Изобретение относится к системам управления угловым движением динамических объектов, а именно к системам ориентации и стабилизации.
Целью изобретения является повышение быстродействия систем за счет сокращения времени на совершение пространственных угловых разворотов ди- на).щческого объекта. .IQ
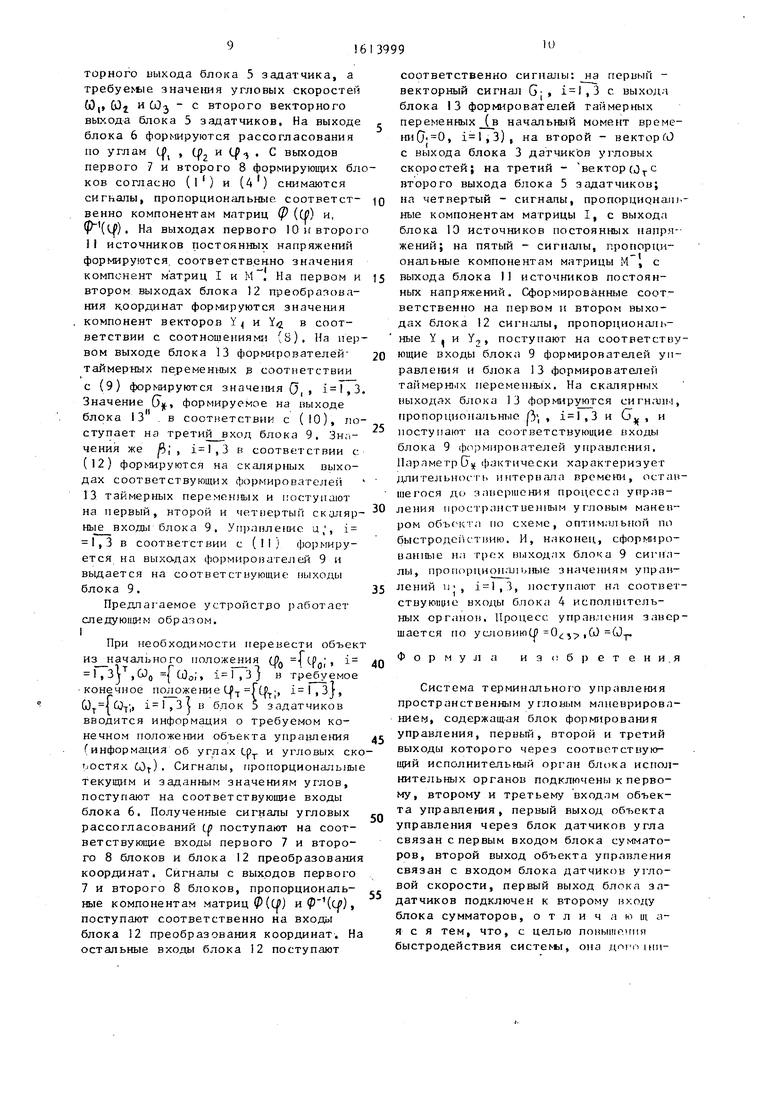
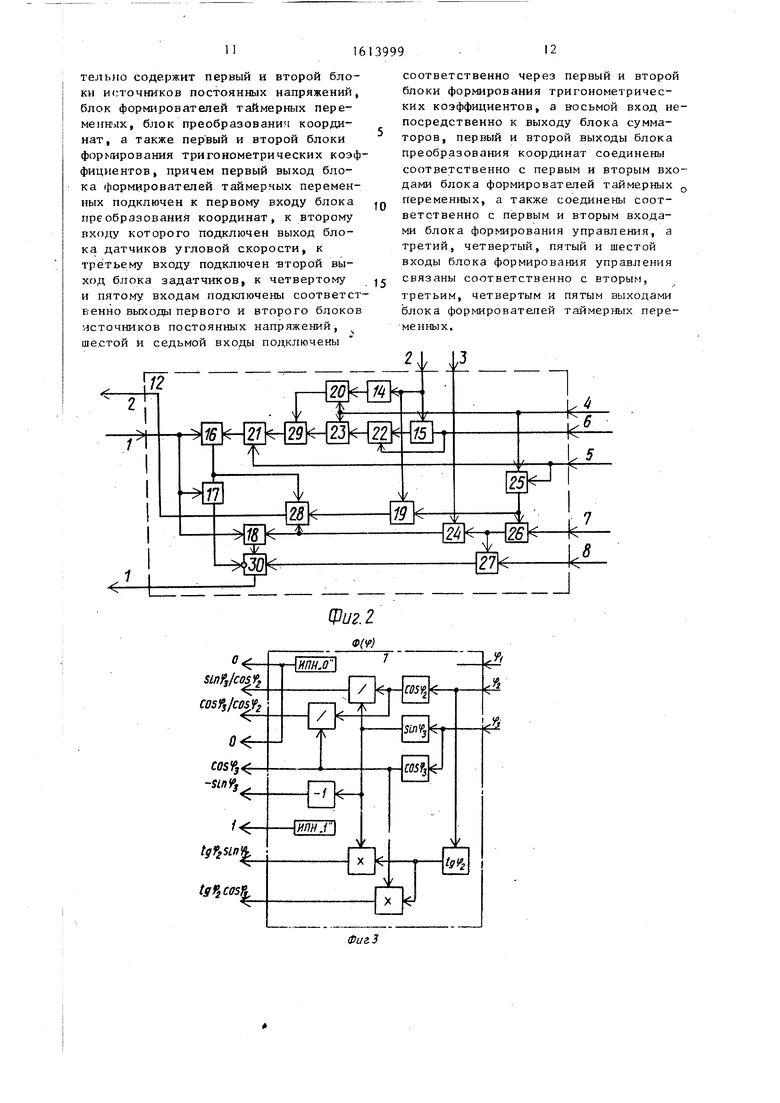
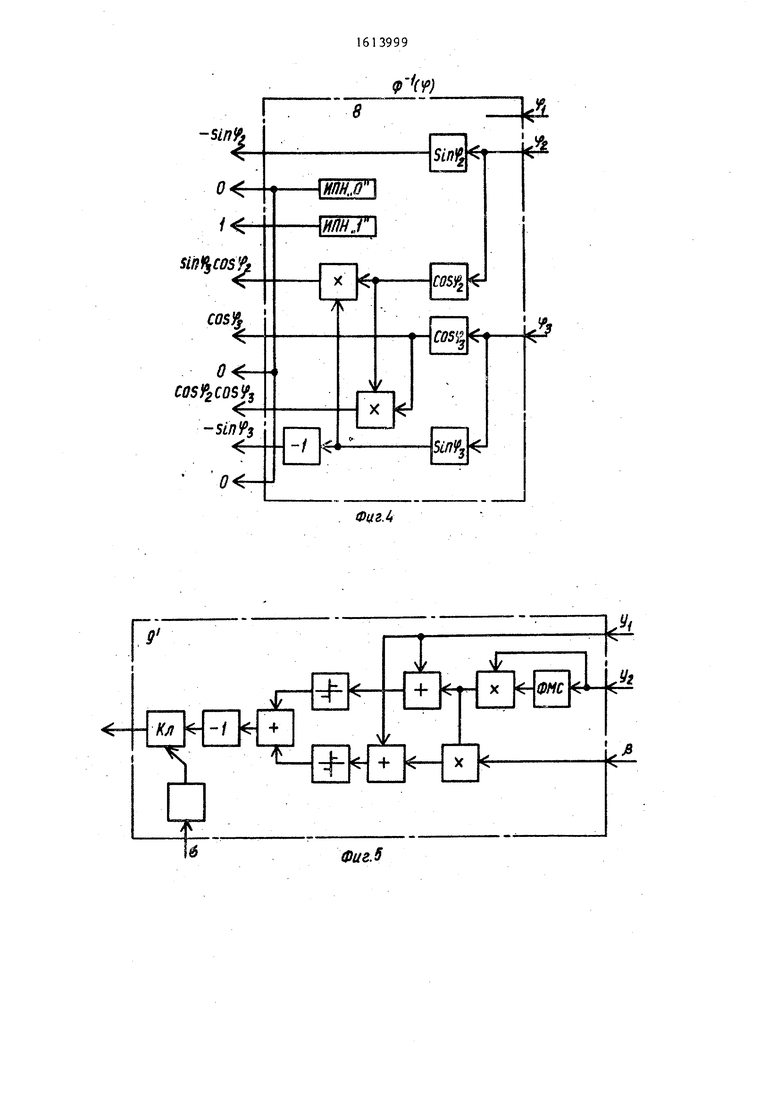
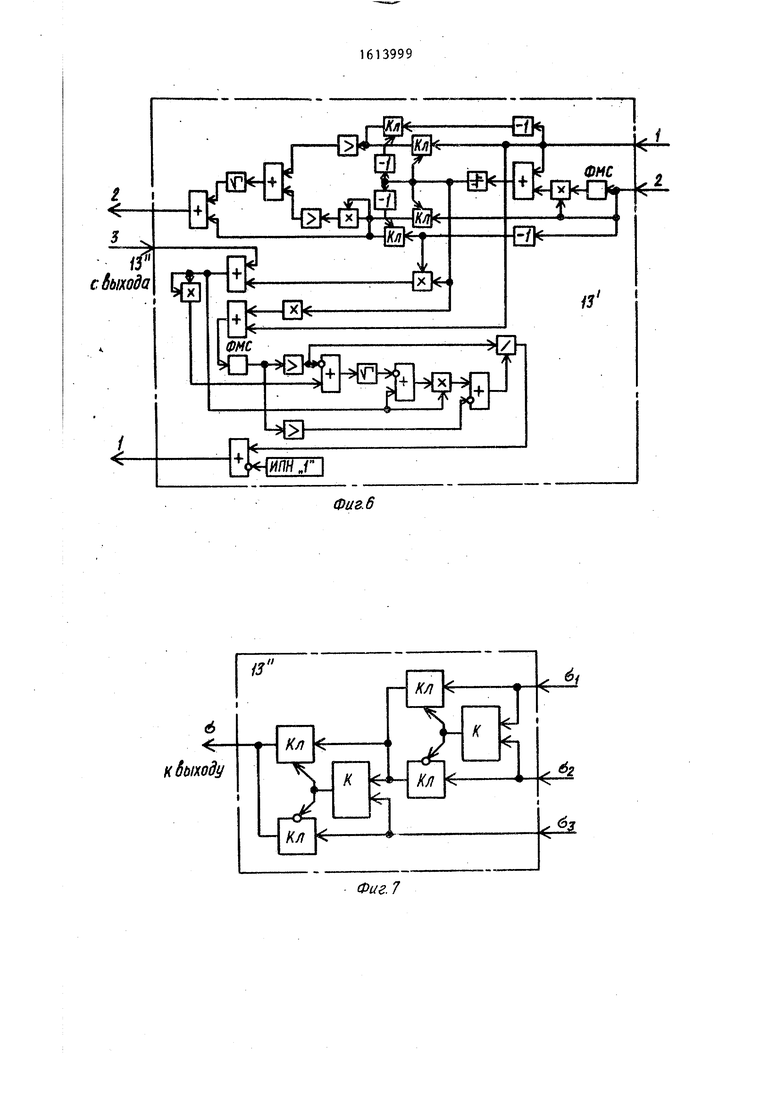
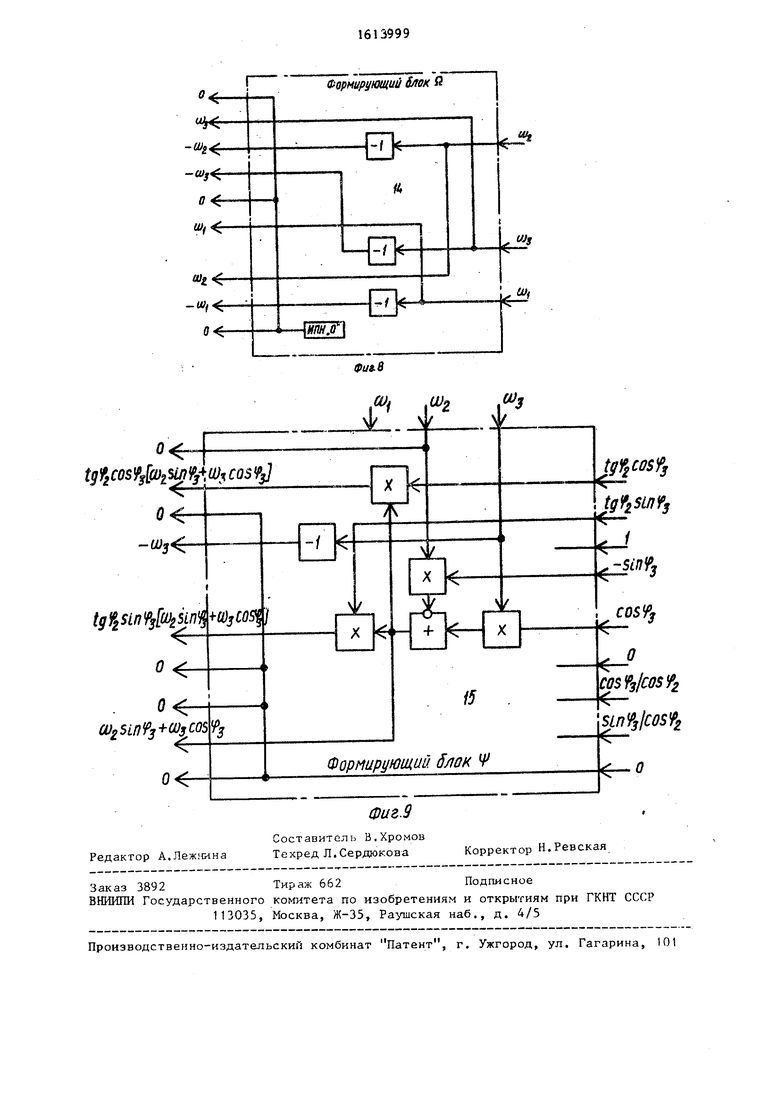
На фиг. 1 представлена функциональная схема систег терминального управения пространственным угловым маневрированием; на фиг. 2 - функциональная схема блока преобразования коорди-15 наг; на фиг. 3 и 4 - функциональные схемы первого .