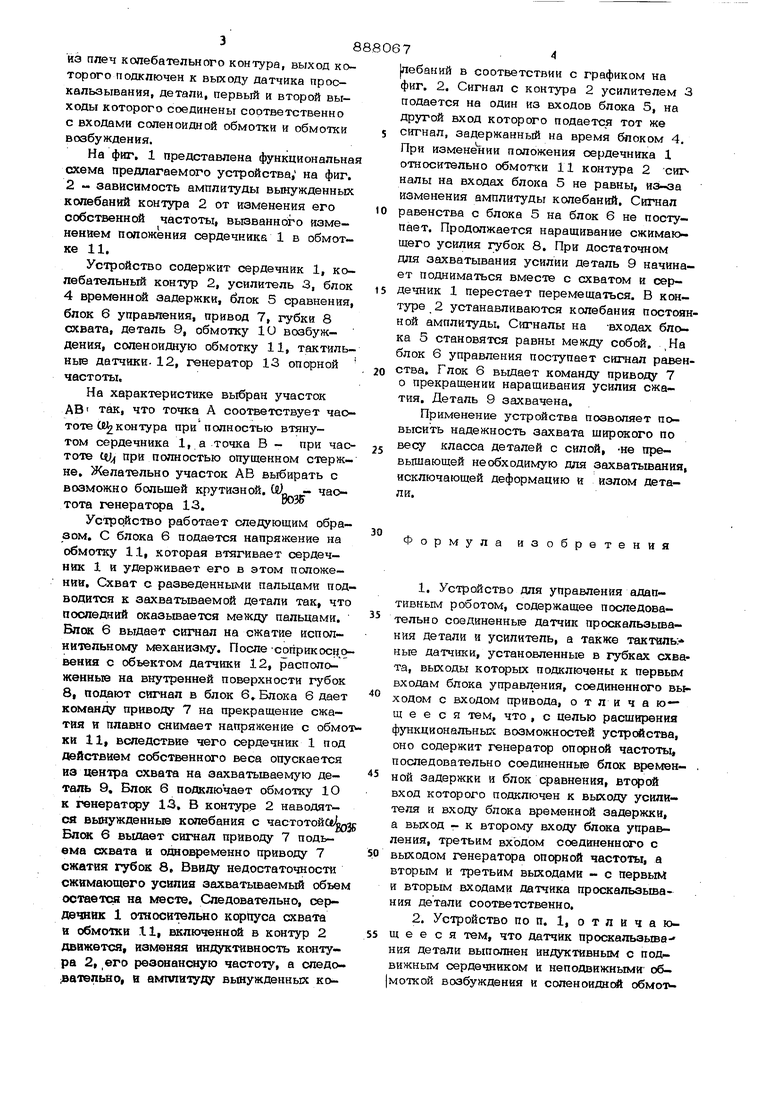
Изобретение относится к робототехнике Н может быть применено для автоматизации производственных процессов с применением роботов, снабженных очувств ленными захватами. Известно устройство для управления охватом манипулятора содержащее датчик момента, сумматор, усилитель, и исполнительный механизм, который не обеспечивает сжимающего усилия, адекватного весу захвачена ей детали 1. Наиболее близким решением по техни ческой сущности и достигаемому результату к изобретению является устройство , свдзржащее последовательно соединенHbife датчик проскальзывания детали и ус литель, а Также тактильные датчики, установленнью в губках схвата, выходы которых подключены к первым входам управления, соединенного выходом с входом привода. Недостатком этого устройства являет ся дискретность управления изменением сжимающего усилия пальцев захвата, что дриводит к несоответствию между сжима юшим усилием и весом детали, а это в конечном счете приведет к деформации детали. Целью изобретения является расширение функциональных возможностей устройства. УстрсЛство содержит генератор опо(« нсА частоты, последсвательно соединеннью блок временной задержки и блок сравнения, второй вход котсфото подключен к выходу усилителя и блока временной задержки, а выход - к второму входу блока управленвя, третьим входом соединенного с выходом т нератора опорной частоты, а вторым и третьим вькодами - с первым и вторым входами датчика проскальзывания детали cooTBeTCTBeuHOj датчик проскальзывания детали выполнен индуктивным с подвижным сердечником и неподвижными обмооксЛ возбуждения и сопеноидн(Я обмоткой, составляющей одно 8 из плеч колебательного контура, выход которого подключен к вькоду датчика проскальзывания, детали, первьй и второй выходы которого соединены соответственно с входами соленоидной обмотки и обмотки возбуждения. На фиг. 1 представлена функциональна схема предлагаемого устройства, на фиг. 2 - зависимость амплитуды вьшункденных колебаний контура 2 от изменения его собственной частоты, вызванного изменением положения сердечника 1 в обмотке 11. Устройство содержит сердечник 1, колебательный контур 2, усилитель 3, блок 4 временной задержки, ёлок 5 сравнения, блок б управления, привод 7, губки 8 схвата, деталь 9, обмотку Ю возбуждения, соленоидную обмотку 11, тактильные датчики- 12, генератор 13 опорной частоты. На характеристике выбран участок АВ так, что точка А соответствует частоте (виконту ра приполностью втянутом сердечника 1,.а точка В - при час тоте Ц) при полностью опущенном стержне. Желательно участок АВ выбирать с возможно большей крутизной. Ц,„,г- час - ООЗО тота генератора 13. Устройство работает следующим образом. С блока 6 подается напряжение на обмотку 11, которая втягивает сердечник 1 и удерживает его в этом положении. Схват с разведенными пальцами под водится к захватываемой детали так, что последний оказьюается между пальцами. Блок 6 выдает сигнал на сжатие исполнитепьнсчму механизму. После -срприкосч.