Изобретение относится к области оптической локации и может быть использовано в системах взаимной ориентации объектов.
Цель изобретения - повышение точности определения угловой координаты источника излучения в условиях фоновых помех.
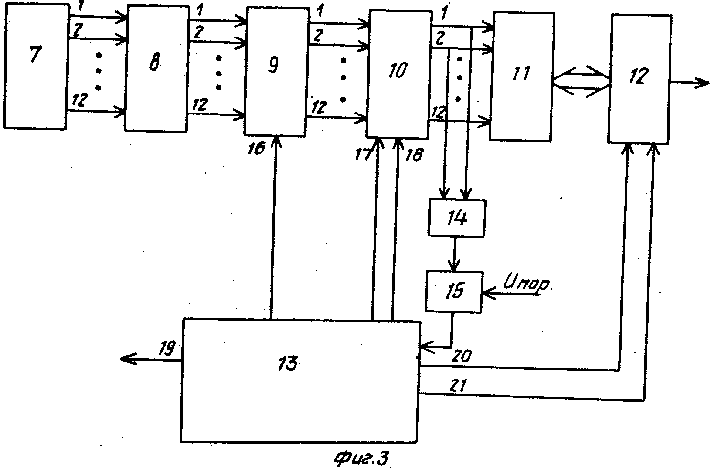
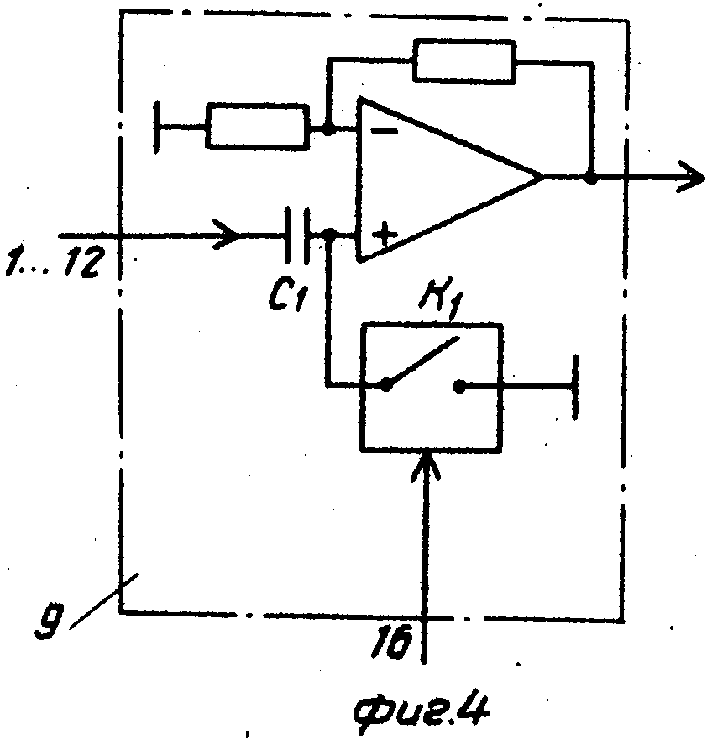
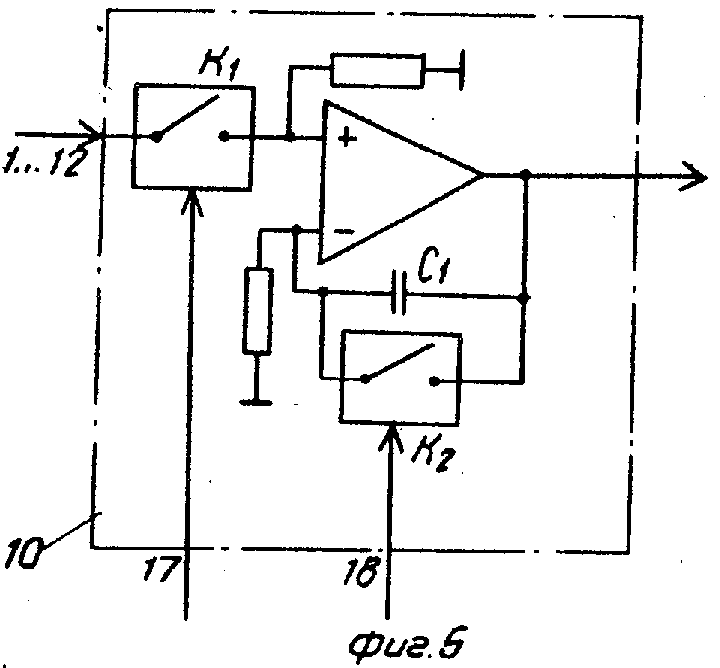
На фиг. 1 представлена схема формирования штрихового изображения источника; на фиг. 2 - временные диаграммы, поясняющие операцию подавления фоновых помех; на фиг. 3 - функциональная схема устройства для реализации способа; на фиг. 4 - схема 12-канального усилителя с фиксацией уровня фона; на фиг. 5 - схема 12-канального управляемого путегратора, где приняты следующие обозначения: 1 - штриховое изображение источника; 2 - области фоточувствительности прямых каналов; 3 - области фоточувствительности инверсных каналов; 4 - области фоточувствительности каналов одного разряда; 5 - поток излучения точечного источника; 6 - формирователь изображения (цилиндрический объектив); 7 - шестиразрядный кодовый фотоприемник; 8 - 12-канальный преобразователь ток-напряжение; 9 - 12-канальный усилитель с фиксацией уровня фона; 10 - 12-канальный управляемый интегратор; 11 - схема интерфейса; 12 - цифровой процессор; 13 - устройство управления; 14 - аналоговый сумматор; 15 - компаратор; 16 - 21 - выходы устройства управления; хо - координата штриха засветки; х1 - первая составляющая координаты; х2 - вторая составляющая координаты.
