со со со
о
О5
NU
Изобретение относится к машиностроению и может быть использовано при создании роботизированных комплексов для автоматизации процессов загрузки деталей и является усовершенствованием устройства по авт. св. № 1013196.
Целью изобретения является расширение возможностей устройства за счет расширения номенклатуры ориентируемых деталей, например возможности ориентирования деталей с частично прозрачными донышками.
На чертеже представлена блок-схема устройства.
Устройство содержит манипулятор 1 загрузки деталей 2 и манипулятор 3 выгрузки их из лотка 4. Манипуляторы 1 и 3 выполнены, например, в виде электромагнитов или воздушных присосок или механических захватов. Блок распознавания содержит лоток 4, на дне которого установлен рецепторный фотодатчик, включающий два наклонно установленных навстречу один другому в дне лотка светодиода 5 и расположенного между ними фотодиода 6. Оси светодиодов 5 и фотодиода 6 расположены в одной плоскости. Светодиоды 5 соединены параллельно. Командоаппа- рат содержит датчики сигналов 7 Считывание, 8 Сброс, 9 Исполнение, которые выполнены в виде соосно расположенных фотодиода и светодиода и управляются с помощью металлических флажков 10-12 соответственно, жестко укрепленных на валу командоаппарата, связанного кинематически передачей 13 с электроприводом 14.
Блок 15 управления ориентацией выполнен в виде последовательно соединенных предварительного усилителя 16 элемента И 17, триггера 18, выход которого соединен со своим свободным входом через второй элемент И 19, третьего элемента И 20, усилителя 21 мощности.
Кантователь содержит две взаимно перпендикулярные зубчать е рейки, одна из которых 22 совершает возврат но-поступательное перемещение по дну лотка 4, а другая 23 - по стенке лотка 4 от зубчатой шестерни-вала 24, приводимой в движение электроприводом 25. Вертикальная рейка 23 под- пружинена пружиной 26, которая обеспечивает возврат механизма перемещения в исходное положение.
10
15
20
25
30
,
3990642
Горизонтальная рейка 22 имеет вырез в средней части, обеспечивающий постоянно открытое положение рецеп- торного фотодатчика.
Изгиб стенок 27 лотка 4 обеспечивает надежное попадание детали в лоток.
Блок управления 28 режимом работы светодиодов 5 блока распознавания выполнен в виде последовательно соединенных генератора импульсов 29, трехвходового элемента И 30, ключа транзисторного 31.
Устройство работает следующим образом.
В исходном состоянии металлические флажки 10-12 выведены из датчиков 7-9. Светодиоды 5 блока распоз- навания выключены, так как элемент И 30 заперт нулевым уровнем напряжения с выхода датчика 7 Считывание. Импульсное напряжение генератора 29 с первого входа элемента И 30 не передается на вход ключа 31, который также заперт нулевым уровнем напряжения с выхода элемента И 30. Ток через Светодиоды 5 блока распознавания не проходит и их световое излучение отсутствует. Напряжение с уровнем логической единицы устанавливается на инвертирующем выходе, а с уровнем логического нуля - на прямом выходе триггера 18. Манипулятор 1 загрузки начинает загружать деталь 2 в лоток 4. После манипуляции загрузки электропривод 14 выводит из лотка 4 манипулятор 1 загрузки и вводит металлический флажок 10 в полость датчика 7 Считьшание, на выходе которого появляется напряжение с уровнем логической единицы.
Этот сигнал обеспечивает прохождение сигналов с усилителя 16 через элемент И 17 на триггер 18, а также импульсов генератора 29 через элемент И 30 на ключ 31, который откры35
40
45
вается, и через Светодиоды 5 протекает импульсный ток, вызьшающий импульсное световое изл -чение. Так как ток импульсный, то мощность световог излучения в импульсе может быть значительно увеличена по сравнению с мощностью непрерывного излучения. Световой поток и освещенность детали в импульсе повышается. Если дно детали частично прозрачно, то noBi.mie- ние мощности падающего на распознаваемую поверхность излучения обеспечивает сохране 1ие достаточного уровня освещенности в отраженном свете на поверхности приемного фотодиода 6.
