Изобретение относится к добыче угля подземным способом, а именно с помощью механизированных крепей. I Целью изобретения является умень- |Иение утопания конвейера на слабых почвах путем регулирования условия прижатия кон вейера к почве по его длине.
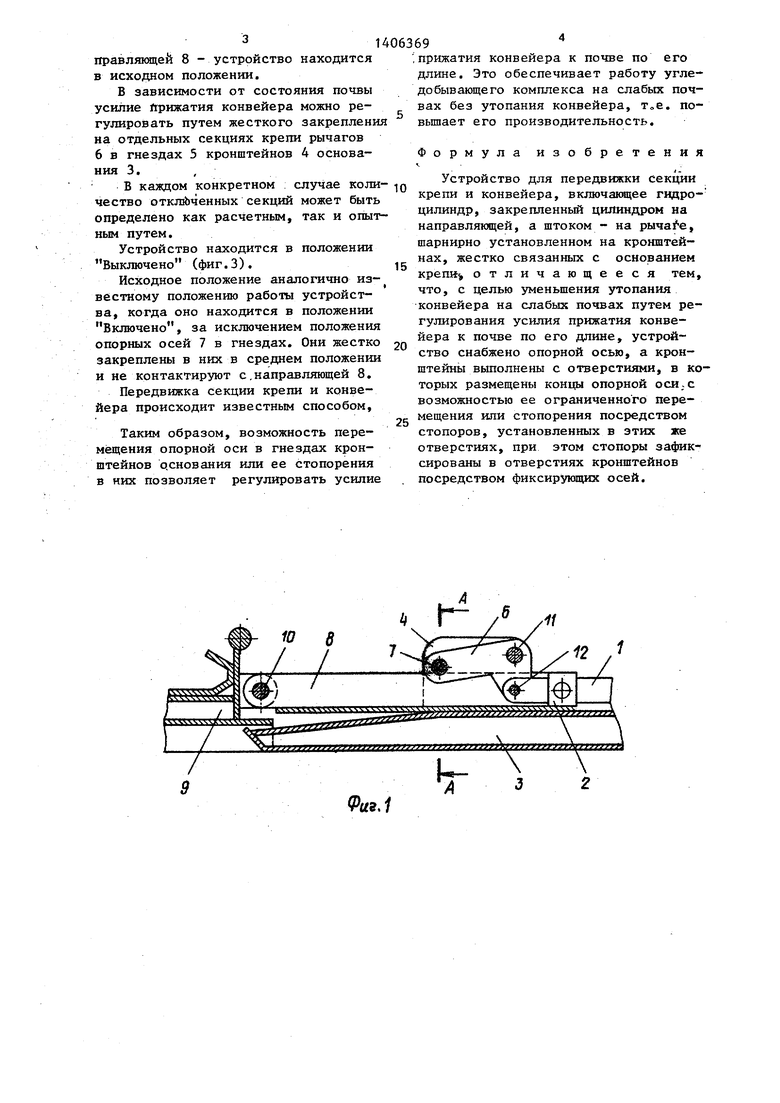
На фиг.1 изображено предлагаемое устройство, вид сбоку, разрез по продольной оси секции; на фиго2 - то же, вид сверху; на фиг.З - разрез А-А на фиг.1.(устройство находится в положении Выключено)} на фиг. 4 - разрез А-А на фиг.1 (устройство находится в положении Включено)о
Устройство содержит гидроцилиндр
1с цапфой 2, основание 3 секции крепи с кронштейнами 4, имеющими гнезда 5, рычаг 6 с опорной осью 7, направляющую 8, конвейер 9, оси 10-13 и стопоры 14.
Гидроцилиндр 1 посредством цапфы
2закреплен на направляющей 8, а по- средством оси 12 - на рычаге 6.
Направляющая 8 посредством оси 10 соединена с конвейером 9. Опорная ось 7 выполняется съемной с целью обеспечения монтажа и демонтажа уст- ройства.
Рычаг 6 посредством оси 11 закреплен на кронштейнах 4 основания 3 секции крепи и несет опорную ось 7, концы- которой размещены в гнездах 5.
Стопор 14 выполнен П-образной формы и может быть закреплен в кронштейнах 4 фиксирующими осями 13 в одном из двух положений: в положении, когда устройство выключено (фиг.З), и в положении, когда устройство включено -(фиг.4-).
В.первом случае опорная ось 7, гнезда 5 и стопоры 14 контактируют одновременно продольными и торцовыми поверхностями. Взаимодействием продольных, поверхностей указанных элементов осуществляется жесткое закрепление опорной оси в кронштейнах 4, а взаимодействием торцовых поверхнос- тей опорной оси и стопоров 14 - закрепление опорной оси в осевом направлении.
Во втором случае концы опорной оси 7, находящиеся в гнездах 5, контак- :тируют только со стопора:.1И 14 и толь ко торцовыми поверхностя ми. Продольные поверхности гнезд 5 служат только .для ограничения перемещения опорной
с
0
5
0
оси 7., Взаимодействием торцовых поверхностей опорной оси и стопоров осуществляется закрепление опорной оси в осевом направлении.
Устройство для передвижки секции крепи и конвейера работает следующим образом.
Устройство находится в положении Включено (фиг.1, 2 и 4).
В исходном положении на всех секциях крепи гидроцилиндры 1 сжаты, основания 3 секций крепи отстоят от конвейера на шаг передвижки, опорные оси 7 находятся у нижних продольных поверхностей гнезд 5 и прижаты к направляющей 8.