Способ включает формирование штрихового изображения 1, 2а-канальное параллельное интегральное преобразование в фототоки распределения освещенности в перпендикулярном оси штриха направлении при распределении фоточувствительности в каждой паре каналов области 4 фоточувствительности каналов одного разряда в соответствии с прямым 2 и инверсным 3 значениями n-разрядного кода Грея, образование межканальных разностей сигналов, определение координаты штриха хо путем суммирования двух составляющих х1 и х2. Формирование изображения может быть осуществлено либо цилиндрическими объективами 6, либо щелевыми формирователями изображения.
Преобразование в фототоки распределения освещенности в штрихе может быть реализовано кодовыми фотоприемниками на основе фотодиодных либо фоторезистивных структур параллельного действия.
Структура операции по подавлению фоновых помех основывается на следующих положениях:
- ввиду ограниченного динамического диапазона устройств накопления операции по подавлению коррелированных помех должны предшествовать операциям накопления;
- в условиях, когда максимальная длительность импульса излучателя, исходя из его энергетических возможностей, превышает время корреляции фоновой помехи, эффективное подавление помех возможно при формировании сравнительно длинного импульса излучателя со сравнительно короткими паузами во время его действия для измерения быстро меняющегося уровня фона;
- в условиях, когда излучатель может располагаться на существенно различных дальностях, а значит создавать на входе приемного блока потоки излучения с существенно (на один-два порядка) отличающимися уровнями энергии, существует возможность уменьшить среднее (по дальности) время получения информации об излучателе для обеспечения заданной точности единичного измерения путем накопления до заданного порога принятых сигналов и соответствующим управлением излучателем. Цикличность накопления, необходимого для единичного измерения, определяется временем корреляции фоновой помехи, а максимальная длительность накопления - энергетическими возможностями излучателя;
- уровень принимаемой энергии излучателя независимо от его угловой координаты определяется суммарным сигналом прямого инверсного канала одного разряда.
