со со ю
ОР
tN3
Фиг.)
Изобретение относится к Maismno строительн;1Й промьшшенности, в частности к манипуляторам, предназначенным для выполнения вспомогательных операций, связанных с изменением положения заготовки, изделия, материалов в пространстве, и может быть использовано в автоматизированных линияхD
Целью изобретения является pacum- рение технологических возможностей за счет увеличения зоны обслуживания
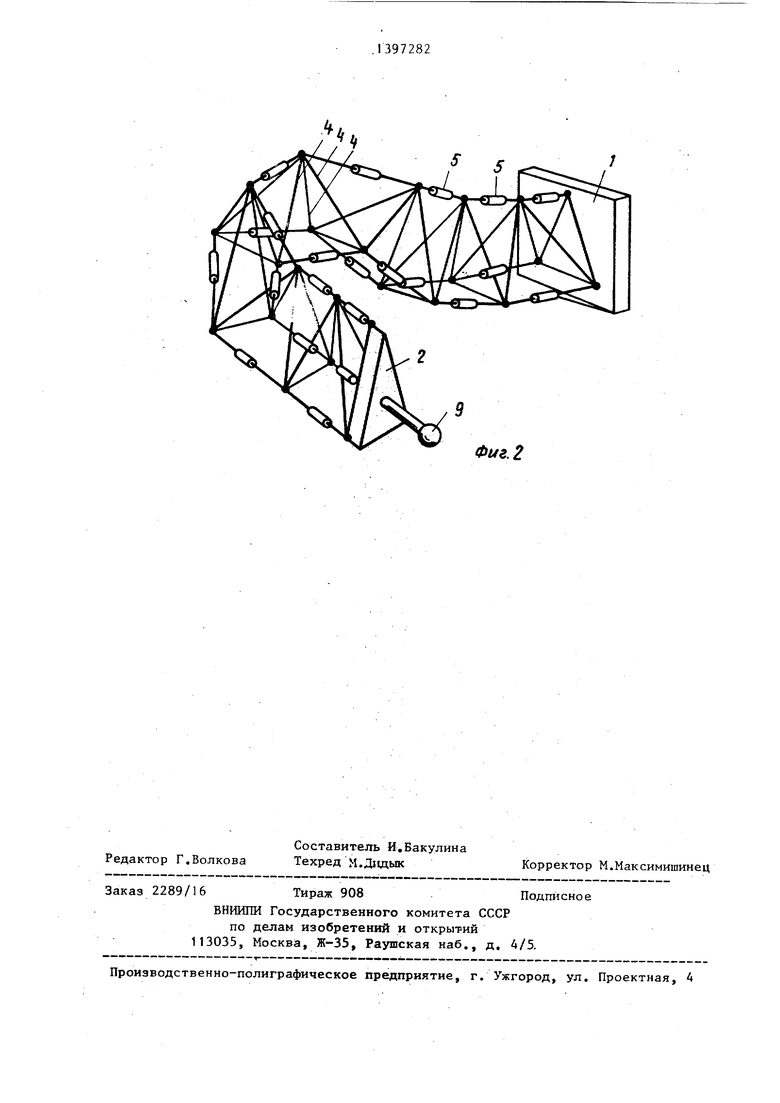
На фиг И изображен манипулятор, общий вид, в исходном положении; на фиг«2 - то же, в рабочем положениио
Манипулятор содержит начальнс. 1 и конечное 2 звенья, шарнирно C(e,и- ненные между собой объемной фермой« Объемная ферма образована основной плоской фермой 3 .с треугольной ре.- шеткой, составленной и шарн рно соединенных звеньев 4 и приво./;иБ 5 поступательного пере ещеник,, например силовых гидроциличдров, обр; тощих ее по, а, и аналогичнья--гл ..и дополни- тельНоЕМи плоски ш фермами 6 7, состав; энными также из шарчирнс сое-- динена ;1Х звеньев 4 и привс. гв 5 ступательного перемещения о При атом в основании объеммой фе- .ркы расположен треугольник Ребрами 8 объеиной фермы являются пояса основной плоской фермы 3 и дополнительных плоских фер- 6 и 7., Одна из граней., смежная с гг знью, образованной основной ппсский фирмой 3, образованная дополнительной плоской фермой 6, вьпюлне- на также с треугольной решеткой. Другая смежная . с ней грань, образе- ванная дополните:пьно плоской фермой 7, вьтопнёпа с четырехугольной решеткой,, На конечном звене 2 установлен рабочий инструмент 9.
Манипулятор работает следующим образом.
При выдвижении штока одного из силовых гидроцилиндров 5 осуществляется изгиб манипулятора и перемещение рабочего инструмента 9 в одну : сторону. При втягивании щтока силового гидроцилиндра 5. осуществляется изгиб манипулятора и перемещение рабочего инструмента 9 в другую сторону Работа одновременно группы силовых гидроцилиндров 5 устанавливает объемную ферму в определенное изогнутое положение, что позволяет переместить рабочий инструмент 9 в любую точку пространства в пределах полусферы радиусом, равным длине объемной фермы.
