
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1995 |
|
RU2087781C1 |
| Механическая бесступенчатая передача | 1988 |
|
SU1525377A1 |
| РЕКУПЕРАТИВНАЯ МЕХАНИЧЕСКАЯ САМОРЕГУЛИРУЕМАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА С МАХОВИЧНЫМ НАКОПИТЕЛЕМ ЭНЕРГИИ | 2004 |
|
RU2261385C1 |
| Бесступенчатая импульсная передача | 1986 |
|
SU1352120A1 |
| Импульсная бесступенчатая передача | 1982 |
|
SU1021847A2 |
| УНИВЕРСАЛЬНАЯ МАШИНА ДЛЯ ЧИСТКИ ТРУБОПРОВОДОВ | 1999 |
|
RU2145528C1 |
| АВТОМАТИЧЕСКИЙ ПРИВОД | 1994 |
|
RU2082050C1 |
| МЕХАНИЧЕСКАЯ САМОРЕГУЛИРУЕМАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2003 |
|
RU2252351C1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1990 |
|
RU2018746C1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2002 |
|
RU2211971C1 |
Изобретение относится к машиностроению. Целью изобретения является обеспечение реверса передачи путем установки наружных обойм механизмов свободного хода в корпусе посредством управляемых муфт и упрощение конструкции передачи путем