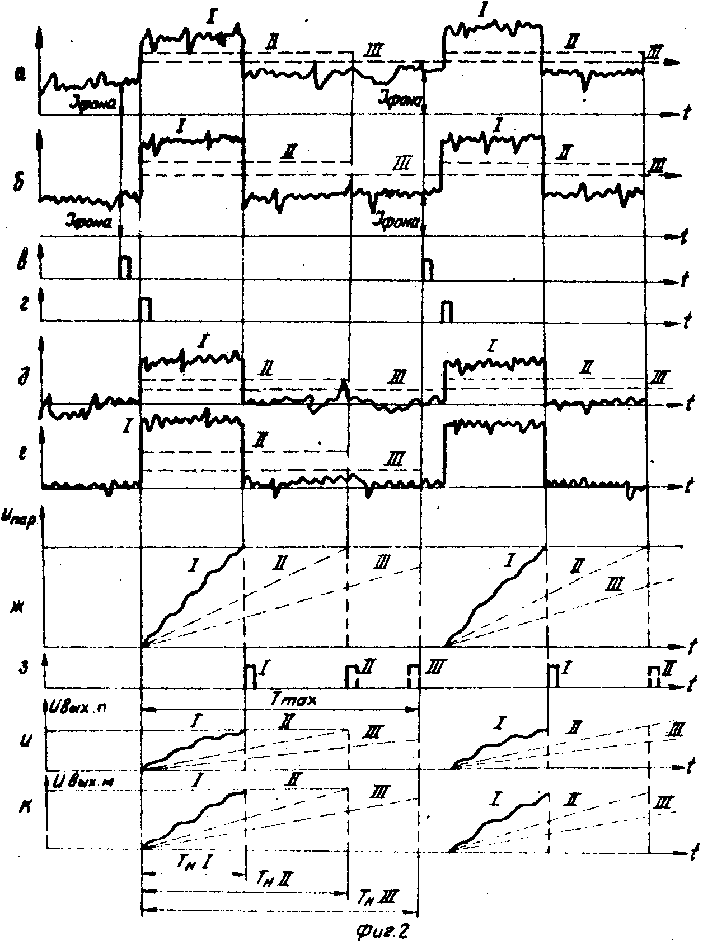
Для иллюстрации операции по подавлению фоновых помех (фиг. 2) выбраны три значения уровня энергии (обозначены индексами I, II, III), создаваемые излучателем на фотоприемной поверхности, характеризующие положения излучателя на соответствующих увеличению дальностях (I, II, III) на одном и том же пеленге, что отражено на диаграммах в одинаковом соотношении сигналов прямого и инверсного каналов одного разряда. Иллюстрация соответствует однократной выборке (измерению) фона за время Тмакс, установленное для обнаружения - измерения координаты, т. е. соответствует режиму однократного включения излучателя и накоплению данных за один цикл.
Сигнал излучателя с уровнем I обеспечивает необходимое накопление до уровня порога Uпор за время Тн1, с уровнем II - за время Тн1. Сигнал с уровнем III не обеспечивает за максимальный временной интервал накопление до заданного порога Uпор. Следовательно, сигналы такого уровня не используются для определения координаты штриха. Реализация перечисленных операций возможна в устройствах дискретно-аналоговой обработки сигналов на основе схем выбора-хранения в интегральном исполнении, которые могут быть конструктивно объединены с фотоприемником.
Оценка координаты штриха засветки путем суммирования двух составляющих - грубой и точной оценки - определяется нелинейным характером оценки параметра положения. Грубая оценка определяет координату штриха с дискретом (ошибкой), достаточным для попадания в рабочую область дискриминатора (область ненулевых значений крутизны дискриминационной характеристики), который должен вырабатывать уточняющую добавку у грубой оценке положения.
Рабочие области дискриминатора могут быт сформированы в окрестности точек изменения фоточувствительности разрядов. Размеры рабочих областей определяются размерами штрихового изображения.
Ошибки фотоэлектрического преобразования, такие как неравномерность чувствительности, взаимосвязь между фотоячейками, приводят к погрешностям в определении координат. Рассмотрим процесс формирования ошибок и возможности их компенсации. Для положения штрихового изображения в области изменения фоточувствительности разрядов справедливы соотношения
I1 = S11Φ1 + S12 Φ2;
(1)
I2 = S21Φ1 + S22 Φ2, где I1 - сигнал прямого канала;
I2 - сигнал инверсного канала;
Φ1 - поток излучения, падающий на фотоячейку прямого канала;
Φ2 - поток излучения, падающий на фотоячейку инверсного канала;
S11 - чувствительность фотоячейки прямого канала;
S22 - чувствительность фотоячейки инверсного канала;
S12, S21 - чувствительность фотоячеек прямого и инверсного каналов, обусловленная взаимовлиянием каналов.
Для идеального определения нормированной межканальной разности А необходимо вычисление соотношения:
Δ =  (2)
(2)
Используя (1), перепишем (2) в виде
Δ =  (3)
(3)
Отношение  выражает отношение фоточувствительности смежных фотоячеек прямого и инверсного каналов.
выражает отношение фоточувствительности смежных фотоячеек прямого и инверсного каналов.
Обозначим  = β (4)
= β (4)
Отношения  и
и  выражают коэффициент взаимосвязи смежных фотоячеек прямого и инверсного каналов.
выражают коэффициент взаимосвязи смежных фотоячеек прямого и инверсного каналов.
Обозначим  =
=  = γ . (5)
= γ . (5)
Величины β и γ носят относительно постоянный характер, практически не меняя своего значения во времени и при изменениях температуры, однако для каждой пары смежных фотоячеек они могут принимать различные значения. В силу сказанного можем окончательно записать выражение для нормированной межканальной разности
Δi= 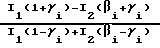 (6) где i - индекс, соответствующий коду первой составляющей координаты.
