f- 7 /5 i А Фиг
Изобретение относится к сельскому хозяйству, в частности к кормораздатчикам.
Цель изобретения - гювьпиение надежности в работе.
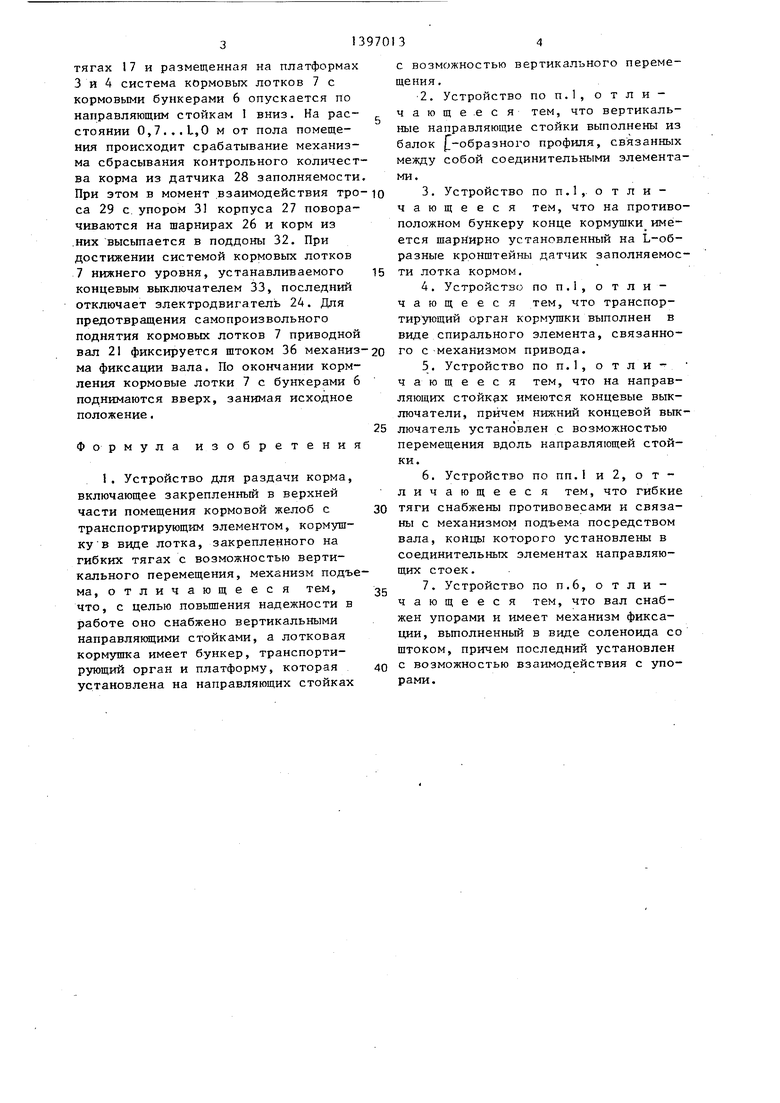
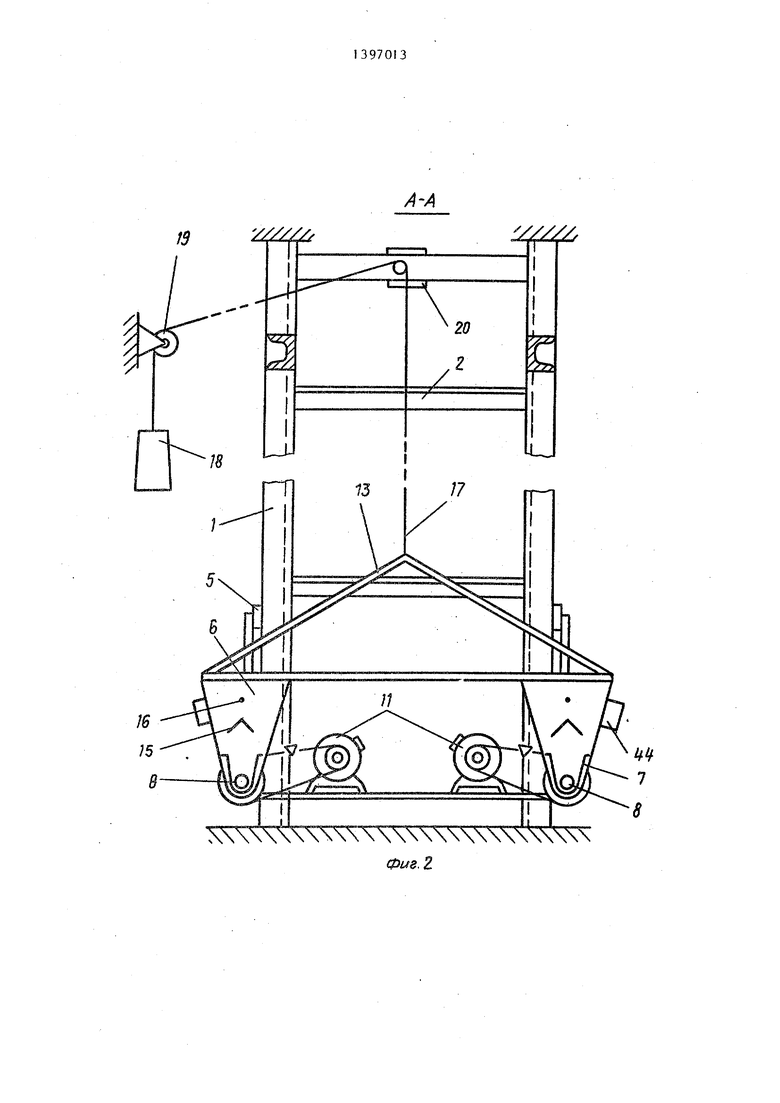
На фиг.1 изображено устройство для раздачи корма, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.3 то же, при поднятых кормовых лотках в период заполнения бункеров кормом; на фиг.4 - разрез Б-Б на фиг.1; на фиг.5 - узел I на фиг.4 (разрез кормового лотка); на фиг.6 - кормораз- дающее устройство, положение после окончания кормления; на фиг.7 - механизм сбрасывания контрольного количества корма из корпусов датчиков заполняемости лотков кормом, при нижнем положении кормового желоба; на
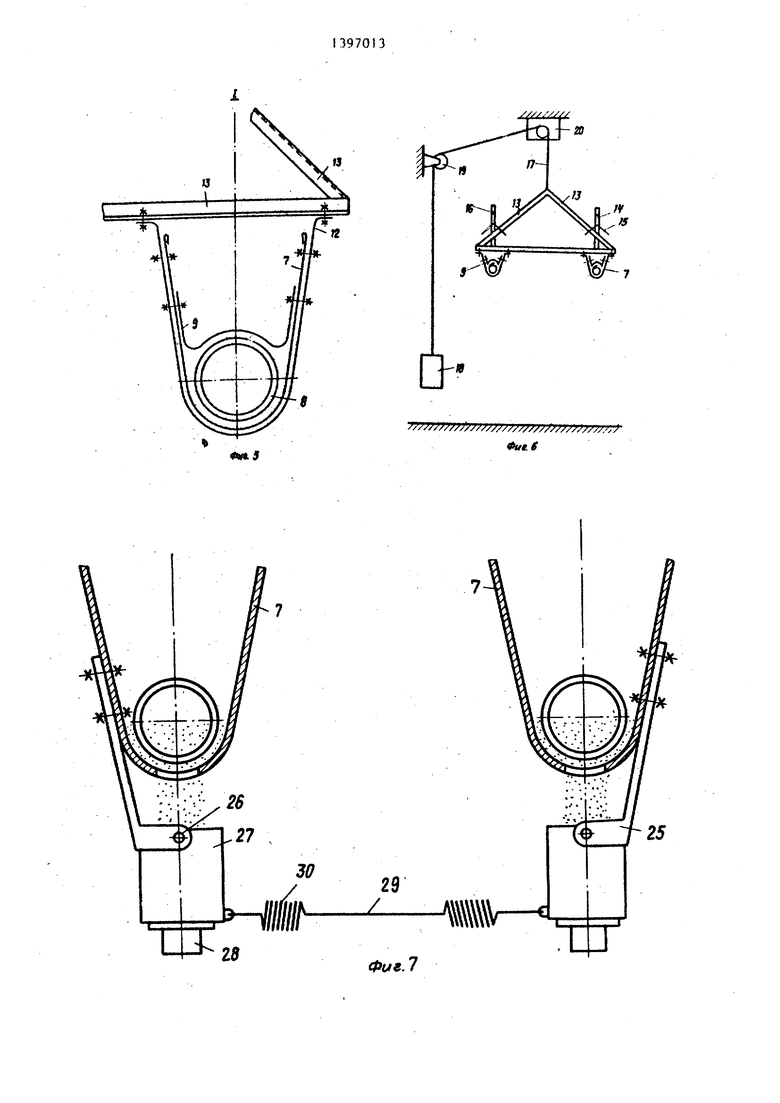
фиг.8 - то же, при нижнем положении кормовых лотков; на фиг.9 - устройство механизма фиксации вала привода. Устройство содержит направляющие стойки 1 5 выполненные из профиля образного сечения, например швеллера. Стойки соединены между собой поперечными элементами 2. На стойках 1 установлены передняя 3 и задняя 4 платформы, снабженные роликами 5 для перемещения по стойкам. На передней платформе 3 установлены кормораздаточные бункера 6, соединенные с лотками 7 кормушки. Внутри лотков 7 