00 tsd
Изобретение относится к электротехнике и предназначено для использования в устройствах для контроля и защиты систем управления тиристор- ными преобразователями„
Цель изобретения - повышение на-- дежности контроля системы управления тиристорными преобразователями,,
На .фига 1 изображена структурная схема устройства для контроля системы управления преобразователем, реализующего предлагаемый способj на фиг, 2 - временные диаграммы работы структурной схемы на фиг. 3 - временные диаграммы для определения длительности интервалов между импульсами управления.
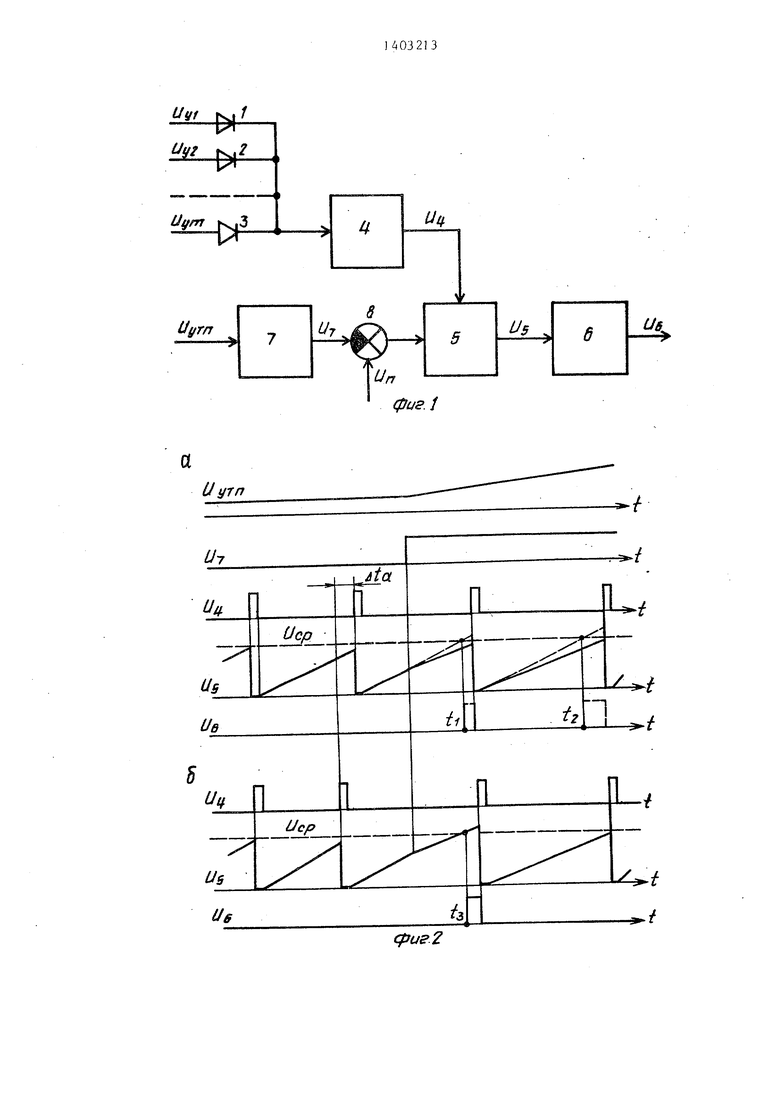
Устройство, реализующее предлагаемый способ, содерт-1т развязывающие диоды 1-3, формирователь 4 сигнала сброса, интегратор 5 с переключателем сброса, релейный элемент 6 диференцирующее звено 7,, суммирующий элемент 8. На аноды развязывающих диодов 1-3 подаются напрялсения импульсов управления Uy.. Катоды развязывающих диодов 1-3 подключены к входу формирователя 4 сигнала сброса выход которого подключен к переключателю сброса интегратора 