(6) где i - индекс, соответствующий коду первой составляющей координаты.
Величины γi и βi предлагается определять в ходе калибровки фотоприемника.
Устройство для реализации способа работает следующим образом.
Фотоприемник 7 осуществляет фотоэлектрическое преобразование изображения в соответствии с топологией фоточувствительных элементов. Фототоки с выходов (1-12) фотоприемника 7 поступают на преобразователь 8 ток-напряжение, где преобразуются в низкоимпедансные сигналы, и далее - на усилитель 9 с фиксацией уровня фона.
Подавление фоновой помехи осуществляется с помощью синхронизации моментов времени включения - выключения излучателя и моментов времени фиксации уровня фоновой составляющей, для чего устройство 13 управления на своих выходах 16-19 формирует соответствующие управляющие воздействия. При отсутствии управляющего воздействия (логического уровня) на выходе 19 в суммарной смеси сигнала и фона отсутствует сигнал излучателя. При этом на входе 16 усилителя 9 с фиксацией уровня фона устройство 13 управления формирует логический уровень, замыкающий ключ К1, и входное напряжение заряжает конденсатор С1 до уровня напряжения фона. После выключения ключа К1 на емкости С1запоминается с противоположным знаком по отношению к входному напряжению значение фоновой составляющей, что приводит к вычитанию из фоновой составляющей ее значения в момент времени замыкания ключа К1. Включение излучателя происходит при разомкнутом ключе К1, и сигнал излучателя, отсчитанный от уровня фоновой составляющей, поступает на управляемый интегратор 10.
Ключ К1 интегратора 10 находится в замкнутом состоянии при включенном излучателе и в разомкнутом при его выключении. Ключ К2интегратора 10 находится в разомкнутом состоянии в процессе интегрирования и в замкнутом при установке интегратора в нулевое состояние. Управление ключами К1 и К2 интегратора 10 осуществляется устройством 13 управления соответствующими командами, подаваемыми на входы 17, 18 интегратора 10.
Окончание процесса интегрирования определяется достижением суммой сигналов прямого и инверсного каналов младшего разряда (выходы 1 и 2 интегратора 10) уровня порогового напряжения, при этом формирование суммы происходит в сумматоре 14, сравнение ее с пороговым значением в компараторе 15, а в устройство 13 управления поступает команда в виде логического уровня напряжения с выхода компаратора 15. Далее устройство 13 управления останавливает процесс интегрирования, формируя команды выключения излучателя на своем 19-м выходе, размыкания ключа К1 на входе 17 интегратора 10 и команду "Запрос прерывания" (на ввод данных в цифровой процессор 12) на своем 20-м выходе. Цифровой процессор 12, реализованный в стандартной структуре, содержащей ОЗУ, ПЗУ и центральный процессор, по команде прерывания осуществляет управление схемой 11 интерфейса, где реализуется последовательное аналого-цифровое преобразование двенадцати аналоговых данных, и ввод преобразованных данных в собственное ОЗУ процессора. Если в течение максимального интервала, установленного для обнаружения излучателя, сигнал с выхода сумматора 14 не превысит пороговое значение Uпор, устройство 13 управления на своем 21-м выходе вырабатывает команду "Отсутствие в поле зрения излучателя", поступающую в процессор 12 по команде "Запрос прерывания", формируемую на 20-м выходе устройства 13 управления. После окончания ввода данных в процессор устройства 13 управления (это время для конкретного процессора заранее определено, и устройство управления не нуждается в сигнале, подтверждающем окончание ввода) формирует команду сброса интегратора 10 в нулевое состояние на 18-м входе интегратора, при этом происходит замыкание ключа 2 интегратора 10. Устройство 13 управления представляет собой стандартный микроконтроллер, содержащий центральный процессор, ПЗУ, таймер, запрограммированный на выполнение указанных операций.
В цифровом процессоре 12 проводятся операции по вычислению координаты штрихового изображения на основе поступивших в него двенадцати чисел, характеризующих сигналы штрихового изображения излучателя с выходом фотоприемника 7, а также следующих данных, предварительно записанных в ПЗУ процессора:
- коэффициентов βi и γi;
- дискриминационных характеристик нормированных межканальных разностей разрядов для заданного распределения освещенности в штрихе;
- величины шага изменения кода. (56) Техника средств связи, серия Техника телевидения, 1978, вып. 6, с. 25.