ус- тановлены спиральные транспортеры 8 и скобы 9, ограничивающие положение транспортеров. При этом спиральные транспортеры 8 связаны посредством клиноременной передачи с приводным механизмом, который состоит из шки- ВОВ 10 и электродвигателей 11. Кормовые лотки 7 соединены между собой посредством хомутов 12, которые крепятся к траверсе 13. На концах поперечных элементов траверс 13 закреп лены стойки 14 с ограждающим козырьком 15 и предохранительными элементами 16, выполненными в виде натянутой на стойки 14 проволки.
В местах соединения наклонньк эле ментов траверс 13 закреплены гибкие тяги 17 механизма подъема кормовых лотков 7. Указанный механизм выполнен в виде трособлочной системы с противовесами 18, состоящей из бло- ков 19, закрепленных на стене, и подшипниковых узлов 20, закрепленных к потолку и соединительным элементам направляющих стоек. В гюдтипннковых
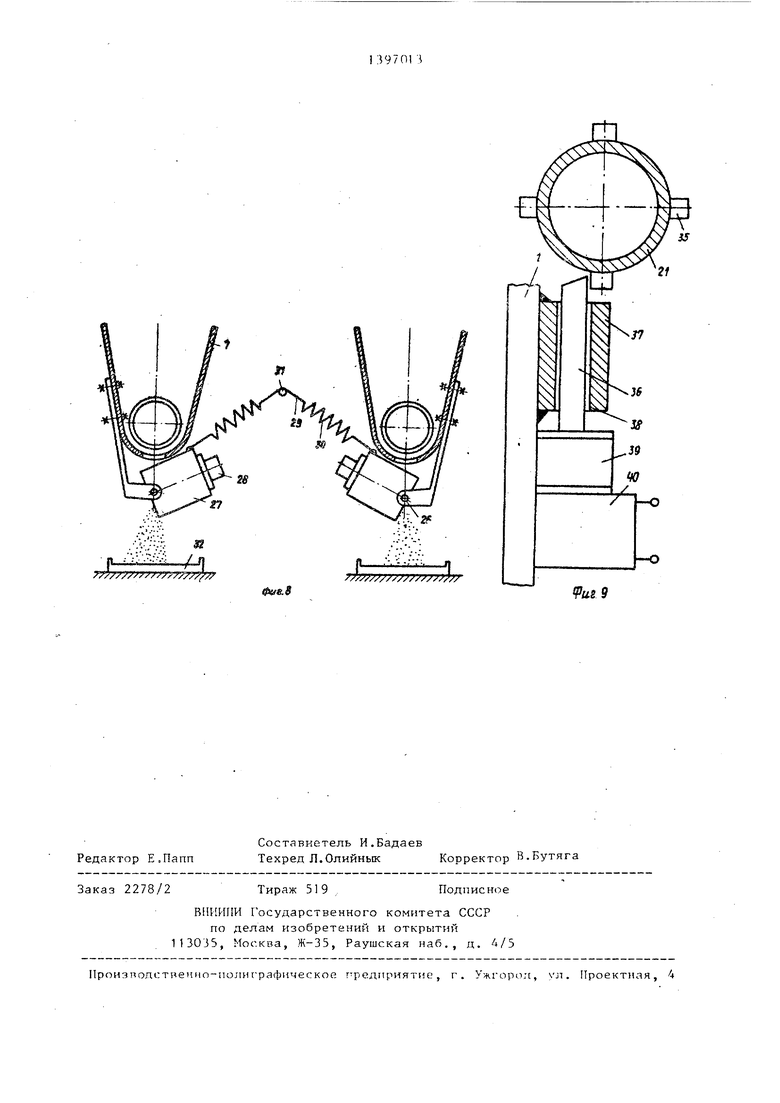
узллх 20 установлен приводной вал 21 связачный посредством муфты 22 с редуктором 23, а через клиноременную передачу - с электродвигателем 24. Тяги 17, идущие от траверс 13, которые закреплены к кормовым лоткам 7, крепятся непосредственно к валу 21. К остальным тягам 17 закреплены противовесы 8, причем указанные тяги имеют предварительную