5„ Выход интегратора подключен к входу релейного элемента 6, на выходе последнего формируется сигнал неисправности преобразователя. На вход дифференцирующего звена 7 подается напряжение управления преобразователя U а выход звена 7 подключен к первому входу суммирующего элемента Sj HSI второй вход которого подается постоянное напряжение Uf, , Результирующий сигнал с суммирующего элемента 8 подается на вход интегратора 5„
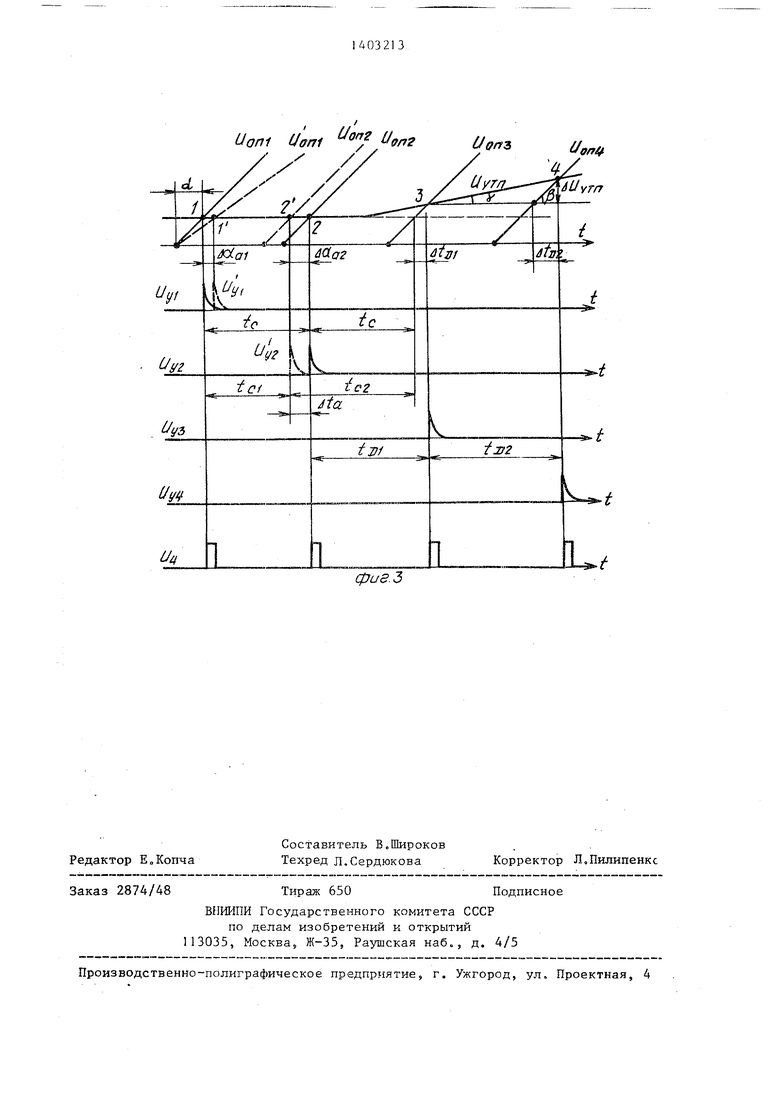
На временных диаграммах поясняющих работу структурной схемы устрой- ства контроля (фиг. 2),, изображены напряжения управления тиристорного преобразователя U п s выходное напряжение дифференцирующего звена U, выходное напряжение формирователя сигнала сброса ll,, выходное напряже;; ние интегратора 3, выходное напряжение релейного элемента 6. На фиг, 3 приведены временные диаграммы работы структурной схемы, объясняющие деистВИЯ первой производной напряжения и.(гп , и диаграммы работы, объясняющие срабатывание релейного элемента
0
5
0
5
при наличии асимметрии импульсов управления.
