оо с :о ьэ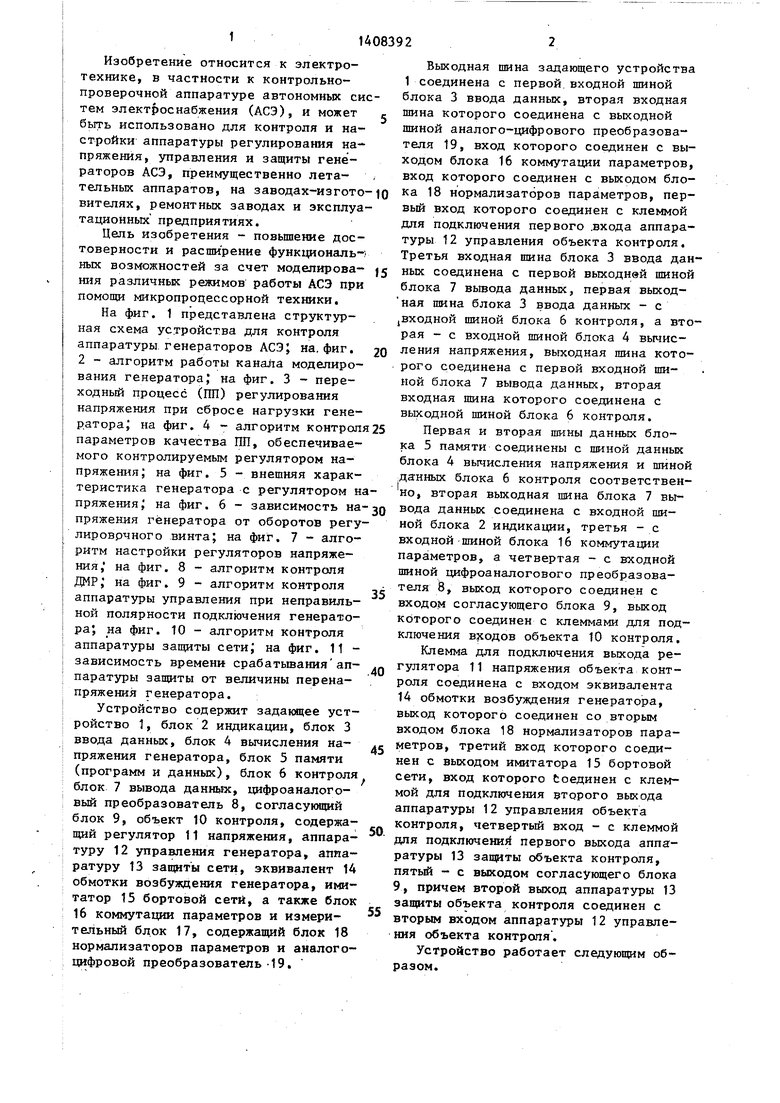

| название | год | авторы | номер документа |
|---|---|---|---|
| Транзисторный регулятор напряжения | 1981 |
|
SU1073873A1 |
| СТЕНД ФУНКЦИОНАЛЬНОГО КОНТРОЛЯ И ДИАГНОСТИКИ ЭЛЕКТРОННЫХ РЕГУЛЯТОРОВ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2005 |
|
RU2308749C2 |
| СИСТЕМА МОНИТОРИНГА АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ ВОЗБУЖДЕНИЯ И СИСТЕМ ВОЗБУЖДЕНИЯ ГЕНЕРАТОРОВ ЭЛЕКТРОСТАНЦИИ | 2013 |
|
RU2509333C1 |
| Контрольно-проверочный комплекс | 2020 |
|
RU2755331C1 |
| Устройство для контроля и настройки регуляторов напряжения | 1983 |
|
SU1161904A1 |
| Устройство для автоматического контроля параметров интегральных схем | 1988 |
|
SU1649474A1 |
| Система контроля параметров элект-РОННыХ CXEM | 1979 |
|
SU809072A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМОМ РАБОТЫ ПЛАЗМОТРОНА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389055C2 |
| МНОГОКАНАЛЬНЫЙ ТРАНСФОРМАТОР ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2014 |
|
RU2567849C1 |
| СПОСОБ ИМИТАЦИИ ДЕФЕКТОВ ПРИ УЛЬТРАЗВУКОВОМ КОНТРОЛЕ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2278377C2 |