намотку на вал 21 для увеличения сцепления с валом. На боковых стенках кормовых лотков 7 в их конце установлены L-образные кронщтейны 25, к которым посредством шарнира 26 крепятся корпуса 27 датчиков 28 заполняемости, соединенных между собой тросом 29 с пружинами 30 При опущеных кормовых лотках 7 трос 29 находится в зацеплении с упором 31. При этом для сбора высыпавшегося из корпуса 27 датчика 28 заполняемости установлены поддоны 32.
На направляющих стойках 1 закреплены концевые выключатели нижнего 33 и верхнего 34 уровней, причем выключатель 33 установлен с возможностью перемещения вдоль стойки 1. Приводной вал 2 снабжен упорами 35, взаимодействующими со штоком 36 механизма 37 фиксации вала. Механизм фиксации вала состоит из направляющей втулки 38, закрепленной на стойке механизма 39 возврата, и соленоида 40. Для заполнения кормовых бункеров 6 имеется поперечный кормовой желоб 41 со шнеком 42 и выгрузными рукавами 43. Кормовые бункера 6 снабжены датчиками 44 уровня.
В режиме распределения корма устройство работает следующим образом.
В исходном положении кормовые лотки 7 подняты к кормовому желоб у 41, корм из которого через выгрузные рукава 43 поступает в кормовой бункер 6 до его заполнения, которое регистрируется датчиком 44 уровня. Сигналом