и второго блоков формирования тригонометрических коэффициентов; на фиг. 5 - схема блока формиования управления; на фиг. 6 - схе- 20 ма формирователя таймерных -переменных; на фиг. 7 - схема блока выделения максимальных значений; на фиг. 8 - схема блока формирования угловых скоростей; на фиг. 9 - схема блока фор- 25 мирования коэффициентов.
Система (фиг. 1) содержит объект . 1 управления, блок 2 датчиков углов, блок 3 датчиков угловых скоростей, лок 4 исполнительных органов, блок 5 JQ задатчиков, блок 6 сумматоров, первый 7 и второй 8 блоки формирования тригонометрических коэффициентов, блок 9,формирования управления, состоящий из трех формирователей, пер- 5 вый 10 и вт орой 1 1 блоки источников постоянных напряжений, блок 12 преобразования координат, блок 13 формирователей таймерных переменных, состоящих из трех формирователей 13 тай- 40 мерных переменных и блока 13 выделения максимального значения.
Блок 12 преобразования координат (фиг. 2) содержит блок 14 формирования угловых скоростей, блок 15 форми- 45 рования коэффициентов, три блока умножителей 16-18, девять матричных множителей 19-27 и три блока сумматоров 28-30.
50
На фиг. 3 и 4 обоз-начены: sinif,. ., iCOsCfj- нелинейные блоки, реализующие тригонометрические функции от входных величин; ИШ О и - источники нулевого и единичного посте-- янных напряжений; 1 - скалярный делитель; X - скалярный множитель; 1 - инвертор.
На фиг. 5 и 6 обозначеиа: ШС - формирователь модуля сигнала; + - скалярный сумматор; Кл - 1б1юч| - усилитель; - нелинейный элемент корень квадратный ; f - релейный элемент; К - компаратор.
В оснойу изобретения положены следующие соображения.
Динамика пространственного углового движения объекта в общем виде описывается системой динамических управлений Эйлера и кинематических соотношений в углах Эйлера-Крьшопа:
6;)((0)Ь -1 ми;(1)
(Ч )М,
Г 7
где СО |м;, ,3 - вектор угловых
скоростей вржце-,ния объекта;
Lf |Ср; , ,3j- вектор относительных углов ориентации (угловых рассогласований) объек- г. jr тов;
|u; |6 1 , , 31- вектор ограни- .