При этом манипулятор может обогнуть одно или несколько препятствий или доставить рабочий инструмент или изделие в труднодоступное место
Формула И сбретечия
Манип. лятор, /держащий к чальное и конзчкое ЕвеЫл я, соединенные между собой О KOiJi ой плоской фермой с тре- уг:.)ль 1сй )°г г ткоЙ5, составленной из атаргглрио с- о ыненны звеньев и приводов поступательного леремещения, образуюш 1х ее пояса, о т л и ч а root и и с я тем, что, с целью расщи- рения технологических возможностей за счет увеличения зоны обслуживания он снабжен аналогичными дополнительными плоскими фермами, образующими между собой и с основной плоской фермой объемную ферму, в основании которой расположен треугольник, ребрами объемной фермы являются пояса основной и дополнительной плоских ферм, при этом одна из ее смежных
граней выполнена также с треугольной решеткой, а другая - с четырехугольной решеткой.
Фиг. 2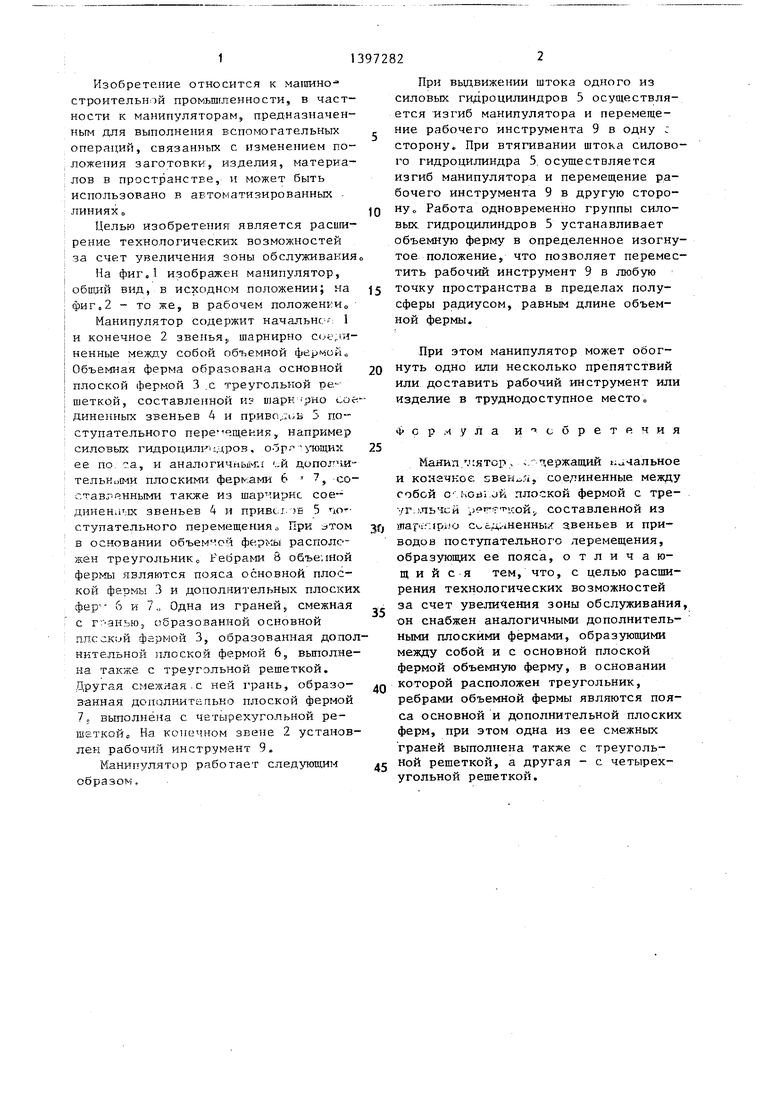
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1980 |
|
SU889417A1 |
| ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2001 |
|
RU2197586C1 |
| ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2001 |
|
RU2204672C2 |
| ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2006 |
|
RU2307907C1 |
| ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2006 |
|
RU2303113C1 |
| ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2006 |
|
RU2303112C1 |
| ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2001 |
|
RU2197587C1 |
| Строительный решетчатый элемент | 1990 |
|
SU1760043A1 |
| УНИВЕРСАЛЬНОЕ ЗДАНИЕ | 2016 |
|
RU2631285C1 |
| Кран-манипулятор | 2024 |
|
RU2823660C1 |
Изобретение относится к машиностроительной промьппленности, в частности к манипуляторам, предназначенным для выполнения вспомогательных операций, связанных с изменением положения заготовки изделия, материалов в пространстве, и может быть использовано в автоматизированных изводственных линиях. Целью изобретения является расширение технологических возможностей за счет расширения зоны мaнипvлиpoвaния, Манипулятор содержит начальное 1 и конечное 2 звенья, шарнирно соединенные между собой o6beNffloA фермойо Объемная ферма образована основной плоской фермой 3 с треуголт.ной решеткой, составленной из шарнирно соединеннЕЖ звеньер и приводов поступательного перемещения 5, образующих ее пояса, и аналогичными ей дополнительными плоскими формами 6 и 7, Дополнительные плоские фермы 6 и 7 составелены также из шарнирно соед шенных звеньев 4 и приводов 5 поступательного перемещения В основании объемной фермы расположен треугольник. Ребрами 8 объемной фермы являются пояса основной плоской фермы 3 и дополнительных плоских ферм 6 и 7„ Грань фермы, образованная дополнительной плоской фермой 7, выполнена с треугольной решеткой. 2 ил. I (Л
| Исполнительный орган манипулятора | 1980 |
|
SU889417A1 |