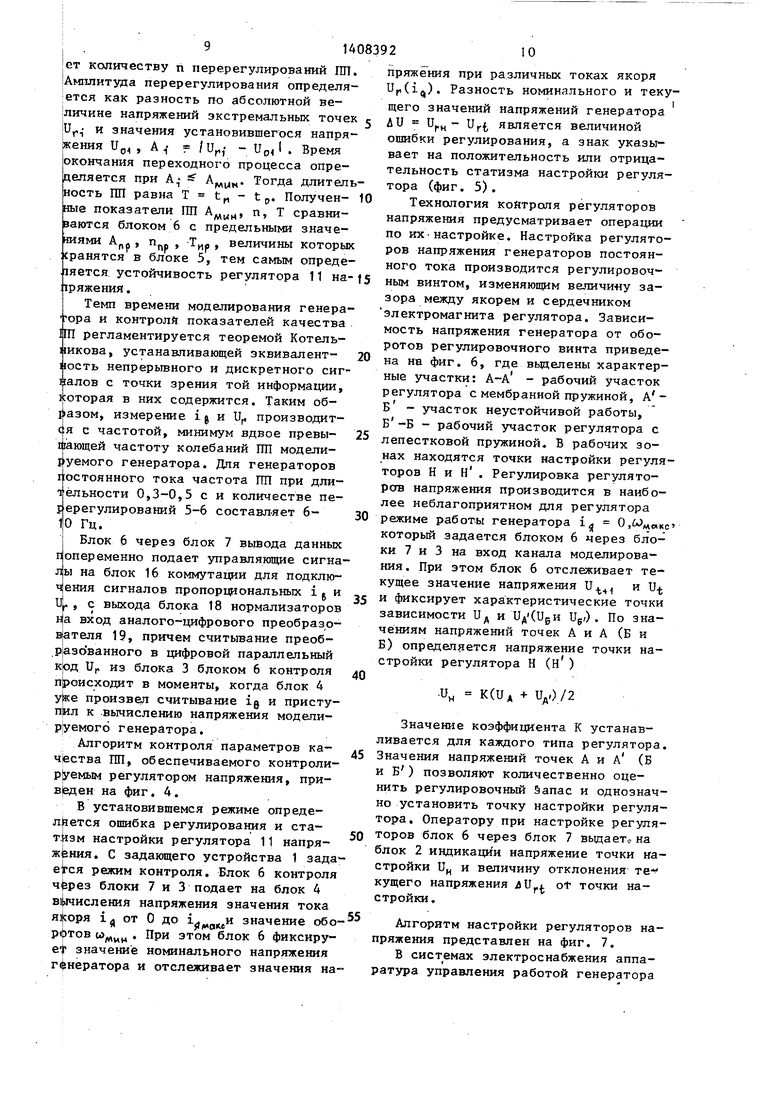
Изобретение относится к электротехнике и может быть использовано для контроля и настройки аппаратуры регулирования напряжения, управления и защиты генераторов преимущественно летательных аппаратов. Цель изобретения - поньшение достоверности и расширение функциональных возможностей устройства. Устройство содержит за- дакщее устройство 1, блок 2 индикации, блоки 3 и 7 ввода и вывода данных, блок 4 вычисления напряжения генератора, блок 6 контроля, блок 5 памяти, цифроаналоговьй преобразователь 8, согласующий блок 9, блок 16 коммутации параметров и измерительный блок 17. Измерительный блок 17 состоит из блока 18 нормализаторов параметров и аналого-цифрового преобразователя 19. Объект 10 контроля включает регулятор 11 напряжения, аппаратуру 13 защиты сети. При всем разнообразии первичных систем электроснабжения автономных систем данное устройство позволяет осуществить общий подход к контролю их аппаратуры- регулирования, управления и защиты, основанный на полунатурном моделировании работы модели генератора и синхронизации режимов работы модели генератора с контролем параметров испытуемой аппаратуры, что позволяет производить контроль и настройку аппаратуры в переходных и установившихся режимах работы генератора, включая аварийные. 11 ил. Ф (Л 4;
