Изобретение касается оптической локации и может быть использовано для определения угловых координат источников излучения в системах оптической ориентации объектов, в робототехнике - для реализации систем технического зрения роботов.
Целью изобретения является повышение точности, быстродействия, уменьшение габаритно-весовых характеристик устройства.
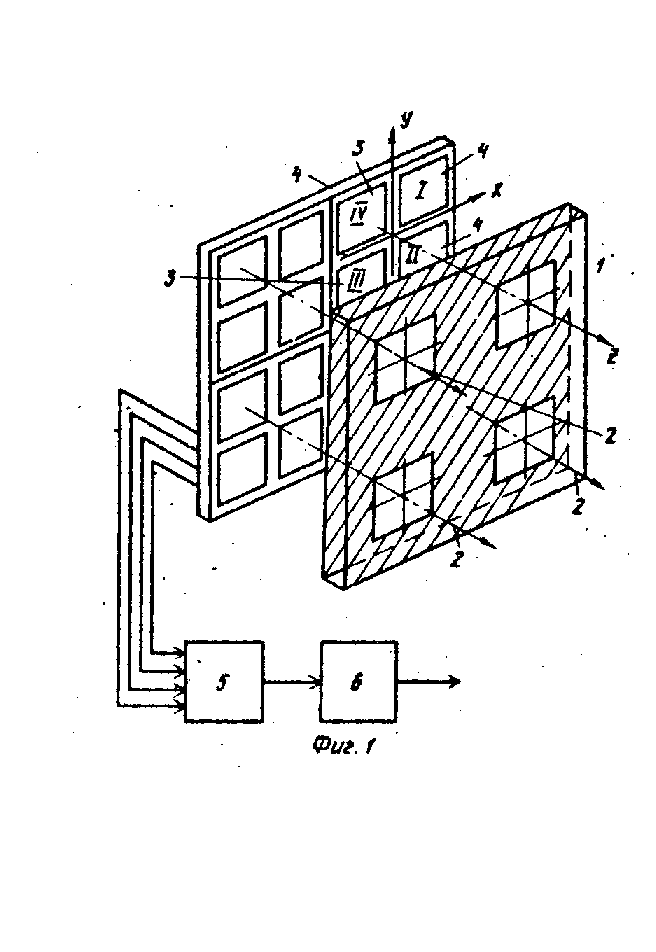
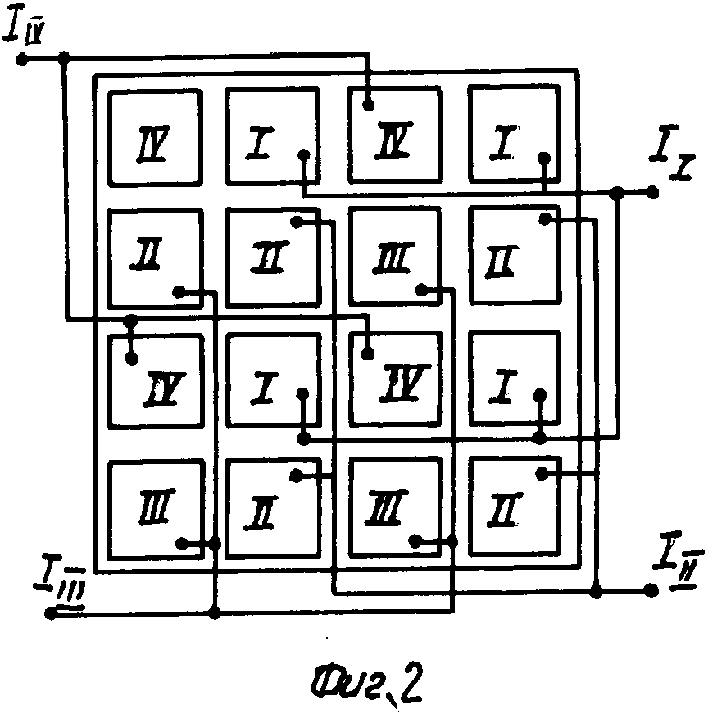
На фиг. 1 показана конструкция пеленгатора; на фиг. 2 - топология матрицы фотоячеек; на фиг. 3 - процесс измерения пеленга по одной координате.
Устройство содержит матрицу оптических систем 1; оптические оси матрицы 2; матрицу фоточувствительных ячеек 3; фоточувствительную ячейку 4; усилитель 5 сигнала фотоприемника; вычислитель пеленга 6; X, Y, Z - оси прямоугольной системы координат, связанные с данной ячейкой матрицы; I, II, III, IV - фоточувствительные элементы ячейки соответствующих квадрантов; II, III, IIII, IIV - выходы матрицы фотоячеек; лучи источника 7; растр линз 8; многощелевую диафрагму 9; плоскость фотоприемника 20 (матрицы фотоячеек), α- пеленг источника, f - фокусное расстояние, h - размер элемента (щелевой диафрагмы) по координате.
