Изобретение относится к технологическим процессам ориентации деталей и предназначено для использования в установках автоматической загрузки деталей с неявно выраженным профилем (с глухими отверстиями), типа плоских корпусов и крышек ИС и БИС.
Известно устройство для ориентации деталей, содержащее манипуляторы загрузки и выгрузки деталей, командоаппарат с датчиками положения манипуляторов, блок распозпавания 1.
Недостатком известного устройства является низкая точность ориентирования деталей.
Целью изобретения является повышение точности устройства.
Поставленная цель достигается тем, что устройство для ориентации деталей, содержащее манипуляторы загрузки и выгрузки деталей, командоаппарат с датчиками положения манипуляторов, блок распознавания, снабжено блоком управления, выполненным в виде соединенных последовательно усилителя, схемы И, триггера, выход которого соединен со своим свободным входом через вторую схему И, и усилителя мощности., причем свободные входы схем И связаны с соответствующими датчиками командоаппарата, кантователем, связанным через блок управления с блоком распознавания.
Блок распознавания выполнен в виде лотка, на дне которогб установлен рецепторный фотодатчик, выполненный в виде двух светодиодов и фотодиода, связанного с входом усилителя блока управления, причем оптические оси светодиодов и фотодиода расположены под углом друг к другу.
Кантователь выполнен в виде двух взаимно перпендикулярных зубчатых реек с упорами на концах, кинематически связанных с шестерней, приводимой в движение от привода, соединенного с усилителем мощности блока управления.
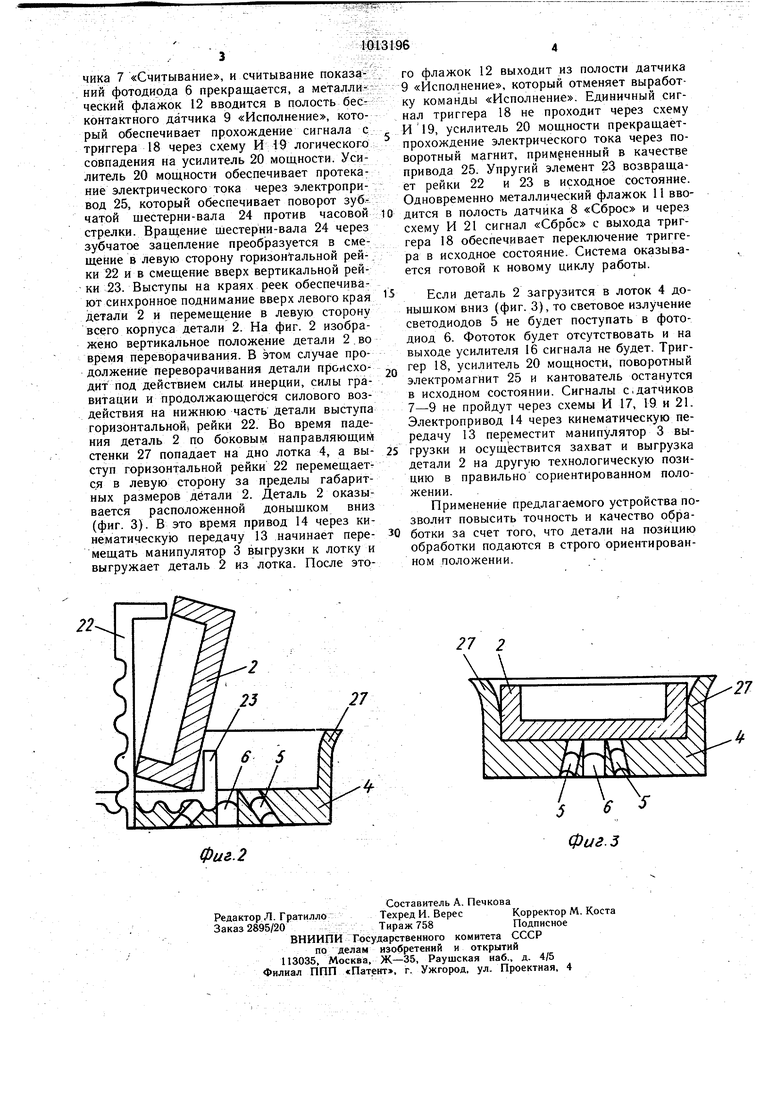
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - момент переворачивания детали; на фиг. 3-расположение детали в лотке в момент распознавания состояния детали донышком вниз.