На временньЕх диаграммах для определения длительности интервалов между импульсами (фиг, 3) приведены пилообразные опорные напряжения для четырех каналов системы импульс- но-фазового управления тиристорного преобразователя U on напряжение управления тиристор-преобразователя , напряжения импульсов управления тиристорами Uy,-Uy4 выходное напряжение формирователя сигнала сброса U4. Пунктирными линиями вьщелены пилообразные опорные напряжения с различным наклоном ,, и различной синхронизацией начала пилы Uflp , которые вносят асимметрию по углу импульсов управления Ле/с,, и соответственно. Длительность- интервалов между импульсами управления отмечена в статике t и динамике tjj Интервалы в динамике отлича ются от статистических на величину 4tj). Асимметрия угла управления /Jofot приводит к изменению длительности интервалов между импульсами управления в статике t
и t
са
на величи0
0
5 0
ну 4tc.
Время ме/кду импульсами при работе тиристорного преобразователя определяется точками пересечения опорного напряжения.Don и напряжения уп- равления преобразователя U утл Сфиг 3). При неизменном во времени Vутп (статический режим работы ТП) и симметричном опорном напряжении во всех каналах управления время между импульсами управления тиристо- рйми постоянно и равно
tc 1/(fcm), (1) где f частота питающей сети
га - число пульсаций выпрямленного напряжения
Асимметрия между импульсами уп равления возникает от опорного на- п.ряжения из-за различного наклона (и рп) или неточной синхронизации начала опорного напряжения (,). При угле асимметрии 710 эл, град, колебания выпрямленного напряжения превышают 17% от максимального выпрямленного, что приводит к колебаниям выпрямленного тока, неустойчивой работе преобразователя, неравномерной загрузке тиристоров по току, На практике допустимой считается Лс(я 5 эл. град. Время между нмпульсами за счет асимметрии равно
too. t t tq , (2)
где ut временная асиммет- рия импульсов.
При изменяющемся напряжении управления (динамический режим работы) время между импульсами управления зависит от характера изменения во времени. Для повышения помехоза- щищенности на входе системы импульс- но-фазового управления преобразователя устанавливается фильтр с постоянной времени Т,. При произвольном входном сигнале напряжение управления U,(f, , сравниваемое с опорным, имеет ограниченную скорость изменения во времени. При скачкообразном входном сигнале время переходного процесса для пп ЗТ, что соответствует для трехфазной мостовой схемы 5-9 выпрямления пульсациям выпрямленного напряжения, Тое, на интервале времени между двумя импуль сами управления напряжение управления преобразователя можно считать изменяющимся по линейному закону:
UVTP (t) UVTHO + К t, (3) где Ку диутп /tpi tg;j
Для опорного напряжения справедливо вьфажение
Uon(t) Kp t (4) где К iU vTfi /At jj5 tg/J.
Время между импульсами
tDa tc+ &t 21, (5)
Совместно решая уравнения- (1) - (5), находим зависимость
, . (6) по которой видно, что время между импульсами управления в динамике зависит от Скорости изменения напряжения управления К.,,
Пропадание импульса управления при неисправной работе системы управ ления преобразователя приводит к увеличению времени между импульсами на величину tc.
Таким образом, с учетом уравнений (1), (2) и (6) в общем случае максимальное время между импульсами равно
tw ()+at«+tcJ, (7) причем два последних слагаемых появляются при асимметрии импульсов и пропадании одного из них.
Для проверки длительности интервалов между импульсами управления эти импульсы через развязывающие диоды
1-3 (фиг. 1) подают на вход формирователя 4 сброса, выходной сигнал которого в виде импульсов подается на переключатель сброса интегратора 5. В статике, когда напряжение управления преобразователя не изменяется во времени, а его первая производная по времени ofUy-rn/° t О, на вход интегратора 5 поступает постоянное напряжение „, а максимальный выходной сигнал интегратора
м 1
т,
и
f Г S пгде Т - постоянная времени интегрирования интегратора, cj t - длительность интервала между двумя импульсами управления, с.
При отсутствии асимметрии и наличии всех импульсов управления
t tc
,Un/(4m.T).
Выходное напряжение интегратора поступает на вход релейного элемента 6, для которого напряжение сраба- бывания Ucp Ujj. , и на вькоде релейного элемента не формируется сигнал неисправности.