ченных управляющих параметров , 3J - матрица распределения управляющих моментов по каналам управления;
I , 3j - тензор инерции объекта управления;
Q((0)
О QJ- «2
-ООз О СД(
CJi- 03, О
ICf)1 .sin% tgt coscf, f}
О IcosLf, U-sia tfj T
0. 1
costfa
j COSify.
Введем в рассмотренные матрицу V / , Нматрицу столбец 0 col((,CO) и за счет преобразования координат представим cHcrcNry (1) в виде:
(.(Q), X(0)-v (f3, V),
:2)
где Х,,; , .i-lT J i :., х
2
g16139996
ГУ- « ™-1 Де .- - оператор скалярного
pa квазикоординат, квазискоростей иизведения векторов,
параметров управления в новом коордиРаскрывая операторные скобки в
натном базисе.
Для этого воспользуемся неособыми преобразованиями, построенныю на основе результатов теории алгебр Ли векторных полей. Можно записать
«ЬС МО ) , . ) , :.
It ав
ражении (3) и воспользовавшиЬь из ной методикой решения дифференциа ных уравнений в частных производн получим:
x,(/S 10 x.)W;(3
v ) ((/)w(J (Ч )ф
,3, (3)
v F(e)p(lp))(q))r 5((0,) +((f)r Mu;
Расписав по .с соотношений с у сложных преобр
произведения векторов,
Раскрывая операторные скобки в выражении (3) и воспользовавшиЬь извест- ной методикой решения дифференциальных уравнений в частных производных, получим:
x,(/S x.)W;(3 )
v ) ((/)w(J (Ч )ф .
Расписав последнее из приведенных соотношений с учетом (1), после несложных преобразований запишем:

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Электропривод | 1987 |
|
SU1515324A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Частотно-регулируемый синхронный электропривод | 1986 |
|
SU1319220A2 |
| ОЦЕНКА ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НАКЛОНЯЮЩЕГОСЯ ТЕЛА С ИСПОЛЬЗОВАНИЕМ МОДИФИЦИРОВАННОГО КВАТЕРНИОННОГО ПРЕДСТАВЛЕНИЯ ДАННЫХ | 2001 |
|
RU2253092C2 |
| Устройство для отображения векторных диаграмм на экране электронно-лучевой трубки | 1988 |
|
SU1541663A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| Электропривод с векторным управлением | 1985 |
|
SU1292153A1 |