Детали в лотке могут оказаться донышками вверх или вниз. Если деталь 2 окажется расположенной доньпп- кзми вверх, то первый импульс светового излучения двух светодиодов 5 попадает в донышко детали и отражается в фотодиод 6, Фототок усиливается усилителем 16. Импульс напряжения с выхода усилителя 16 попадает на элемент И 17, переключает триггер
тическую передачу 13 начинает перемещать манипулятор 3 выгрузки к лотку и выгружает деталь 2 из лотка. После этого флажок 12 выходит из полости датчика 9 Исполнение, который отменяет выработку команды Исполнение. Единичный сигнал триггера 18 ке проходит через элемент И 20, усилитель 21 мощности прекращает прохождение электрического тока через привод 25, Упругий элемент возвращает рейки 22 и 23 в исходное состояние. Одновременно металлический флажок 11 вво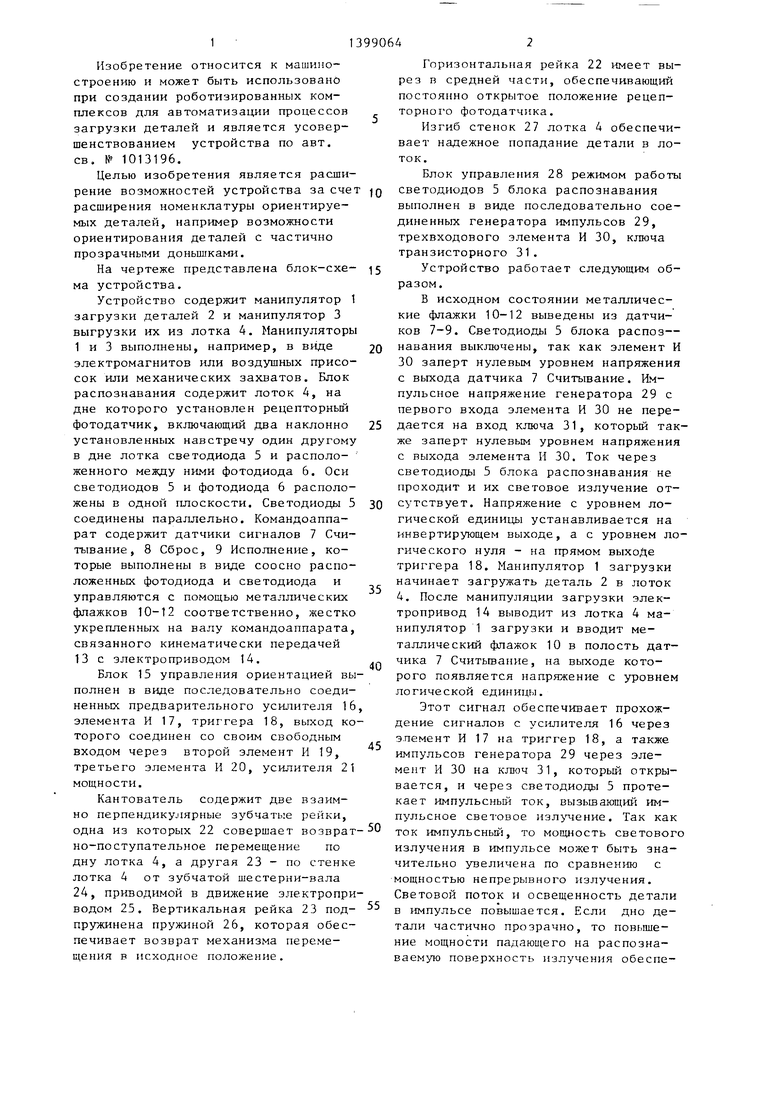
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации деталей | 1982 |
|
SU1013196A1 |
| Телевизионное ориентирующее устройство | 1985 |
|
SU1298956A1 |
| Устройство для измерения фазы и частоты вала дебалансного возбудителя колебаний | 1980 |
|
SU943664A1 |
| КАРДИОЛОГИЧЕСКИЙ МАГНИТОЛАЗЕРНЫЙ ТЕРАПЕВТИЧЕСКИЙ АППАРАТ | 1991 |
|
RU2022574C1 |
| ФОТОРЕГИСТРАТОР ДВИЖУЩЕЙСЯ МЕТКИ | 1998 |
|
RU2179304C2 |
| Способ передачи информации с использованием ультрафиолетового диапазона | 2020 |
|
RU2753382C1 |
| Устройство для определения дисбаланса роторов | 1986 |
|
SU1392413A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ОПРЕДЕЛЕНИЯ МЕТКИ НА ДИСКЕ ИНДУКЦИОННОГО ЭЛЕКТРОСЧЕТЧИКА | 1992 |
|
RU2010161C1 |
| Устройство для односторонней доводки деталей | 1987 |
|
SU1463452A2 |
| Автомат для контроля и разбраковки деталей | 1987 |
|
SU1470363A1 |

Изобретение относится к машиностроению и может быть использовано для автоматизации процессов загрузки деталей. Целью изобретения является расширение технологических возможностей устройства за счет расширения номенклатуры ориентируемых деталей. Для этого в устройство, содержащее манипуляторы загрузки и выгрузки деталей, командоаппарат с датчиками положения, блок распознавания и блок управления ориентацией дополнительно введен блок управления режимом работь светодиодов блока распознавания, связанньй с соответствующим датчиком командоаппарата, с блоком управления ориентации и с параллельно включенными светодиодами, к которым подводится импульсный сигнал, вызывающий их импульсное свечение. Это позволяет по высить мощность излучения светодиодов и освещенность детали при уменьшении длительности работы светодиодов. Если деталь имеет поверхность с низкими отражающими свойствами, то применяемый режим работы светодиодов тем не менее позволяет получить достаточный уровень светового сигнала, принимаемого фотоприемником блока распознавания. 1 ил. (Л