размещения механизма изменения эксцентриситета на ведущем валу со стороны его выхода из корпуса. При включении одной из управляемых муфт 19 или 20 соответственно одна из наружных обойм 10 или 11 заклинится на корпус 1, а вращение второй посредством центрального колеса 13 или 12 и водила 14 дифференциального механизма передается на выходной вал в том или ином, направлении. 2 з.п. ф-лы, 4 ил. С и
М
О
teQ
1
Изобретение относится к машиностроению.
Цель изобретения - реверс ведомо вала путем установки наружных обойм механизмов свободного хода в корпус посредством управляемых муфт и упрощение конструкции передачи путем рамещения механизма изменения эксцентриситета на ведущем валу со стороны .его выхода из корпуса.
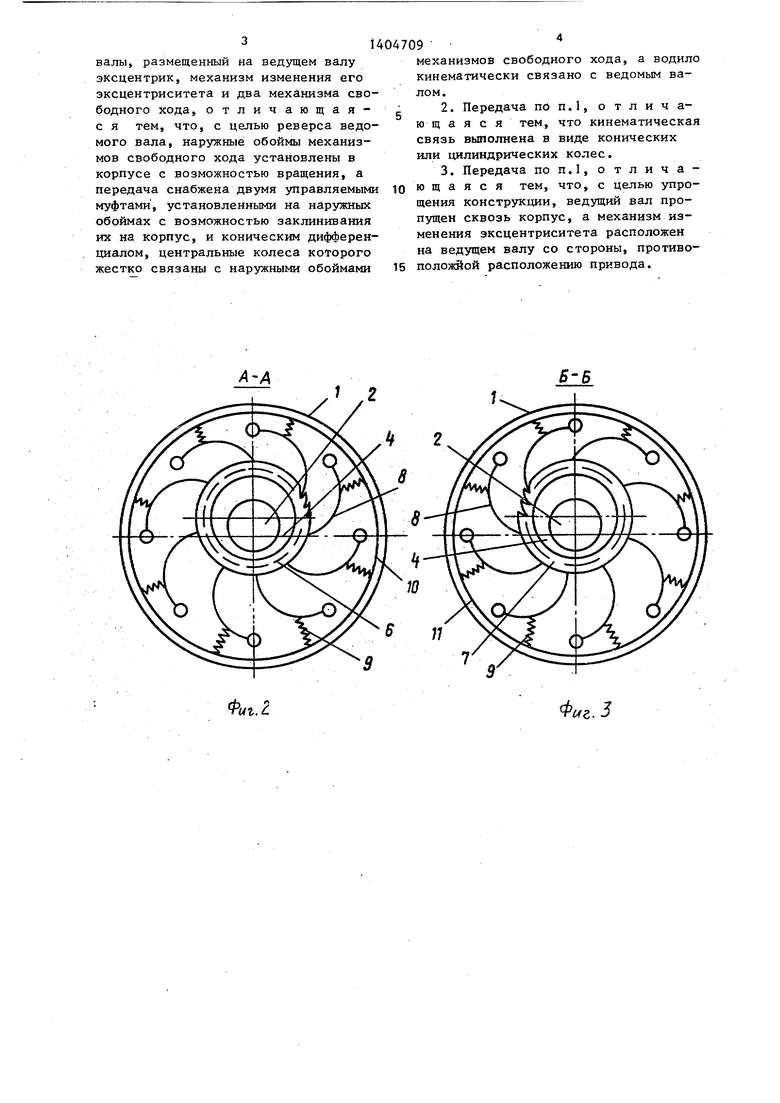
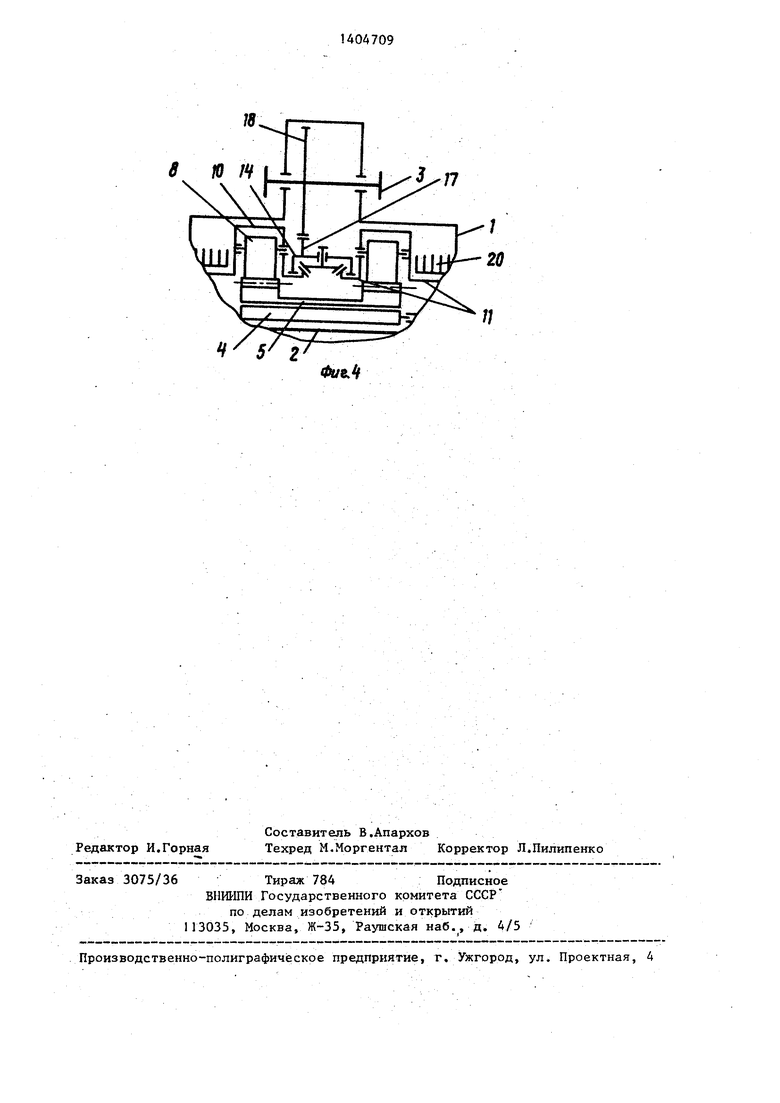
На фиг.1 изображена бесступенчат передача; на фиг.2 - сечение А-А на фиг.1; на фиг.3 - сечение Б-Б на фиг.1; на фиг.4 - вариант конструкц реверсивной бесступенчатой передачи с параллельным расположением осей ведущего и ведомого валов.
