключен к второму входу интегратора, выход первого порогового элемента подключен к второму входу третьего элемента ИЛИ и к управляющему входу второго ключа, источник опорного напряжения подключен к второму входу первого сумматора, выход цифроаналогового преобразователя соединен с входом второго порогового элемента выход которого соединен с вторым выходом устройства, второй вход второго сумматора подключен к второму выходу второго ключа, выход первого элемента ШШ соединен с входом вервого блока задержки, а вькод усилителя мощности соединен с входом привода губок захвата.
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