Выступы на краях реек обеспечивают синхронное поднимание левого края детали 2 и перемещение в левую сторону всего корпуса детали 2, Деталь 2 переворачивается из положения доньшком вверх в положение донышком вниз. В это время привод 14 через кинема
5
0
5
0
5
0
5
рез элемент И 19 сигнал Сброс с выхода триггера 18 обеспечивает переключение триггера 18 в исходное состояние. Система оказывается готовой к новому циклу работы.
Если деталь 2 загружается в лоток 4 доньщ1ком вниз, то импульсное световое излучение светодиодов 5 не поступает в фотодиод 6. Фотопоток отсутствует и на выходе усилителя 16 сигнала не будет. Триггер 18, усилитель 21 мощности, привод 25 и кантователь остаются в исходном состоянии. Сигналы с датчиков 7 - 9 не проходят через элементы И 17, 19 и 20. Электропривод 14 через кинематическую передачу 13 перемещают манипулятор 3 выгрузки детали 2 на другую технологическую позицию в правильно сориентированном положении. На инвертирующем выходе триггера 18 сохраняется напряжение с уровнем логической единицы, которое разрещает прохождение импульсов генератора 29 на светодиоды 5 блока распознавания. В этом случае светодиоды 5 работают в импульсном режиме все время измерения, определяемое временем включения датчика 7 Считывание. Этот режим обеспечивает уменьшение времени нахождения светодиодов в состоянии излучения и обеспечивает условия для повышения мощности излучения светодиодов 5 по сравнению с непрерьшным режимом излучения света.
Формула изобретения
Устройство для ориентации деталей по авт. св. № 1013196, отличающееся тем, что, с целью расширения технологических возможностей, оно дополнительно содержит блок управления режимом работы светодиодов
блока распознавания, включающий в себя последовательно соединенные генератор импульсов, трехвходовой элемент И и ключ, при этом второй вход элемента И соединен с выходом датчика сигнала Считьшание командоаппараа L2J
та, третий вход элемента Н соединен с инвертирующим выходом триггера блока управления ориентацией, а параллельно включенные светодиоды блока распознавания подключены к источнику питания через ключ.
| Устройство для ориентации деталей | 1982 |
|
SU1013196A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