Бесстзшенчатая передача содержит установленные в корпусе I ведущий 2 и ведомый 3 валы. На эксцентриковой части ведущего вала 2, пропущенного через корпус 1, установлен эксцентрик 4, на котором свободно размещен промежуточный вал 5, жестко связан- ный с расположенными навстречу один другому храповыми колесами 6 и 7 дву механизмов свободного хода (МСХ), нправления действия которых противо
повым колесам 6 и 7 упругими элементами 9, а наружные обоймы 10 и 11 установлены на подшипниках в корпусе 1 и связаны соответственно с центральными колесами 12 и 13 конического дифференциала, водило 14 которого кинематически связано с ведомым валом 3.
Кинематическая связь может быть реализована или с помощью конических колес 15 и 16,.или с помощью цилиндрических колес 17.и 18. В последнем случае оси ведущего и ведомого валов параллельны. Количество последних может быть произвольным. Наружные обоймы 10 и 11 связаны с корпусом 1 посредством управляемых электромагнитных муфт 19 и 20.
Механизм изменения эксцентриситета вьшолнен по схеме.с двумя эксцентриками, расположен на ведущем валу 2 со стороны, противоположной расположению привода. При этом эксцентрик 4 посредством винтовой пары 21 связан с управляющей рукояткой 22.
Передача работает следующим образом.
Если эксцентриситет OS эксцентрика равен нулю, при вращении ведущего вала 2 промежуточный вал 5 остается
35
40
положны. Собачки 8 поджимаются к хра-зо ные собачки 8 прищелкивают по храповому колесу 6. С увеличением эксцентриситета 08 передаточное отнощение корпусного МСХ возрастает.
В выходном МСХ, для которого промежуточный вал 5 является ведущим элементом, вращение ведомой наружной обойме 11 передает та собачка 8, которая сообщает ей в данный момент времени наибольщую угловую скорость. Диапазон регулирования всей передачи равен произведению диапазонов регулирования корпусного и выходного Мех.
Вращение наружной обоймы 11 и связанного с ней центрального колеса 13 передается водилу 14 и далее ведомому валу 3. Реверс последнего осуществляется Путем одновременного выключения муфты 19 и включения муфты 20, вследствие чего корпусной и выходной МСХ меняются местами.
Изменение передаточного отношения осуществляется вращением рукоятки 22, изменяя тем самым величину эксцентриситета OS.
45
50
55
Форм у л а изобретения
неподвижным, а следовательно, неподвижен и ведомый вал 3. Имеет место столовый режим, который осуществляется независимо от положения электромагнитных муфт 19 и 20. Стоповый режим может быть осуществлен при произвольном значении эксцентриситета OS при одновременном выключении электромагнитных муфт 19 и 20, что приводит к свободному вращению наружных обойм 10 и 11 МСХ в корпусе 1.
При ненулевом значении эксцентри- ситета OS и включенной одной из муфт 19.или 20 вращение ведущего вала 2 вызывает сложное плоскопараллельнре движение промежуточного вала 5. Если включена электромагнитная муфта 19, а муфта 20 выключена, наружная обойма 10 относится к корпусному МСХ, а наружная обойма 11 - к выходному, В корпусном МСХ в произвольный момент времени в зацеплении с храповиком 6 находится та собачка 8, которая может сообщить ведомому элементу (им для корпусного МСХ является промежуточный вал 5) наибольщую по сравнению с другими собачками скорость вращения относительно ведущего вала 2.0сталь55
Форм у л а изобретения
валы, размещенный на ведущем валу эксцентрик, механизм изменения его эксцентриситета и два механизма свободного хода, отличающая- с я тем, что, с целью реверса ведомого вала, наружные обоймы механизмов свободного хода установлены в корпусе с возможностью вращения, а передача снабжена двумя управляемыми муфтами , установленными на наружных обоймах с возможностью заклинивания их на корпус, и коническим дифференциалом, центральные колеса которого жестко связаны с наружными обоймами
А-А
.г
04709
механизмов свободного хода, а водило кинематически связано с ведомым валом.
Б-В
Фи.З
8 Ю f L±
Фие.
Л-/7
/;
| Леонов А.И., Дубровский А.Ф | |||
| Механические бесступенчатые нефрикционные передачи непрерывного действия | |||
| - М.:Машиностроение, 1984, с.33, рис.28. |