Устройство содержит манипулятор 1 загрузки деталей 2 и манипулятор 3 выгрузки их из лотка 4. Манипуляторы 1 и 3 выполнены, например, в виде электромагнитов или воздушных присосок, или механических захватов. Лоток 4 снабжен рецепторным фотодатчиком. Он содержит два наклонно установленных навстречу друг к другу в дне лотка светодиода 5 и расположенного между ними фотодиода 6, причем оси светодиодов 5 и фотодиода 6 расположены в одной плоскости.
Командоаппарат содержит датчики сигналов «Считывание 7, «Сброс 8, «Исполнение 9, которые выполнены в виде соосно
расположенных фотодиода и светодиода и управляются с помощью металлических флажков 10-12 соответственно, жестко укрепленных на валу командоаппарата, связанного кинематической передачей 13 с электроприводом 14.
Устройство 15 управления предназначено для управления процессом переворачивания неверно сориентированных деталей и выполнено в виде последовательно соединенных предварительного усилителя 16, схемы И 17, триггера 18, выход которого соединен со своим свободным входом через вторую схему И, .третьей схемы И 19 и усилителя 20 мощности.
Выход датчика .7 «Считывание соединен с другим входом схемы И 17, выход датчика 8 соединен с другим входом схемы И 21, а выход датчика 9 соединен с другим входом схемы И 19. Выход фотодиода 6 рецепторного фотодатчика соединен с входом предварительного усилителя 16 схемы 15 управления.
Устройство переворачивания содержит две взаимно перпендикулярные зубчатые рейки, одна из которых 22 совершает возвратно-поступательное перемещение по дну лотка 4, а другая 23 - по стенке лотка 4 от зубчатой шестерни 24, приводимой в движение электроприводом 25, по сигналу с усилителя 20. Вертикальная рейка 23 подпружинена пружиной 26, которая обеспечивает возврат механизма перемещения в исходное положение. Горизонтальная рейка 22 имеет-вырез в средней части, обеспечивающий постоянно открытое положение рецепторного фотодатчика.
Изгиб стенок 27 лотка 4 обеспечивает надежное попадание детали в лоток.
Устройство для ориентации деталей работает следующим образом.
В исходном состоянии металлические флажки 10-12 выведены из датч1у(ов 7-9. Манипулятор 1 загрузки начинает загружать деталь 2 в лоток 4. Детали в лотке могут оказаться донышком вверх или вниз.