I±
/7i
9иг.}
Изобретение относится к электротехнике, в частности к контрольно- проверочной аппаратуре автономных ситем элект)оснабжения (АСЭ), и может быть использовано для контроля и настройки аппаратуры регулирования напряжения, управления и защиты гене - раторов АСЭ, преимущественно летательных аппаратов, на заводах-изгото вителях, ремонтных заводах и эксплуатационных предприятиях.
Цель изобретения - повышение достоверности и расширение функциональных возможностей за счет модепирова- ния различных режимов работы АСЭ при помощи микропроцессорной техники.
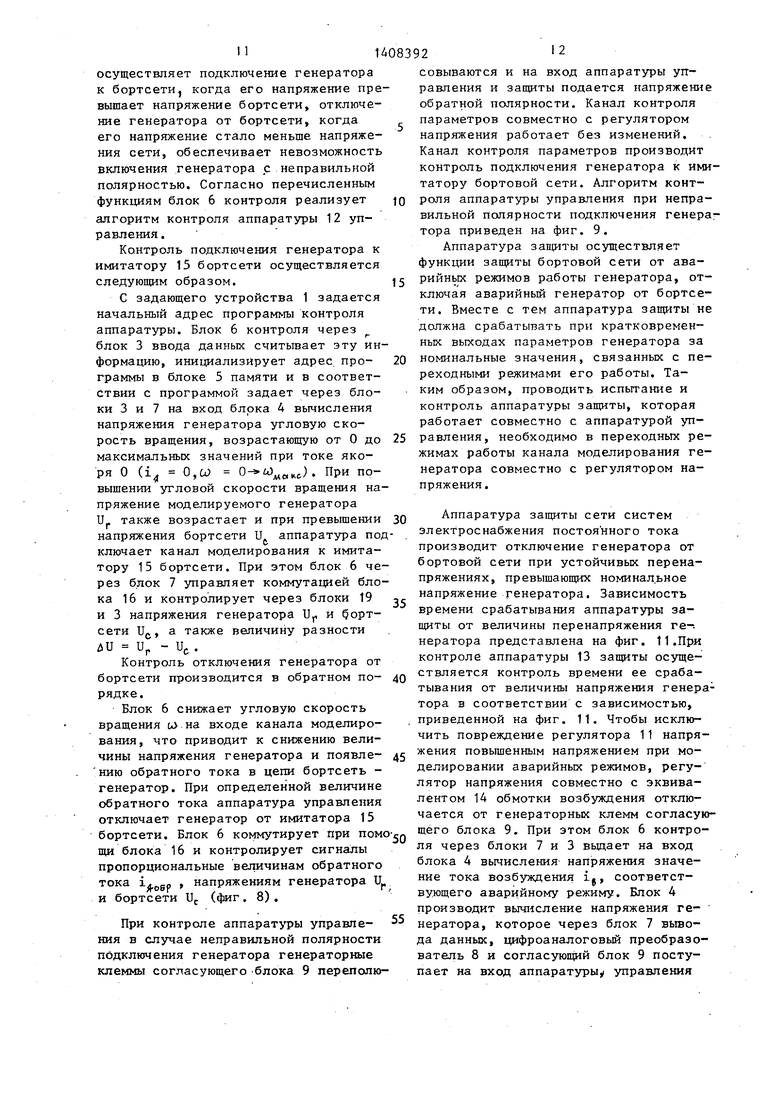
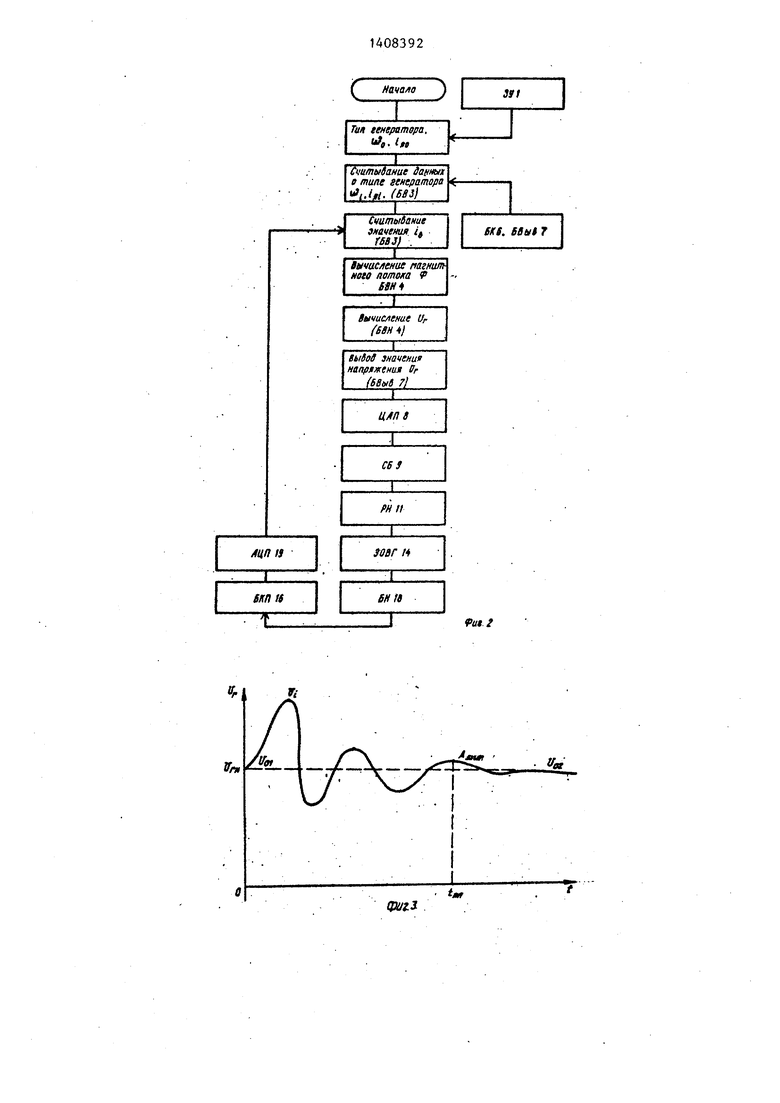
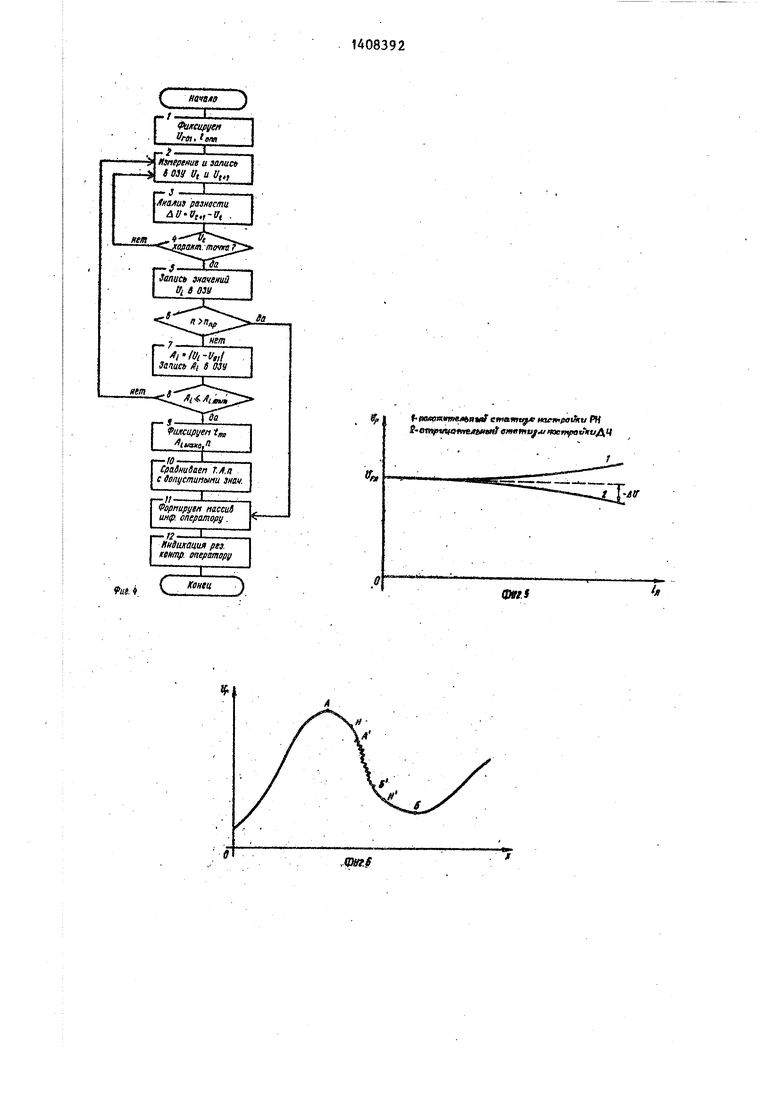
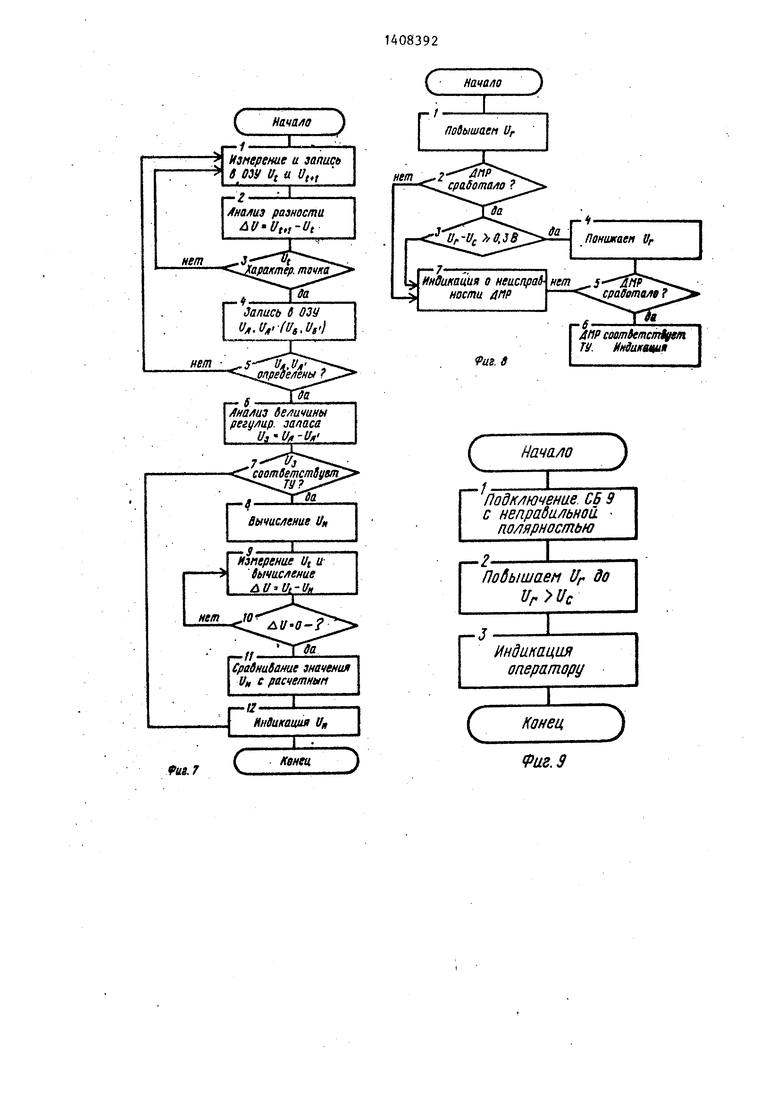
На фиг. 1 представлена структурная схема устройства для контроля аппаратуры генераторов АСЭ; на, фиг. 2 - алгоритм работы канала моделирования генератора; на фиг. 3 - переходный процесс (ПП) регулирования напряжения при сбросе нагрузки гене- ратора; на фиг. 4 - алгоритм контрол параметров качества