о вения с объектом датчики 12, расположенные на внутренней поверхности губок 8, подают сигнал в блок 6, Блока 6 дает команду приводу 7 на прекращение сжатия и плавно снимает напряжение с обмо ки 11, вследствие чего сердечник 1 под действием собственного веса опускается из центра схвата на захватьшаемую деталь 9, Блок 6 подключает обмотку Ю к генератс эу 13, В контуре 2 наводятся вьшужденные колебания с частотойСе Блок 6 выдает сшгаал приводу 7 подьема схвата и одновременно приводу 7 сжатия губок 8, Ввиду недостаточности сжимающего усилия захватываемый обье остается на месте. Следовательно, сердвчннк 1 относительно корпуса схвата и обмотки 11, включенной в контур 2 движется, изменяя индуктивность контура 2, ,его резонансную частоту, а следовательно, и амплитуду вьюужденных ко7|лебаний в соответствии с графиком на фиг. 2. Сигнал с контура 2 усилителем 3 подается на один из входов блока 5, на другой вход которого подается тот же сигнал, задержанный на время блоком 4, При изменении положения сердечника 1 относительно обмотки 11 контура 2 сиг налы на входах блока 5 не равны, из-за изменения амплитуды колебаний. Сигнал равенства с блока 5 на блок 6 не поступает. Продолжается наращивание сжимак щего усилия губок 8. При достаточном для захватывания усилии деталь 9 начинает подниматься вместе с схватом и сердечник 1 перестает перемещаться. В контуре 2 устанавливаются колебания постоянной амплитуды. Сигналы на -входах блока 5 становятся равны между собой. ,На блок 6 управления поступает сигнал равенства. Глок 6 выдает команду приводу 7 о прекращении наращивания усилия сжатия. Деталь 9 захвачена. Применение устройства позволяет повысить надежность захвата щирсжого по весу класса деталей с силой, -не превышающей необходимую для захватывания, исключающей деформацию и излом детали. Формула изобретения 1.Устройство для управления адаптивным роботом, содержащее последовательно соединенные датчик проскальзывания детали а усилитель, а также тактиль: ные датчики, установленные в губках схвата, выходы которых подключены к первым входам блока управления, соединенного выходом с входом привода, о т л и ч а ю- щ е е с я тем, что , с целью расщирения функциональных возможностей устрсЛства, оно содержит генератор опорной частоты, последовательно соединенные блок временной задержки и блок сравнения, второй вход которого подключен к выходу усилителя и входу блока временной задержки, а выход - к второму входу блока управления, третьим входом соединеннсяО с выходом генератора опорной частоты, а вторым и третьим выходами - с первым и вторым входами Датчика проскальзывания детали соответственно. 2.Устройство по п. 1, отличающееся тем, что датчик проскальзьта-ния детали выполнен индуктивным с подвижным сердечником и неподвижными об моткой возбуждения и соленоиднсй обмот кой, ссхзтавпяющей одно из плеч колебательного контура, выход которого подключен к выходу датчика проскальзывания, летали, первый и вт(сй входы которого соединены соответственно с входами селеноипной обмотки и обмотки возбужпения. 8 67 Источники информации, принять з во внимание арк экспертизе 1.Авторское свидетельство СССР № 278371, кл. В 23 Q , 1970. 2. в др. Микропроцессорные средства. -Рига, Зинатне, , 1977, с. 172-180 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Устройство для управления схватом манипулятора | 1989 |
|
SU1754439A1 |
| Схват промышленного робота | 1986 |
|
SU1433792A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Устройство для управления адаптивным роботом | 1984 |
|
SU1188700A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват робота | 1991 |
|
SU1821360A1 |
| Схват | 1986 |
|
SU1313700A1 |
| Устройство для управления адаптивным роботом | 1988 |
|
SU1541556A2 |