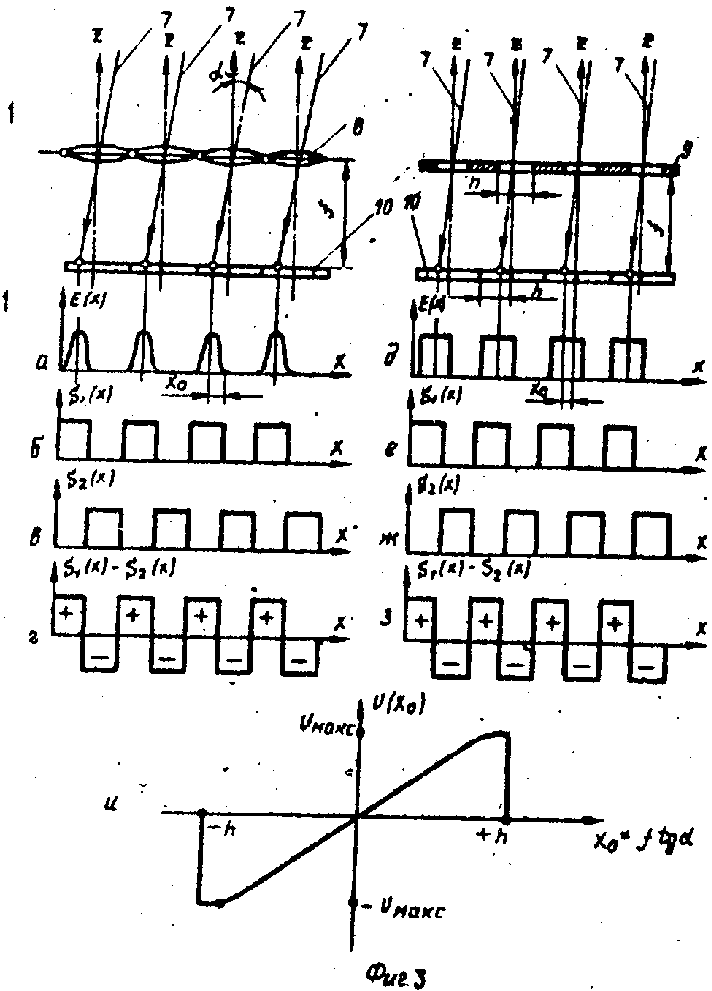
На диаграмме (фиг. 3а) показано распределение освещенности изображения, формируемое растром линз; на диаграмме (фиг. 3д) - многощелевой диаграммой. Здесь Хо - координата элементарного изображения.
На диаграммах (фиг. 3б, е, в, ж, г, з) изображены функции фоточувствительности соответственно S1(x), S2(x) и S1(x) - S2(x), образованные линейными комбинациями сигналов фотоприемного тракта.
На фиг. 3и показана дискриминационная характеристика пеленгатора. Здесь Uмакс и -Uмакс соответственно максимальное и минимальное выходные напряжения.
Оптико-электронный пеленгатор содержит формирователь изображения - матрицу оптических систем 1 (фиг. 1), оптические оси 2 которых параллельны одна другой, координатный фотоприемник - матрицу фоточувствительных ячеек 3, оптически сопряженных с матрицей оптических систем 1. Каждая ячейка 4 состоит из четырех независимых фоточувствительных элементов I, II, III, IV, расположенных в квадрантах прямоугольной X, Y-системы координат, связанной с данной ячейкой. Соответствующие оси координатных систем всех ячеек параллельны одна другой, а фоточувствительные элементы одноименных квадрантов всех ячеек параллельно соединены (фиг. 2). Оптически оси 2 (фиг. 1) матрицы оптических систем 1 совпадают с Z-осями систем координат соответствующих ячеек. Выходы фотоприемника 3 соединены со входами четырехканального усилителя сигналов фотоприемника 5, выходы усилителя 5 - со входами пеленгов 6.
Устройство работает следующим образом. Матрица оптических систем 1 формирует в плоскости матрицы фоточувствительных ячеек 3 ряд идентичных изображений удаленного источника. Положение изображений относительно соответствующих элементарных координатных систем матрицы фотоячеек характеризует направление на удаленный источник. Преобразованные в фототоки потоки излучения, попадающие на элементарные фоточувствительные элементы I, II, III, IV, суммируются в соответствии с принадлежностью к одноименным квадрантам по всем ячейкам приемника. Выходные сигналы фотоприемника представляют собой суммы фототоков II, III, IIII, IIV элементов одноименных квадрантов, которые после усиления в четырехканальном усилителе 5 поступают в вычислитель пеленга 6.