ПП, обеспечиваемого контролируемым регулятором напряжения; на фиг. 5 - внешняя характеристика генератора с регулятором нпряжения; на фиг. 6 - зависимость на пряжения генератора от оборотов регу лироврчного винта; на фиг. 7 - алгоритм настройки регуляторов напряжения, на фиг. 8 - алгоритм контроля ДМР; на фиг. 9 - алгоритм контроля аппаратуры управления при неправильной полярности подключения генератора; на фиг. 10 - алгоритм контроля аппаратуры защиты сети; на фиг. 11 - зависимость времени срабатьшания ап- паратуры запиты от величины перена- пряжения генератора.
Устройство содержит задающее устройство 1, блок 2 индикации, блок 3 ввода данных, блок 4 вычисления на- пряжения генератора, блок 5 памяти (программ и данных), блок 6 контроля блок 7 вывода данных, цифроаналого- вый преобразователь 8, согласующий блок 9, объект 10 контроля, содержащий регулятор 11 напряжения, аппаратуру 12 управления генератора, аппаратуру 13 защиты сети, эквивалент 14 обмотки возбуждения генератора, имитатор 15 бортовой сети, а также блок
16 коммутации параметров и измерительный блок 17, содержащий блок 18 нормализаторов параметров и аналого- цифровой преобразователь-19.