Таким образом, интегратор 5 совместно с релейным элементом 6 осуществляют сравнение интервала времени между импульсами управления с заданным интервалом времени, который определяется темпом нарастания выходного напряжения интегратора 5 и порогом срабатывания релейного элемента 6,
Формирование сигнала неисправности при исчезновении импульсов управления или их асимметрии происходит за счет того, что согласно (7) с„ 7 tj- и максимальное выходное напряжение интегратора
Uj Un(te+ tc,)/TH 7/ UCP превысит напряжение срабатьшания репейного элемента 6. I
Для повышения надежности контроля работы преобразователя напряжение управления U через дифференцирующее звено 7 подается на суммирующий элемент 8, суммируется с постоянным напряжением Up и поступает на вход интегратора 5.
Входное напряжение интегратора 5
п-Та -cJUy Jdt,
где Т , постоянная времени дифференцирующего звена 7. Интегратор 5 за время между импульсами управления t, интегрирует входной сигнал Ug и максимальная величина выходного сигнала интегратора
tH
п - t Пт -т -iHll - 1 1UfT - f: ыГ (8)
в динамике
dUvrn/clt Ку,
а максимум выходного сигнала интегратора 5 с учетом (6) и (8) равен
КеСуп-Т К.) 51 Т JetnlK -K) ..
(9)
Если выбрать постоянную величину времени дифференцирующего.звена 7 из условия
.Т .ип/К|ь ,(10)
то
UffB Use Un/(fcm Ty) ,
Таким образом, в динамике за счет корректирующего сигнала по первой производной напряжения управления во времени при выборе постоянной вре мени дифференцирующего звена 7 по условию (Ю) максимальный выходной сигнал интегратора 5 не превышает напряжения срабатывания релейного элеIмента 6, т.е. исключаются ложные срабатывания системы контроля при изменении напряжения управления преобразователя.
При изменении напряжения управления преобразователя сигнал с выхода дифференцирующего элемента 7 уменьшает темп интегрирования и выходной сигнал Uj не доходит до уровня Ucp
хотя в динамике время между импульсами изменяется (фиг, 2а).
При асимметрии импульсов управления увеличивается время между импульсами на величину а, (фиг. 26), что приводит в результате к срабатыванию релейного в момент времени t,.
Введение коррекции в формирование заданного интервала времени по первой производной напряжения управления преобразователя по времени исключает ложное появление сигнала неисправности в динамике от изменения напряжения управления, обеспечивает своевременное формирование сигнала неисправности при исчезновении импульсов управления, что позволяет
отключить преобразователь до аварийного режима опрокидывания инвертора, исключает работу преобразователя при большой асимметрии импульсов управления, повышает надежность контроля
системы управления тиристорного преобразователя.
Формула изобретения Способ контроля системы управления тиристорным преобразователеМд при котором сравнивают длительность интервалов времени между импульсами управления тиристорами с длительностью заданного интервала времени и в случае превьш1ения длительностью интервала
времени между импульсами управления длительности заданного интервала времени формируют сигнал неисправности отличающийся .тем., что S с целью повышения надежности
контроля, заданный интервал времени формируют в виде разности постоянного интервала времени и интервала времени,, пропорционального первой производной сигнала управления преобразователем по времени.