от датчика 44 отключается привод шнека 42 и включаются электродвигатели 1I, которые приводят в движение спиральный транспортер 8 кормового лотка 7. Корм, перемещаемый транспортером 8, заполняет лоток 7 до попадания его в корпус 27 датчика 28 заполняемости, при срабатывании которых электродвигатели 11 отключаются. По команде с реле времени включается электродвиг атель 24, вращая приводной B. iji 21 , При этом /кщпешсипая на
тягах 17 и размещенная на платформах 3 и 4 система кормовых лотков 7 с кормовыми бункерами 6 опускается по направляющим стойкам 1 вниз. На расстоянии 0,7...L,0 м от пола помещения происходит срабатывание механизма сбрасывания контрольного количества корма из датчика 28 заполняемоети При этом в момент .взаимодействия троса 29 с. упором 31 корпуса 27 поворачиваются на шарнирах 26 и корм из .них высыпается в поддоны 32, При достижении системой кормовых лотков 7 нижнего уровня, устанавливаемого концевым выключателем 33, последний отключает электродвигатель 24. Для предотвращения самопроизвольного поднятия кормовых лотков 7 приводной
вал 21 фиксируется штоком 36 механиз-20 го с механизмом привода. ма фиксации вала. По окончании кормления кормовые лотки 7 с бункерами 6 поднимаются вверх, занимая исходное положение.