0 - Q
,
0
5
Выходная шина задающего устройства 1 соединена с первой входной шиной блока 3 ввода данных, вторая входная шина которого соединена с выходной шиной аналого-цифрового преобразователя 19, вход которого соединен с выходом блока 16 коммутации параметров, вход которого соединен с выходом блока 18 нормализаторов параметров, первый вход которого соединен с клеммой для подключения первого .входа аппаратуры 12 управления объекта контроля. Третья входная шина блока 3 ввода данных соединена с первой выходнвй шиной блока 7 вывода данных, первая выход- ная шина блока 3 ввода данных - с входной шиной блока 6 контроля, а вторая - с входной шиной блока 4 вычисления напряжения, выходная шина которого соединена с первой входной шиной блока 7 вывода данных, вторая входная шина которого соединена с выходной шиной блока 6 контроля.
Первая и вторая шины данных блока 5 памяти соединены с шиной данных блока 4 вычисления напряжения и шиной данных блока 6 контроля соответственно, вторая выходная шина блока 7 вывода данных соединена с входной шиной блока 2 индикации, третья - с входной шиной блока 16 коммутации параметров, а четвертая - с входной шиной цифроаналогового преобразователя 8, выход которого соединен с входом согласующего блока 9, выход которого соединен с клеммами для подключения входов объекта 10 контроля.
Клемма для подключения выхода регулятора 11 напряжения объекта контроля соединена с входом эквивалента 14 обмотки возбуждения генератора, выход которого соединен со вторым входом блока 18 нормализаторов параметров, третий вход которого соединен с выходом имитатора 15 бортовой сети, вход которого Ьоединен с клеммой для подключения второго выхода аппаратуры 12 управления объекта контроля, четвертый вход - с клеммой для подключение первого выхода аппаратуры 13 завдты объекта контроля, пятый - с выходом согласующего блока 9, причем второй выход аппаратуры 13 защиты объекта контроля соединен с вторым входом аппаратуры 12 управления объекта контроля.
Устройство работает следующим образом.
С задающего устройства 1 задаются исходные данные для работы блоков 4 и 6, Для блока 4 вычисления напряжения генератора задаются тип моделщзуемо- го генератора в виде начального адреса ячеек памяти блока 5 подпрограммы моделирования данного типа генератора, начальная угловая скорость вращения ротора генератора (л) , началь- ный ток якоря генератора i.
Для блока 6 контроля задаются состав испытуемой аппаратуры и режим ее контроля в виде начального адреса подпрограммы контроля данного типа аппаратуры в блоке 5 памяти.
Блок 4 вычисления напряжения генератора через блок 3 ввода данных считывает информацию о типе моделируемого генератора, инициализирует началь- ный адрес программы моделирования генератора в блоке 5 памяти и в соответствии с этой пррграммой и началь- ньши значениями угловой скорости вращения ротора cOj, и тока якоря i,, ге- нератора производит вычисление напряжения моделируемого генератора.Для генераторов постоянного тока вычисление напряжения производится по уравнению равновесия напряжений для цепи якоря
V, ,
где с - электромашинная постоянная
генератора; R - сопротивление цепи якоря
генератора , Ф - магнитный поток генератора.
Магнитный поток генератора является функцией тока возбуждения и тока якоря генератора Ф 9 (ij й ) Значение магнитного потока определяется по характеристике намагничива- ния генератора и описьгоается следующей аналитической зависимостью
Р - f . 4- 1 л
т - Tjj, + ,
где К,- - тангенс угла наклона касательной к характеристике намагничивания генератораi f - остаточный магнитный поток
генератора.
Аналогично производится вычисление напряжения генератора переменного тока, которое также является функцией трех переменных U) , i, ij.
5
0 5
Q
0
5
0
5
Напряжение, вычисленное блоком 4, в цифровом коде поступает через блок 7 вывода данных на цифроаналоговый преобразователь 8, затем на согласующий блок 9, где оно усиливается и преобразовывается до величины напряжения, соответствующего реальному напряжению генератора. Напряжение, соответствующее напряжению реального генератора, подается на входы объекта 10 контроля, которые в системах электроснабжения подключаются к клеммам генератора. Объект 10 контроля в общем случае включает регулятор 11 напряжения, аппаратуру 12 управления работой генератора и аппаратуру 13 защиты сети от аварийных режимов работы генератора.
Нагрузкой регулятора 11 напряжения служит эк;вивалент 14 обмотки возбуждения генератора. Подключение регулятора 11 напряжения к эквиваленту 14 обмотки возбуждения генератора осуществляется так же, как и к обмо тке возбуждения генератора. Аппаратура управления 12 и защиты 13 генератора осуществляет подключение либо отключение генератора к бортовой сети, функции которой вьтолняет имитатор 15 бортсети.
Соединение входов обьекта 10 контроля с выходом согласующего блока 9 и соединение его элементов между собой производится так же, как и в системах электроснабжения. В соответствии с величиной напряжения регулятор 11 напряжения изменяет свое сопротивление -и следовательно, ток в эквиваленте 14 обмотки возбуяодения генератора. Регулятор 11 напр жения совместно с эквивалентом 14 обмотки возбуждения является цепью .обмотки возбуждения модели генератора, однако величины напряжений и токов этой цепи соответствуют величинам реальных напряжений и токов генератора.
Например для генераторов постоянного тока цепь регулятор 11 напряжения - эквивалент 14 обмотки возбуж- дения моделирует в реальных величинах уравнение равновесия напряжений цепи возбуждения
и, R, r,)i ,
где R, L. - сопротивление и индуктивность: обмотки возбуждения;
51408392
- сопротивление угольного
Iстолба регулятора напря
Iжения.
В устройстве величины R, и L экI/вР
Бивалента 14 обмотки возбуждения, в |цепи которого включен испытуемьй реглятор 11 напряжения, равны соответствующим величинам обмотки возбуждения генератора, чем обеспечивается адекватность моделирования цепи обмотки возбуждения генератора.