Изобретение касается систем управления угловым движением динамических объектов, а именно систем ориентации и стабилизации. Целью изобретения является повышение быстродействия систем за счет пространственных угловых разворотов динамического объекта. Система терминального управления содержит объект управления 1, блок датчиков углов 2, блок датчиков угловых скоростей 3, блок исполнительных органов 4, блок задатчиков 5, блок сумматоров, первый 7 и второй 8 блоки формирования тригонометрических коэффициентов, блок формирователей управления 9, первый 10 и второй 11 блоки источников постоянных напряжений, блок преобразования координат 12, блок формирователей таймерных переменных. 9 ил.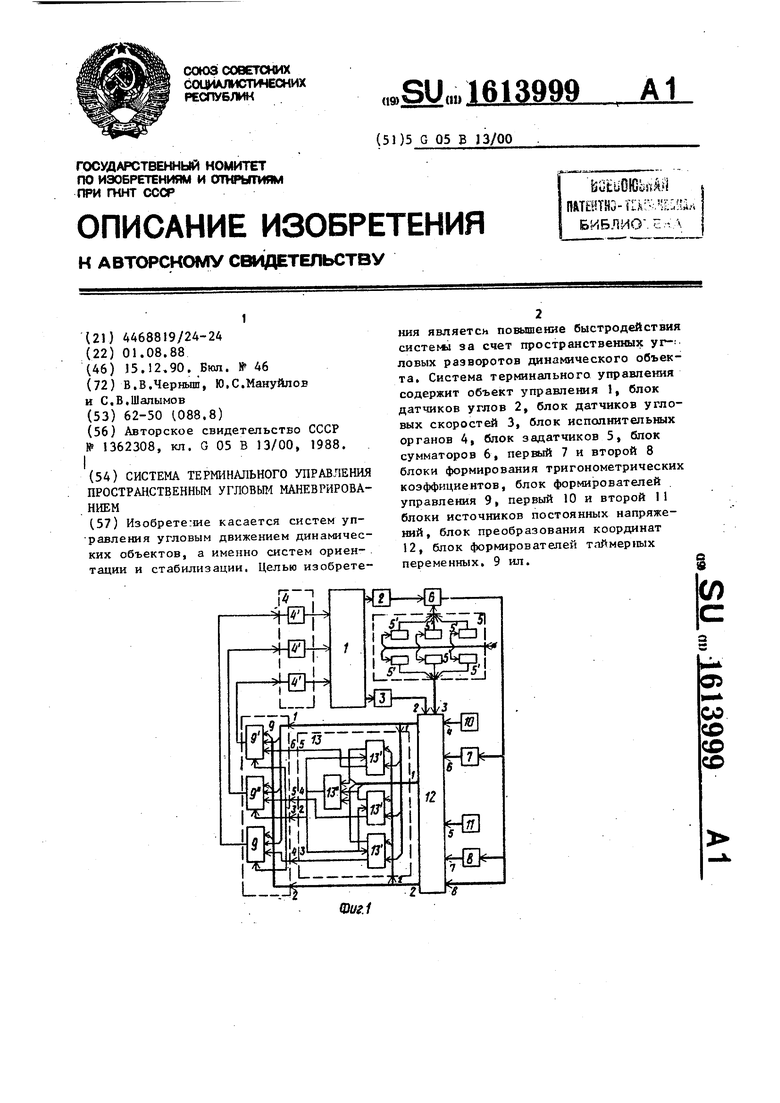
° I cSi qTj («zsin(j+u)jcos(/,) I tgq)j,(6L)2cosq j-(o,sinq)3) ..|.j
0
I -(W sint/j+WjCostp,)
.° zsintfi W s) I c55Lf- ). Разрешим данное уравнение относи-где V((J) (
тельно вектора управляющих парамет-h(9 )M TlVl6 )P(qj)+Q(G3)llcO ,
ров u и, после несложных преобра зо-
ваний, запишем
((p)v-h(9),(4)
где
О J UiSin4 }+W3CosU 3
I tiq sintf tfiJ sinqj +MjCosq,)- 0)3
о I
О tg(|jC05tf(0iSinq ,+(OjCosq 5)| Qi
.i.
I -slnCfj,
0 I cosq I coscpjsi i
U )
матрицы V и вектора h на некотором дд достаточно коротком интервале време- ни (такте управления) может быть
предложено линейное преобразование (Х, ,, УЯ):
,- -i- h+2.
, + Zh-VXj T,
Ij
0 j-sinCfj cosCfzCostfs
С учетом (4) условия ограниченности компонент вектора и могут быть45 представлены в виде
u l l(V(M )v);-h;(0)U 1, (5)
С учетом преобразования исходного.
координатного базиса ({{,W)- (х, , Xg) jQ независим,1Х двойных интеграторов: задача t-оптимапьного управления может быть сформулирована следующим образом.
Требуется обеспечить наискорейший перевод объекта (2) из состояния
(Х,(0), Х2(0)) в бостояние (О, Х.) с учетом ограничения (5). Данная задача немного проще исходной. Однако в предложении постоянства компонент
позволяющее получить систему из трех : двойн
I y.Y,;(7)
,.
где X,(fi
X2(tf)ni
Х2т(0) : , i-Olf ;
I tgq)j,(6L)2cosq j-(o,sinq j
I -(W sint/j+WjCostp,)
где
.
независим,1Х двойных интеграторов:
позволяющее получить систему из трех : двойн
I y.Y,;(7)
,.