Если деталь 2 окажется расположенной донышком вверх (фиг. 1), то световое излучение двух светодиодов 5 попадает в донышко детали и отражается в фотодиод 6. Фототок усиливается предварительным усилителем 16 и попадает на схему И 17. логического совпадения. В это время электропривод 14 выводит из лотка 4 манипулятор 1 загрузки, а- металлический флажок 10 вводится в бесконтактный датчик 7 «Считывание, который обеспечивает прохождение сигнала с усилителя 16 через схему И 17 логического совпадения на триггер
18. Триггер 18 переключается, и единичный сигнал подается на входы двух схем И 19 и 21 логического совпадения. В этот момент металлический флажок 10 выводится из дат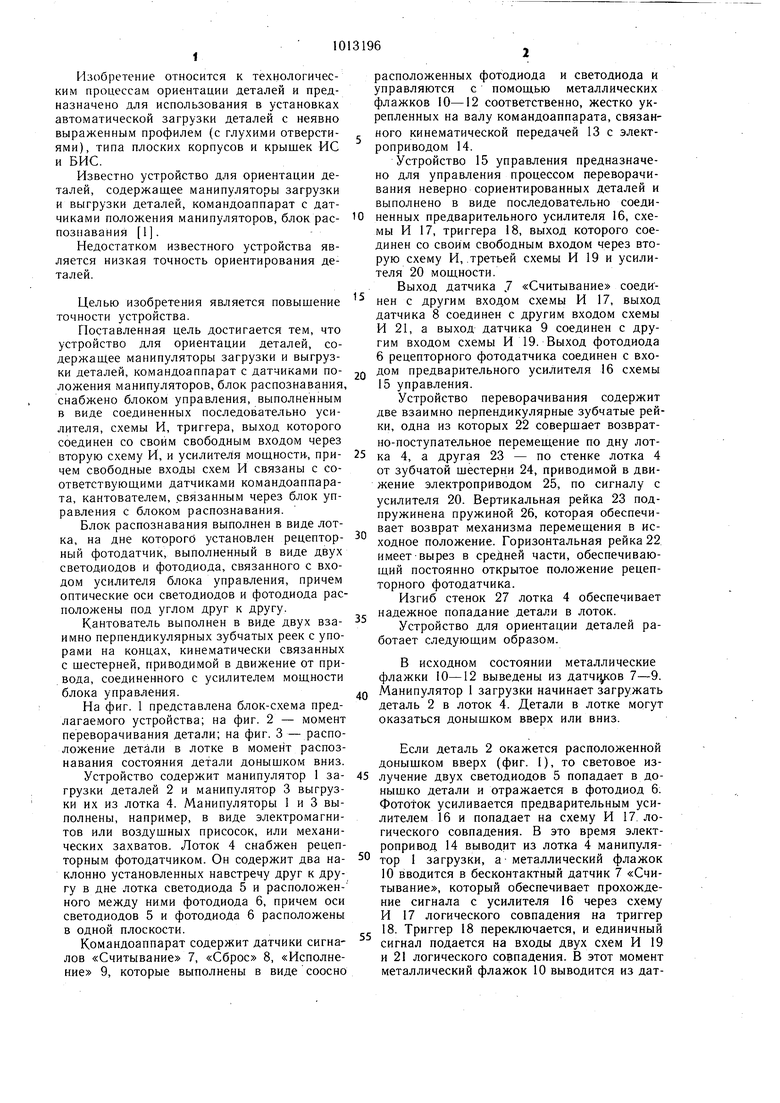
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации деталей | 1986 |
|
SU1399064A2 |
| Телевизионное ориентирующее устройство | 1985 |
|
SU1298956A1 |
| АВТООПЕРАТОРНАЯ ГАЛЬВАНИЧЕСКАЯ ЛИНИЯ | 1990 |
|
RU2013472C1 |
| Устройство для кассетирования плоских деталей | 1988 |
|
SU1618578A1 |
| Устройство для сортировки деталей | 1990 |
|
SU1801621A1 |
| Устройство для управления механизмом подачи изделий в зону обработки | 1987 |
|
SU1454768A1 |
| Устройство для ориентации деталей | 1989 |
|
SU1710289A1 |
| Кантователь | 1985 |
|
SU1349957A1 |
| АВТООПЕРАТОРНАЯ ГАЛЬВАНИЧЕСКАЯ ЛИНИЯ | 1989 |
|
RU1816003C |
| Устройство для загрузки изделий, преимущественно оснований корпусов интегральных схем, в кассеты | 1989 |
|
SU1762431A1 |
1. УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ДЕТАЛЕЙ, содержащее манипуляторы загрузки и выгрузки деталей, командоаппарат с датчиками положения манипуляторов, блок распознавания, отличающееся тем, что, с целью повышения точности ориентирования, устройство снабжено блоком управления, выполненным в виде соединенных последовательно усилителя, схемы И, триггера, выход которого соединен со своим свободным входом через вторую схему И, и усилителя мощности, причем свободные входы схем И связаны с соответствующими датчиками командоаппарата, кантователем, связанным через блок управления с блоком распознавания. 2.Устройство по п. 1, отличающееся тем, что блок распознавания выполнен в виде лотка, на дне которого установлен рецепторный фотодатчик, выполненный в виде двух светодиодов и фотодиода, связанного с входом усилителя блока управления, причем оптические оси светодиодов и фотодиода расположены под углом друг к другу. 3.Устройство по п. 1, отличающееся тем, что кантователь выполнен в виде двух взаимно перпендикулярных зубчатых реек с упорами на концах,- кинематически связанных с шестерней, приводимой в движение от привода, соединенного с усилителем мощности блока управления. U/d г г ип nUn nUn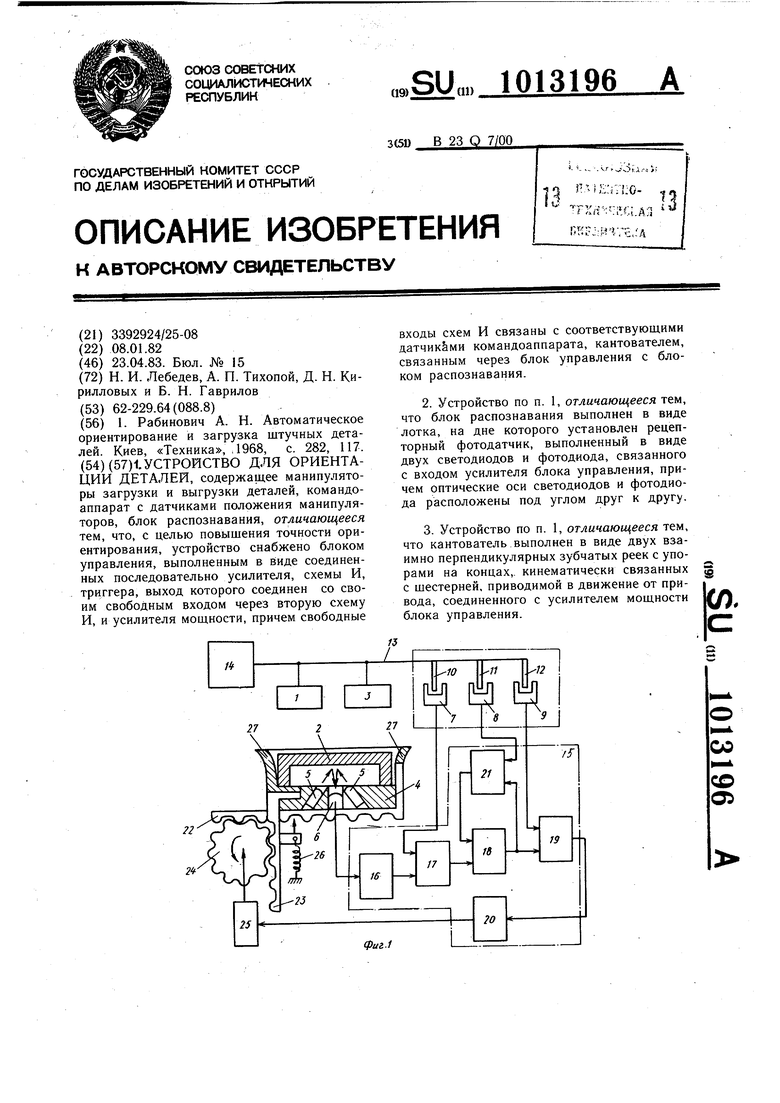
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рабинович А | |||
| Н | |||
| Автоматическое ориентирование и загрузка штучных деталей | |||
| Киев, «Техника, .1968, с | |||
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1916 |
|
SU282A1 |