Сигнал обратной связи с регулятора 1 1 напряжения в виде напряжения, пропорци онального току возбуждения, протекающему в эквиваленте 14 обмотки возбуждения, подается для усиления в блок 18 нормализаторов, затем коммутируется блоком 16 коммутации лараметров, управление которым осу- цествляет блок 6 контроля через блок
7 вывода данных, на вход аналого-цифт U, U, Uj понижается на делителях эового преобразователя 19. С выхода аналого-цифрового преобразователя 1,9 преобразованный в цифровой двоич- 25 параллельный код сигнал поступа- i;t на блок 3 ввода данных, откуда считывается блоком 4 вычисления напряжения генератора и блоком 6 контроля . Блок 4 в соответствии с кодом 30 тока возбуждения ij производит вычисление магнитного потока f и напряжения генератора Up.
Алгоритм работы канала моделированапряжения до- уровня опорного напр жения аналого-цифрового преобразов теля 19. Контроль параметров произ водится следующим образом.
Блок 6 через блок 7 вьгоода данных вьщает упра.вляющие сигналы на блок 16 коммутации для под1 лючения сигналов с вькода блока 18 на вход аналого-цифрового преобразователя Преобразованные преобразователем 19 в двоичный параллельный код сигналы поступают через блок 3 в блок 6 ко троля. Блок 6 контроля по программ производит обработку и анализ пара метров объекта 10 контроля. Резуль таты контроля в виде информации А паратура исправна (неисправна), па
1ИЯ генератора представлен на фиг. 2, Совместно с каналом моделирования 1 енератора работает канал контроля lapaj eTpoB. Блок 6 контроля через б|лок 3 ввода данных считывает данные
35
Блок 6 через блок 7 вьгоода данных вьщает упра.вляющие сигналы на блок 16 коммутации для под1 лючения сигналов с вькода блока 18 на вход аналого-цифрового преобразователя 19. Преобразованные преобразователем 19 в двоичный параллельный код сигналы поступают через блок 3 в блок 6 контроля. Блок 6 контроля по программе производит обработку и анализ параметров объекта 10 контроля. Результаты контроля в виде информации Аппаратура исправна (неисправна), па4 составе испытуемой аппаратуры и ре- 40 раметры соответствуют (не соответстж|име ее контроля, которые представл|яют собой начальный адрес подпрог|раммы контроля данного типа аппарат|уры в блоке 5 памяти. В соответст-
в с программой контроля блок 6 45
к онтроля вьфабатувает и вьщает через
б1пок вьшода данных сигнал в виде, цифрЬвого двоичного четырехразрядного пап|араллельного кода на подключение
блоком 16 коммутации параметров сиг- Q
н|ала по току возбуждения ig на вход
а|налого-цифрового преобразователя 19.
пЬи этом канал моделирования генерат)ра работает в соответствии со сво-
к алгоритмом.
Дпя контроля в переходных режимах работы генератора блок 6 контроля за- эти режимы каналу моделирования
55
вуют) ТУ выводятся через блок 7 на блок 2 индикации. При настройке аппаратуры блок 6 производит контроль настраиваемого параметра и определяет величину и направление ег о отклонения от нормы. Данная информация также вьтодится на блок 2 игоди- кации.
При моделировании аварийных режимов работы генератора для контроля . аппаратуры 13 защиты сети регулятор 11 напряжения отключается. При этом блок 6 через блоки 7 и 3 вьщает на блок 4 значения тока возбуждения i, соответствующего аварийному режиму работы генератора.
Таким образом, устройство для конт роля аппаратуры генераторов автономпутем подачи на вход блока 4 через блок 3 значений текущих угловой скорости вращения ротора со,- и тока якоря i генератора. Канал моделирования в соответствии с i
ft.
выдает на входы обьекта контроля напряжение заданного режиму работы генератора. Блок 6 по программе производит контроль параметров на выходах объекта 10 контроля: сигнала по току возбуждения ij, напряжения генератора и и бортсети Uj, напряжения срабатьшания промежуточных реле аппаратуры 12 управления Uy и аппаратуры 13 защиты Uj.
Данные параметры поступают с выходов объекта 10 контроля на блок 18 нормализаторов параметров, где сигнал по току возбуждения i. усиливается, а сигнал по напряжениям U,
U, U, Uj понижается на делителях 5 0
5
напряжения до- уровня опорного напряжения аналого-цифрового преобразователя 19. Контроль параметров производится следующим образом.
Блок 6 через блок 7 вьгоода данных вьщает упра.вляющие сигналы на блок 16 коммутации для под1 лючения сигналов с вькода блока 18 на вход аналого-цифрового преобразователя 19. Преобразованные преобразователем 19 в двоичный параллельный код сигналы поступают через блок 3 в блок 6 контроля. Блок 6 контроля по программе производит обработку и анализ параметров объекта 10 контроля. Результаты контроля в виде информации Аппаратура исправна (неисправна), па5
Q
5
вуют) ТУ выводятся через блок 7 на блок 2 индикации. При настройке аппаратуры блок 6 производит контроль настраиваемого параметра и определяет величину и направление ег о отклонения от нормы. Данная информация также вьтодится на блок 2 игоди- кации.
При моделировании аварийных режимов работы генератора для контроля . аппаратуры 13 защиты сети регулятор 11 напряжения отключается. При этом блок 6 через блоки 7 и 3 вьщает на блок 4 значения тока возбуждения i, соответствующего аварийному режиму работы генератора.