где X,(fi
X2(tf)ni
Х2т(0) : , i-Olf ;
G.Ti-t - так называемая таймерная переменная, характеризующая ВремА, оставшееся до завершения роцесса управления в i-м канале управления;
YI д
1-1,2
: ::lw;U 1,
- вектора.фазовых координат и скоростей объекта в новом координатном базисе;
- вектор ограниченных управляющих параметров. При этом краевые условия исходной адачи t-оптимального управления пребразуются к виду
G;(y,;. У2;)1
УЗ; + +2(у2; ) -Уг; + . +2(у2; , А (y lS )
где
(у У2; )У(1 + -9 2i
Для обеспечения .одновременности завершения процесса управления по всем трем каналам Б качестве параметра (} , исполъзуемого дпя формирования Y|,(t), Y2(t), необходимо выбрать
. .
Поскольку в данном случаеG G, как правило, только для одного i-ro канала, а для всех других каналов вы- полняется неравенство (5j,Cr , ,3, , то и структура оптимального управления в разных каналах должна быть различной. В i-м канале должна быть структура.t-оптимального управления: W, : {±1 llf а в J-X каналах целесообразна структура энергетически-оптимального управления с двумя Jпepeключeниями: W : J±,0, j , 3, . Поскольку вектор w имеет тот же самый физический сг-ысл, что и вектор U, то формируемое для объекта (7) управление может непосредственно подаваться на систему исполни- тельных органов. Для реализации выпе перечисленных .структур управления целесообразно использовать известный регулятор, а .закон управления , им ре(Y(0), Y2(0))-(0, 0).
Заметим, что в соответствии с (3 ) X,(f, , а X i|)((f)0. Тогда с учетом (4) соотношения (6) могут быть представлены в виде:
Y,v(4))(+Zv(cf)aT- (q,03);
°Y M lQ-Y{cf)(q,Q ),(8)
где
h{Cp,03 ) l(f(Cf,G3 )((fh9.(CO) ;
15V(t)M l(p (CfJ.
I
Расчет таймерных переменных С , ,3 для каждого из каналов управления объектом (7) производится с ис- 20 пользованием соотношения
2; ) 2; ; )
30
. А;(. ) ov
} X;( . У2; )0; 0. ,)
I,
ализуемый, может быть представлен в , виде
,.() + (-Ap;) , (П) где . (у,; , у21 )У„ + У 2,(Уг (
Mr.VI
т G f()-2|rM 1j6, . ,
- I.G; -СТ. (12)
,-.
(
G -G;-y2i5;gn A;; R;(G) ..
Таким образом, предлагаемое устройство одновременно по всем трем каналам управления BpaniaTejEbHbiM движением объекта реализует закон (11) с учетом (8) и (9) в следующем порядке (фиг, 1).
Текущие значения углов ориентации связанного координатного базиса относительно опорного С , (и (5 снимаются с векторного выхода блока 2 датчиков углов, а текуи яе значения угловых скоростей СО, , (, и СО 5 с векторного выхода блока 3 датчиков угловых скоростей. Требуe.vbie значения углов (О,, Срг. и (S снимаются с первого век
торного выхода блока 5 задатчика, а требуеьые значения угловых скоростей СО,, COj и Ыз с второго векторного выхода блока 5 задатчиков. На выходе блока 6 формируются рассогласования по углам Cf, , tf2 Ч ч выходов первого 7 и второго 8 формирующих блков согласно () и (4) снимаются сигналы, пропорциональные, соответст- венно компонентам матриц (Р ((О) и, r (lp). На выходах первого 10 к второг 1I источников постоянных напряжений формируются соответственно значения
|
компонент матриц I и М . На первом и втором выходах блока 12 преобразования координат формируются значе шя компонент векторов Y и Y/j в соответствии с соотношениями (8), На первом выходе блока 13 формирователей таймерных переменных э соотнетствии с (9) фop иpyютcя значе1мя 0,, Значение (), формируемое на выходе блока 13 . в соответствии с (Ю), поступает на третий вход блока 9. Значения же ; , ,3 ti соответствии с (12) формируются на скалярных выходах соответствующих формирователе 13 таймерных перемен ых и поступают на первый, второй и четвертый скаляр- в ходы блока 9, Уг1) и;, i 1,3 в соответствии с (11) формируется на выхадах формнро)зателей 9 и выдается на соответствующие выходы блока 9.