Вычисление пеленга происходит по формулам
tgαx=  K, (1)
K, (1)
tgαy=  K, (2) где tgα x, tgα y - тангенсы углов направлений на излучающий источник соответственно в плоскостях XZ и YZ;
K, (2) где tgα x, tgα y - тангенсы углов направлений на излучающий источник соответственно в плоскостях XZ и YZ;
UI , UII
UIII, UIV - суммарные сигналы фоточувствительных элементов соотвественно первого-четвертого квадрантов;
К - масштабный коэффициент.
Вычисление пеленгов по формулам (1) и (2) поясняются на фиг. 3. Здесь лучи источника 7, проходя через растр линз 8 или многощелевую диафрагму 9, образуют в плоскости фотоприемника 10 многоэлементные изображения Е(х), представленные в диаграммах а и д соответственно.
Иллюстрируемый одномерный процесс измерения пеленга соответствует измерению положений Х элементарных изображений Е(х) вдоль координаты Х. Показанные на диаграммах (фиг. 3б, в, г, е, ж, з) функции фоточувствительности S1(x), S2(x), S1(x) - S2(x) образованы линейными комбинациями сигналов UI, UII, UIII, UIV - фотоприемного тракта, которые в свою очередь есть результаты интегрального преобразования сигнала изображения Е(х), т. е.
U1=  E(x) SI(x)dx, (3)
E(x) SI(x)dx, (3)
UII=  E(x) SII(x)dx, (4)
E(x) SII(x)dx, (4)
UIII=  E(x) SIII(x)dx, (5)
E(x) SIII(x)dx, (5)
UIV=  E(x) SIV(x)dx, (6) где SI, SII, SIII, SIV - функции фоточувствительности фотоприемника, реализуемые пространственным распределением элементов соответствующих квадрантов с учетом тракта усиления;
E(x) SIV(x)dx, (6) где SI, SII, SIII, SIV - функции фоточувствительности фотоприемника, реализуемые пространственным распределением элементов соответствующих квадрантов с учетом тракта усиления;
хмакс - размер приемной поверхности по координате Х.
Функци S1(x) и S2(x) выражаются следующим образом:
S1(x) = SI(x) + SII(x), (7)
S2(x) = SIII(x) + SIV(x). (8)
На фиг. 3д показана дискриминационная характеристика пеленгатора, т. е. зависимость напряжения U(xc), определяемого функцией фоточувствительности S1(x) - S2(x), от координаты Х положения изображения. Размеры участков нелинейности определяются в основном формой распределения освещенности изображения Е(х). Для изображений с высокой крутизной фронтов, формируемых многощелевой диафрагмой (фиг. 3д), эти участки имеют принебрежимо малые размеры. Для изображений с гауссовой формой (фиг. 3а) размеры участков нелинейности возрастают.
Значение масштабного коэффициента К в формулах (1), (2) также зависит от формы распределения освещенности изображения.
Для распределения освещенности изображения, формируемого многощелевой диафрагмой, при равенстве размеров щелей и размеров элементов приемника:
K = h/f, (9) где h - размер элементов приемника;
f - расстояние от плоскости щелевой диафрагмы до плоскости фотоприемника.
По сравнению с известным предлагаемый пеленгатор обладает повышенными точностью и быстродействием, уменьшенными габаритно-весовыми характеристиками. (56) Optocal Engineering, 1981, vol. 20, pp. 135-142.
Малашин М. С. и др. Основы проектирования лазерных локационных систем. - М. : Высшая школа, 1982, с. 152-155.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ КООРДИНАТЫ ИМПУЛЬСНОГО ТОЧЕЧНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ | 1985 |
|
SU1396783A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТЫ ИЗОБРАЖЕНИЯ ТОЧЕЧНОГО ИСТОЧНИКА | 1986 |
|
SU1485834A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ИЗОБРАЖЕНИЯ ТОЧЕЧНОГО ИСТОЧНИКА | 1986 |
|
SU1409013A1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2282128C1 |
| Оптоэлектронный анализатор | 1972 |
|
SU434843A1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2258887C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277688C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ БОЕПРИПАСОМ ОПТИЧЕСКОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИК-ПРИЕМНИКОМ | 2023 |
|
RU2822973C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
Изобретение касается оптической локации и может быть использовано для определения угловых координат источников излучения в системах оптической ориентации объектов, для реализации систем технического зрения роботов. Изобретение позволяет повысить точность и быстродействия при измерении пеленгов источников, а также снизить габаритно-весовые характеристики пеленгатора. Изобретение основано на взаимодействии многоэлементного изображения источника излучения, формируемого матрицей оптических систем 1 (растром линз или многоцелевой диафрагмой), с матрицей фоточувствительных ячеек 3, выполненной на одной полупроводниковой подложке. Каждая фотоячейка 4 представляет собой четырехквадрантный фотоприемник. Фоточувствительные элементы одноименных квадрантов всех ячеек матрицы параллельно соединены. Оптические оси матрицы оптических систем параллельны и совпадают с Z-осями матрицы фотоячеек. 3 з. п. ф-лы, 3 ил.