Таким образом, устройство для контроля аппаратуры генераторов автоном
ных систем электроснабжения состоит из двух взаимосвязанных каналов. При этом канал моделирования генератора включает блок 4.вычисления напряжения, цифроаналоговый преобразователь 8, согласующий блок 9 и измерительный блок 17, состоящий из блока 18 нормализаторов параметров и аналого- цифрового преобразователя 19, совмест но с объектом 10 контроля и эквивалентом 14 обмотки возбуждения генератора осуществляет полу натурное моделирование генератора на всех режимах его работы, включая и аварийные, и обеспечивает подачу на объект 10 контроля напряжение, соответствующее напряжению реального генератора.
Канал контроля параметров блок 6 контроля, блоки 3 и 7 ввода и вывода данных, блок 2 индикации. Блок 16 коммутации контролируемых параметров осуществляет синхронизацию подачи возмущений в канал моделирования генератора с коммутацией и измерением параметров на выходе контролируемой аппаратуры, а также обработку,.анализ этих параметров и вьдачу .результатов контроля оператору.
В соответствии с режимом работы канала моделирования блок 6 по программе оценивает качество ГШ, устойчивость работы регулятора 11 напряжения, величины ошибки регулирования в установившемся режиме и статизм настройки регулятора, контролирует аппаратуру управления 12 и защиты 13 в переходных режимах, производит расчет, параметров настройки объекта 10 контроля.
Контроль регулятора 11 напряжения осуществляется в переходньк и установившихся режимах работы генератора. В переход«ых режимах контролируются
параметры .качества Ш1, обеспечиваемото испытуемым регулятором 11 напряжения: амплитуды перерегулирования А, количества перерегулирований п и длительность переходного процесса Т. Анализ параметров качества ПП позво- ляет оценить запас устойчивости системы генератор-регулятор, который является одним из основных показателей систем автоматического регулирования. Вычисление этого И1нтегрального показателя производится по сложным за- висимостям, поэтому определение запаса устойчивости испытуемого регулятора производится допусковым контролем
показателей качества ТТЛ. При этом оценка устойчивости сводится к измерению параметров качества ПП Л, п, Т и сравнению их с соответствующими предельными значениями Л, п, Т. Предельные значения связаны с критическими значениями показателей ПП следующими соотношениями
Кр
/А
/Т кр пр
К.
-ПКР
где К., К
п
К, коэффициенты запаса устойчивости по амплитуде перерегулирования, количеству перерегулирований и времени переходного процесса.
Контроль показателей качества ПП производится в наиболее неблагоприятном режиме работы генератора с точки, зрения устойчивости регулятора на холостом ходу (1л 0) при максимальной скорости вращения ротора (а)„). Таким образом, при оценке запаса устойчивости контролируемого регулятора напряжения блок 6 контроля через блок 3 ввода задает на входе канала моделирования наиболее нагруженный режим работы генератора, характеризуе- мьй минимальной угловой скоростью вра
щения а)„„ и
максимальным током i
якоря, а затем режим холостого хода при максимальной скорости вращения тах Контролю подлежит напряжение модели генератора U. Блок 6 контроля по изменению режима работы генератора фиксирует установившееся значение напряжения U , время начала ПП, амплитуды перерегулирований А, минимальное значение амплитуды перерегу-
тается закончившимся, ния t„ ПП (фиг. 3).
лирования А
мин
при котором время лирования А
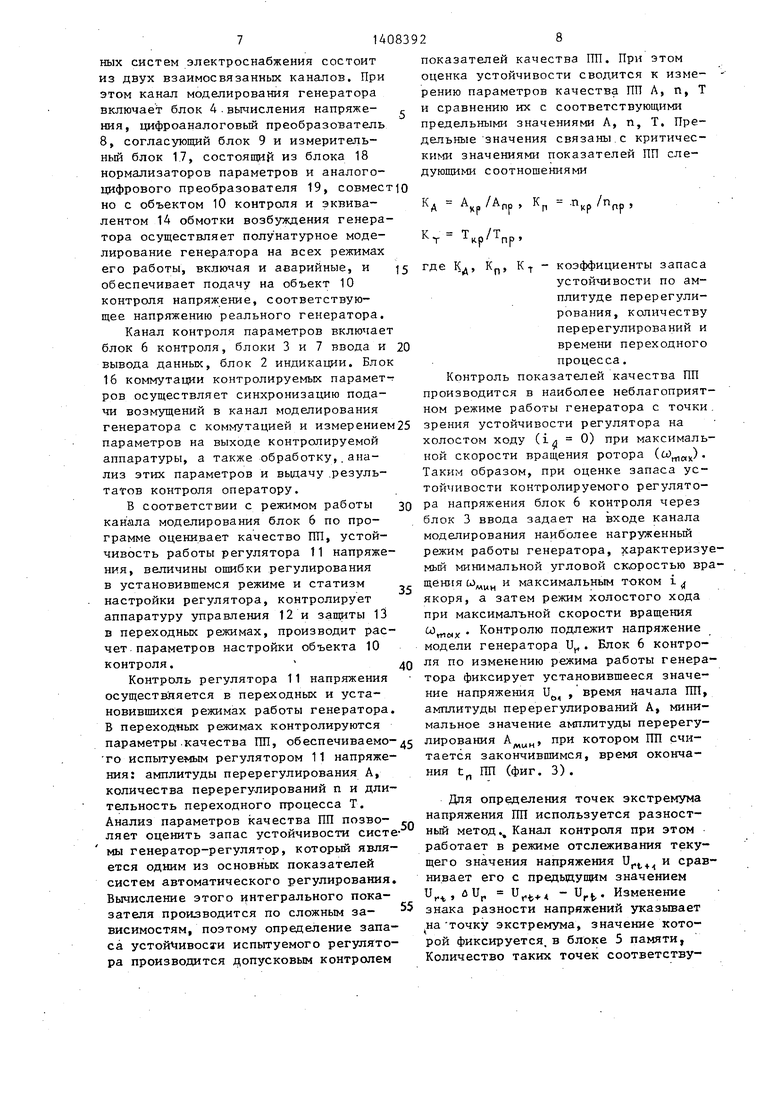
Для определения точек экстремума напряжения ПП используется разностный метод . Канал контроля при этом . работает в режиме отслеживания текущего значения напряжения U и сравнивает его с предьдущнм значением
лирования А
и., ли и,
- и.. Изменение
знака разности напряжений указьгоает на точку экстремума, значение которой фиксируется, в блоке 5 памяти, Количество таких точек соответствует количеству п перерегулирований ПП.