Формула изобретения
1. Устройство для раздачи корма, включающее закрепленный в верхней части помещения кормовой желоб с транспортирующим элементом, кормушку в виде лотка, закрепленного на гибких тягах с возможностью вертикального перемещения, механизм подъема, отличающееся тем, что, с целью повьппения надежности в работе оно снабжено вертикальными направляющими стойками, а лотковая кормушка имеет бункер, транспортирующий орган и платформу, которая установлена на направляющих стойках
5.Устройство по п., чающееся тем, что ляющих стойких имеются ко лючатели, причем нижний к
25 лючатель установлен с воз перемещения вдоль направл ки.
6.Устройство по ПП.1 личающеес я тем,
30 тяги снабжены противовеса ны с механизмом подъема п вала, концы которого уста соединительных элементах щих стоек.
7.Устройство по п.6, чающееся тем, что жен упорами и имеет механ ции, вьтолненный в виде с штоком, причем последний
40 с возможностью взаимодейс рами.
35
с возможностью вертикального перемещения.
2. Устройство по п,1, о т л и - чающе.еся тем, что вертикальные направляющие стойки выполнень: из балок | -образного профиля, связанных между собой соединительными элементами.
3. Устройство по п,1,. о т л и - чающееся тем, что на противоположном бункеру конце кормутики имеется шарнирно установленный на L,-o6- разные кронщтейны датчик заполняемос- ти лотка кормом.
А. Устройство по п.1, о т л и - чающееся тем, что транспортирующий орган кормушки выполнен в виде спирального элемента, связанного с механизмом привода.
5.Устройство по п., о тли- чающееся тем, что на направляющих стойких имеются концевые выключатели, причем нижний концевой выключатель установлен с возможностью перемещения вдоль направляющей стойки.
6.Устройство по ПП.1 и 2, о т - личающеес я тем, что гибкие
тяги снабжены противовесами и связаны с механизмом подъема посредством вала, концы которого установлены в соединительных элементах направляющих стоек.
7.Устройство по п.6, отличающееся тем, что вал снабжен упорами и имеет механизм фиксации, вьтолненный в виде соленоида со штоком, причем последний установлен
с возможностью взаимодействия с упорами.
У//Л
Е
rn
////Л
/
20
г
13
/7
| название | год | авторы | номер документа |
|---|---|---|---|
| Раздатчик кормов | 1975 |
|
SU587914A1 |
| Кормораздатчик | 1983 |
|
SU1138079A1 |
| Устройство для кормления телят в помещениях с двухрядным расположением стойл | 1975 |
|
SU606568A1 |
| Кормушка | 1978 |
|
SU908290A1 |
| Раздатчик кормов | 2024 |
|
RU2828441C1 |
| КОНВЕЙЕРНАЯ СИСТЕМА УНИВЕРСАЛЬНАЯ БЛОЧНО-ИНТЕГРАЛЬНО-СЕКЦИОННАЯ ЗООПЕРЕРАБАТЫВАЮЩАЯ | 2002 |
|
RU2239982C2 |
| Устройство для раздачи кормов | 1982 |
|
SU1115687A1 |
| Устройство для дозированного кормления животных | 1986 |
|
SU1442150A1 |
| Кормораздатчик | 1987 |
|
SU1442152A1 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ МНОГОКОМПОНЕНТНЫХ СМЕСЕЙ | 2012 |
|
RU2494658C1 |

VI
I
Фи8.2
fl
«М5
Х/ХУХХ/ХХ
/////// /////// / / /////jf// / /////} Фи.$
25
2В
Фие.7
L,,) :;;-,;)
- /XXxxVX/ XXX/ y / /x /V/
Редактор Е.Папп
Составиетель И.Бадаев
Техред Л.Олийнык Корректор В.Бутяга
Заказ 2278/2
Тираж 519
BilFiHIIH Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
35
21
fusS
Подписное
| ШТАММ КЛЕТОК ЯИЧНИКОВ КИТАЙСКОГО ХОМЯЧКА СНО-ЕРО 4А9 - ПРОДУЦЕНТ ВЫСОКОСИАЛИРОВАННОГО ЭРИТРОПОЭТИНА | 2016 |
|
RU2652884C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