Оптико-механическая промышленность, 1983, N 2, с. 45.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАЗМЕРОВ ОБЪЕКТОВ | 2007 |
|
RU2348900C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОБЪЕМНОЙ ПРОИЗВОДИТЕЛЬНОСТИ ЭЛЕВАТОРА, В ОСОБЕННОСТИ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ | 1999 |
|
RU2249324C2 |
| Устройство для считывания информации | 1981 |
|
SU970404A1 |
| СПОСОБ ОРИЕНТАЦИИ СЛЕПОГО И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2188611C2 |
| ФОТОПРИЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2439747C1 |
| СПОСОБ МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ИСТОЧНИКОВ ЭМИССИИ И РАССЕЯННОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278401C1 |
| ОПТИЧЕСКИЙ УРОВНЕМЕР ЖИДКОСТИ | 1999 |
|
RU2159411C1 |
| УСТРОЙСТВО КОНТРАСТНОГО ИНФРАКРАСНОГО ИЗЛУЧЕНИЯ | 1988 |
|
SU1840307A1 |
| МАТРИЧНЫЙ РЕНТГЕНОВСКИЙ ПРИЕМНИК ДЛЯ СКАНИРУЮЩЕГО РЕНТГЕНОВСКОГО АППАРАТА | 2010 |
|
RU2403593C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПЕЛЕНГАТОР | 1986 |
|
SU1412459A1 |
Изобретение относится к области оптической локации и может быть использовано в системах взаимной ориентации объектов. Цель изобретения - повышение точности определения угловой координаты источника излучения. Существо способа заключается в формировании штрихового изображения 1,2n-канальном параллельном интегральном преобразовании в фототоки распределения освещенности в перпендикулярном оси штриха направлении при распределении фоточувствительности в каждой паре каналов области 4 фоточувствительности каналов одного разряда в соответствии с прямым 2 и инверсным 3 значениями n-разрядного кода Грея, образовании межканальных разностей сигналов, определении координаты Xo штриха путем суммирования двух составляющих X1 и X2 1 з. п. ф-лы, 5 ил.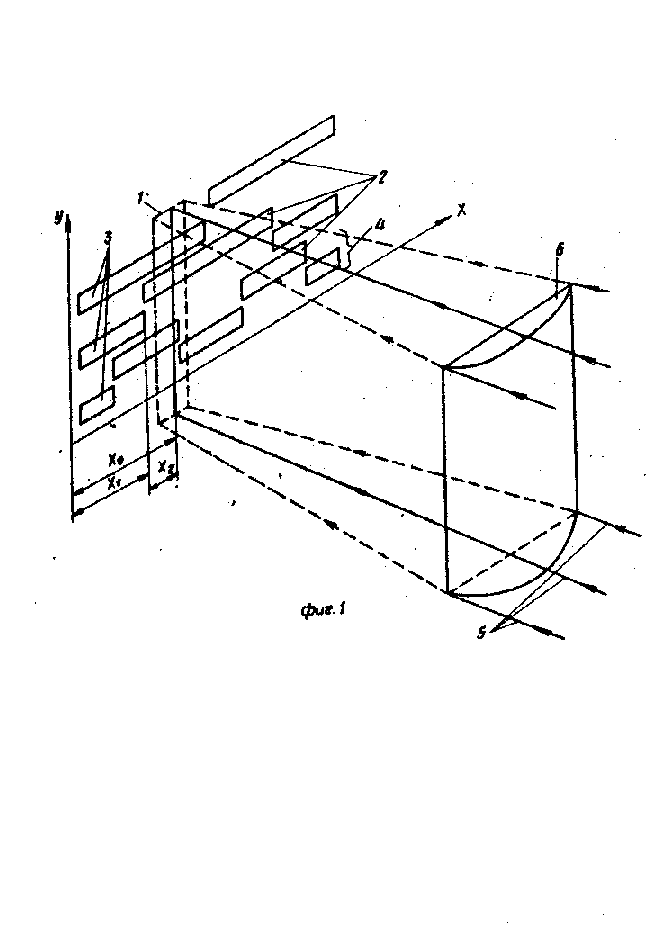
Δ=  ,
,
где I1 - сигнал с прямого канала разряда;
I2 - сигнал с инверсного канала разряда;
β2 - отношение фоточувствительности i-й пары смежных фотоячеек прямого и инверсного каналов одного разряда;
γi - коэффициент взаимосвязи i-й пары смежных фотоячеек прямого и инверсного каналов одного разряда;
i - индекс, соответствующий коду первой составляющей координаты.