Предлаг-аемое устройство работает следующим образом, i
При необходимости перевести объект
из начального положения ( f -Foi 1 , ЗУ jOg 1 СОо., ,3j в требуемое конечное положение t|-f ГС|)., ,з}, (х), ,3( в блок 5 задатчиков вводится информация о требуемом конечном положении объекта управления (информация об углах Ср и угловых ско ъостях ОЗт) Сигналы, пропорциональные текущим и заданным значениям углов, поступают на соответствующие входы блока 6. Полученные сигналы угловых рассогласований in поступают на соответствующие входы первого 7 и второго 8 блоков и блока 12 преобразования координат. Сигналы с выходов первого 7 и второго 8 блоков, пропорциональные компонентам матриц IP(CJ ) и ), поступают соответственно на входы блока 12 преобразования координат. На остальные входы блока 12 поступают
25
, Q
15 20 35
40
45
0
5
соответственно сигналы: на первый - векторный сигнал GJ, 1-1,3 с выхода блока 13 формирователей таймерных переменных (в начальный момент времени Q.0, ,3), на второй - вектор (О с выхода блока 3 датчик ов угловых скоростей; на третий - векторсо с второго выхода блока 5 задатчиков; на четвертый - сигнапы, пропорциднаш-- ные компонентам матрицы I, с выхода блока 10 источников постоянных напря-- жений; на пятьй - сигналы, пропорциональные компонентам матрицы М , с выхода блока I1 источников постоянных напряжений. Сформированные соответственно на первом и втором выходах блока 12 сигналы, пропорциональные Y и Y, поступают на соответствующие входы блока 9 формирователей уп- равле шя и блока 13 формирователей) таймерн1.1к переменных. На скгшярны.ч выходах блока 13 формируются сигн.члм, Г1ропорционш1ьн1 1е А , ,3 и С, и поступают на соответствующие входы блока 9 (|)0)мирователей управления. Параметр и, (|);зктически характеризует ;1Д1ительность п тервпла времени, оставшегося дс5 занершония процесса управления простр;11К:тве}П1ЫМ угловым манен- ром объоктл по схеме, оптимальной по быстродс1 1стиию. И, наконец, сформир ванные нп трех выходпх блока 9 сигналы, прог1орцион;1льные значениям управлений Ч , ,3, поступают на соответствующие входы блока 4 исполнительных органон. Процесс управления завер- щается по условиюСР .j ,Gi) О-р Формула изобретен и.я
Система терминального управления пространственным угловым маневрированием, содержащ.ая блок формирования управления, первьш, второй и третий выходы которого через соответствующий исполнительный орган блока исполнительных органов подключены к первому, второму и третьему входлм объекта управления, первый выход объекта управления через блок датчиков угла связан с первым входом блока сумматоров, второй выход объекта управления связан с входом блока датчиков угловой скорости, первый выход блока задатчиков подключен к второму входу блока сумматоров, о т л и ч а ю щ а- я с я тем, что, с целью ПОИЫШРЛГИЯ быстродействия cиcтe ы, она до-п нитель} о содержит первый и второй блоки и ;точников постоянных напряжений, блок формирователей таймерных пере- меиюлх, блок преобразования координат, а также первый и второй блоки формирования тригонометрических коэффициентов, причем первый выход блока формирователей таймерных переменных подключен к первому входу блока преобразования координат, к второму входу которого подключен выход блока датчиков угловой скорости, к третьему входу подключен -второй выход блока задатчиков, к четвертому и пятому входам подключены соответственно выходы первого и второго блоков источников постоянных напряжений, шестой и седьмой входы подключены
-Ъг
Фиг. 2
Ф(Ч)
Sinfj/COSff COSfj/COSfz
wsi5 -SLnf.
tgficosr.
соответственно через первый и второй блоки формирования тригонометрических коэффициентов, а восьмой вход непосредственно к выходу блока сумматоров, первый и второй выходы блока преобразования координат соединень соответственно с первым и вторым входами блока формирователей таймерных переменных, а также соединены соответственно с первым и вторым входами блока формирования управления, а третий, четвертый, пятый и шестой входы блока формирования управления связаны соответственно с вторым, третьим, четвертым и пятым выходами блока формирователей таймерных переменных.
I
Фиг.5
Фив.6
Фиг.7
Формирующий блок S
| Авторское свидетельство СССР № 1362308, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