При передвижке секций крепи, когда рабочая жидкость поступает в порш- невую полость гидроцилиндра 1, первоначально происходит только поворот рычага 6 по часовой стрелке. Этот процесс длится до тех пор, пока кон- 1ДЫ опорной оси 7, находящиеся в гнездах 5 кронштейна 4 основания 3, не коснутся верхних продольных поверхностей гнезд 5. В дальнейшем усилие гидроцилиндра расходуется только на передвижку секций крепи,которая происходит известным способом.
По окончании выдвижки секций все опорные оси 7 в гнездах 5 окажутся в верхнем положении.
При передвижке конвейера, когда рабочая жидкость поступает в штоковые полости гидроцилиндров 1, первоначально происходит поворот рычагов 6 против часовой стрелки. Этот процесс длится до тех пор, пока опорные оси 7 не коснутся направляющих 8. В дальнейшем гидроцилиндрами 1 осуществляется одновременно передвижка конвейера и его прижатие к почве. При этом, если опорные оси 7 выполнены цилиндрической формы, при движении направ ляющей 8 усилием трения опорные оси 7 начинают вращаться, что снижает силу трения между этими элементами (трение качения).
Таким образом, в процессе передвижки конвейера осуществляется автоматическое прижатие его к почве пласта.
В конце выдвижки конвейера гидроцилиндры 1 на всех секциях сжаты, основания 3 секций крепи отстоят от , конвейера на шаг передвижки, опорные оси 7 находятся у нижних продольных поверхностей гнезд 5 и прижаты к направлякицей 8 - устройство находится в исходном положении.
В зависимости от состояния почвы усилие йрижатия конвейера можно регулировать путем жесткого закреплени на отдельных секциях крепи рычагов 6 в гнездах 5 кронштейнов 4 основания 3. ,
В каждом конкретном случае коли чество отключенных секций может быть определено как расчетным, так и опытным путем.
Устройство находится в положении Выключено (фиг.3).
Исходное положение аналогично известному положению работы устройства, когда оно находится в положении Включено, за исключением положения опорных осей 7 в гнездах. Они жестко закреплены в них в среднем положении и не контактируют с.направляющей 8.
Передвижка секции крепи и конвейера происходит известным способом.
Таким образом, возможность перемещения опорной оси в гнездах кронштейнов рснования или ее стопорения в них позволяет регулировать усилие
Q
5
0
5
.прижатия конвейера к почве по его длине. Это обеспечивает работу угледобывающего комплекса на слабых почвах без утопания конвейера, т,е. по- вьш1ает его производительность.
Формула изобретения
V
Устройство для передвижки секции крепи и конвейера, вкгаочакщее гидро- цилиндр, закрепленный цилиндром на направляющей, а штоком - на , шарнирно установленном на кронштейнах, жестко связанных с основанием креп отличающееся тем, что, с целью уменьшения утопания конвейера на слабых почвах путем регулирования усилия прижатия конвейера к почве по его длине, устройство снабжено опорной осью, а кронштейны выполнены с отверстиями, в которых размещены концы опорной оси,с возможностью ее ограниченного перемещения или стопорения посредством стопоров, установленных в этих же отверстиях, при этом стопоры зафиксированы в отверстиях кронштейнов посредством фиксирующих осей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОСНОВАНИЕ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1991 |
|
RU2010977C1 |
| СПОСОБ ПЕРЕДВИЖКИ КРЕПИ | 1990 |
|
RU2007582C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1992 |
|
RU2005883C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ СОПРЯЖЕНИЯ | 2012 |
|
RU2490468C1 |
| УГЛЕДОБЫВАЮЩИЙ АГРЕГАТ | 1996 |
|
RU2130553C1 |
| МЕХАНИЗИРОВАННЫЙ УЗЕЛ СОПРЯЖЕНИЯ ЛАВЫ СО ШТРЕКОМ | 1992 |
|
RU2024760C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ СЕКЦИИ КРЕПИ И КОНВЕЙЕРА | 2002 |
|
RU2234607C2 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ МОЩНЫХ ПЛАСТОВ | 1990 |
|
RU2010976C1 |
| СПОСОБ ВЫЕМКИ ПОЛЕЗНОГО ИСКОПАЕМОГО И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2033522C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1991 |
|
RU2042825C1 |

Изобретение относится к оборудованию, используемому при подземной добыче угля. Цель изобретения - уменьшение утопания конвейера на слабых почвах путем регулирования усилия прижатия конвейера к почве по его длине. Для этого устр-во для передвижки секций крепи и конвейера, Содержащее гидроцилиндр с цапфой, осА А нование крепи 3 с кронште;йнами 4 и направляющую 8, имеет опорную ось 7. Концы ее размещены в отверстиях 5 кронштейнов 4 и зафиксированы осями 13. Стопорение опорной оси 7 и ограничение ее перемещения осуществляется посредством стопоров 14, установленных в отверстиях 5. При передвижке секции крепи происходит поворот рычага 6 по часовой стрелке до тех пор, пока концы опорной оси 7 не коснутся верхних продольных поверхностей гнезд. При передвижке кон- вейера происходит поворот рычага 6 против часовой стрелки до момента, когда концы опорной оси коснутся направляющих 8. Осуществляется одновременная передвижка конвейера и его прижатие к почве. В зависимости от состояния почвы усилие прижатия конвейера можно регулировать путем жа- сткого закрепления на отдельных секциях крепи рычагов .6 в отверстиях 5 кронштейнов 4. 4 mik. i КЛ с Фиг.Ъ
Фиг.1
л
/ .и
.
| Секция механизированной крепи | 1978 |
|
SU941613A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| 1970 |
|
SU420784A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