фиг.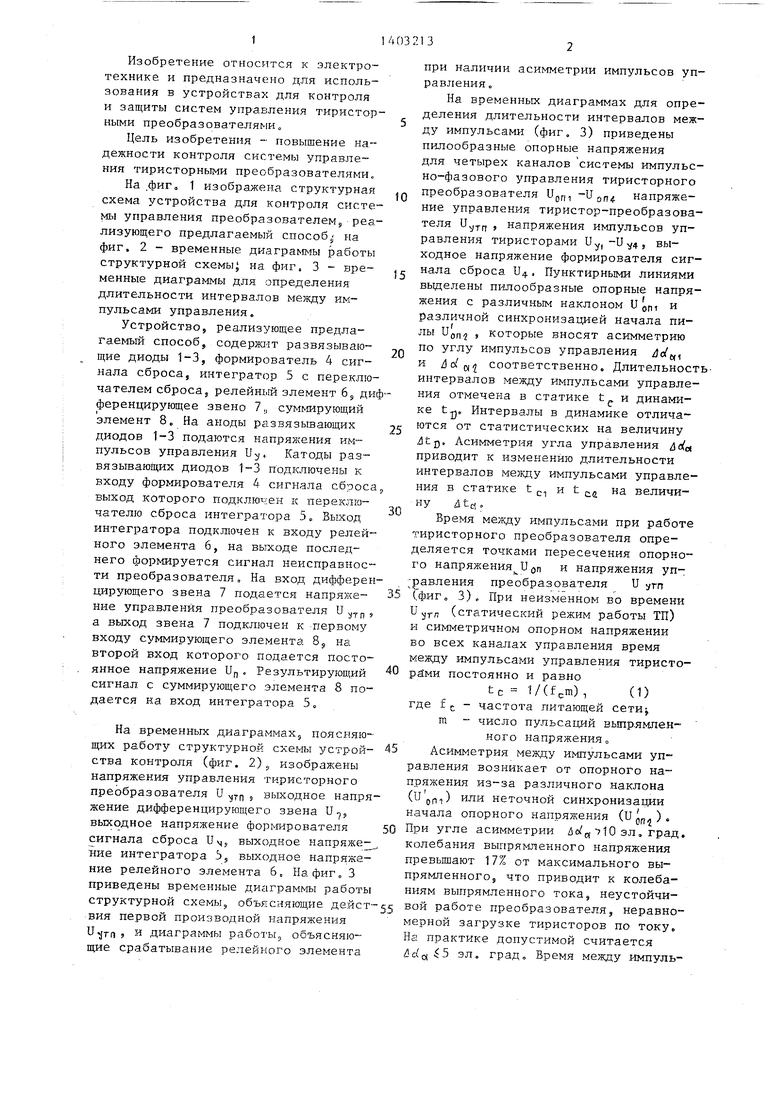
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| АДАПТИВНОЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2009 |
|
RU2400910C1 |
| Устройство для импульсно-фазового управления преобразователем | 1985 |
|
SU1257785A1 |
| Устройство для управления тиристорным преобразователем | 1990 |
|
SU1705990A1 |
| Способ регулирования тока нагрузки тиристорного преобразователя и устройство для его осуществления | 1977 |
|
SU661536A1 |
| Устройство импульсно-фазового управления тиристорным выпрямителем | 1980 |
|
SU920564A1 |
| Аналого-цифровой интегратор | 1979 |
|
SU813456A2 |
| СИСТЕМА ИМПУЛЬСНО-ФАЗОВОГО УПРАВЛЕНИЯ | 2003 |
|
RU2248659C2 |
| Способ фазового управления 2 @ фазным тиристорным преобразователем и устройство для его осуществления | 1983 |
|
SU1133642A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2011 |
|
RU2465709C1 |
Изобретение относится к.электротехнике и предназначеио для использования в устройствах для контроля и защиты систем управления тиристор- ными преобразователями. Целью изобретения является повьш1ение надежности контроля системы управления тирис- торными преобразователями. При изме- нении сигнала управления преобразователем в динамических режимах работы длительность интервалов времени между импульсами управления тиристорами изменяется, что может приводить к ложным срабатьшаниям системы контроля. Введение коррекции заданного интервала времени по первой производной сигнала управления позволяет устранить ложные срабатьгаания системы контроля, а также обеспечить контроль асимметрии управляющих импульсов. 3 ил. с (Л с:
и угп
Uj
и
Ucp
Us
UB
At а
L
i
чА
i1
iz
П
fuff2
фи8.3
| Способ контроля системы управленияпРЕОбРАзОВАТЕлЕМ | 1979 |
|
SU799069A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ НЕНСНРДВНОСТИ | 0 |
|
SU266921A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