Аьшлитуда перерегулирования определя|ется как разность по абсолютной ве|личине напряжений экстремальных точек ди является величиной
ошибки регулирования, а знак указыпряжения при различных токах якоря U(i). Разность номинального и теку щего значений напряжений генератора
и, и значения установившегося напряжения Up , А 1- /и, - Uo4 . Время
вает на положительность или отрицательность статизма настройки регулятора (фиг. 5).
окончания переходного процесса опре- целяется при А,- глцп Тогда длительность ПП равна Т t - tр. Получен- ные показатели ПП А, п, Т сравниваются блоком 6 с предельными значе- «иями , , величины которых хранятся в блоке 5, тем самым определяется устойчивость регулятора 11 налряжения.
Темп времени моделирования генератора и контролй показателей качества И регламентируется теоремой Котель- иикова, устанавливающей эквивалент- iroCTb непрерьгеного и дискретного сигналов с точки зрения той информации, которая в них содержится. Таким образом, измерение i и U, производит- ся с частотой, минимум вдвое превы- ггающей частоту колебаний ПП модели- jiyeMoro генератора. Для генераторов постоянного тока частота ПП при длительности 0,3-0,5 с и количестве пе- 5 ерегулирований 5-6 составл-яет 6- 10 Гц.
Блок 6 через блок 7 вывода данных попеременно подает управляющие сигналы на блок 16 коммутации для подклю
чения сигналов пропорциональных ij и Uf, , с выхода блока 18 нормализаторов
а вход аналого-цифрового преобразр- в{ателя 19, причем считывание преоб- р азованного в цифровой параллельный к|од Uf, из блока 3 блоком 6 контроля п|роисходит в моменты, когда блок 4 у|ке произвел считывание ig и присту- пИл к вычислению напряжения модели- р|уемог6 генератора.
Алгоритм контроля параметров ка- ПП, обеспечиваемого контроли- регулятором напряжения, при- в|еден на фиг. 4.
В установившемся режиме опреде- л|1ется ошибка регулирования и ста- Т.ЙЗМ настройки регулятора 11 напря- . С задающего устройства 1 зада ейрся режим контроля. Блок 6 контроля блоки 7 и 3 подает на блок 4 )Гчисления напряжения значения тока я |соря ifl от О до значение обо рфтов ,ц . При этом блок 6 фиксиру- е значение номинального напряжения генератора и отслеживает значения на
ди является величиной
пряжения при различных токах якоря U(i). Разность номинального и текущего значений напряжений генератора
05
0
вает на положительность или отрицательность статизма настройки регулятора (фиг. 5).
Технология контроля регуляторов напряжения предусматривает операции по их-настройке. Настройка регуляторов напряжения генераторов постоянного тока производится регулировоч- ным винтом, изменяющим величи«у зазора между якорем и сердечником электромагнита регулятора. Зависимость напряжения генератора от оборотов регулировочного винта приведена на фиг. 6, где вьиелены характерные участки: А-А - рабочий участок регулятора с мембранной пружиной, А - Б - участок неустойчивой работы, Б -Б - рабочий участок регулятора с 5 лепестковой пружиной В рабочих зонах находятся точки настройки регуляторов Н и Н . Регулировка регуляторов напряжения производится в наиболее неблагоприятном для регулятора режиме работы генератора ijj O,W«O,KC который задается блоком 6 через блоки 7 и 3 на вход канала моделирования. При этом блок 6 отслеживает те- кущее значение напряжения U и и фиксирует характеристические точки зависимости U и Ug/) . По значениям напряжений точек А и А (Б и Б) определяется напряжение точки настройки регулятора Н (Н )
0
5
и.
K(UA + V,,)/2
Значение коэффициента К устанавливается для каждого типа регулятора. Значения напряжений точек А и А (Б и Б ) позволяют количественно оценить регулировочный Sanac и однозначно установить точку настройки регулятора. Оператору при настройке регуляторов блок 6 через блок 7 выдает на блок 2 индикаци и напряжение точки настройки и и величину отклонения те кущего напряжения ЛИ ot точки настройки.
Алгоритм настройки регуляторов напряжения представлен на фиг. 7.
В системах электроснабжения аппаратура управления работой генератора
осуществляет подключение генератора к бортсети, когда его напряжение превышает напряжение бортсети, отключение генератора от бортсети, когда его напряжение стало меньше напряжения сети, обеспечивает невозможность включения генератора с неправильной полярностью. Согласно перечисленным функциям блок 6 контроля реализует
алгоритм контроля аппаратуры 12 управления .
Контроль подключения генератора к имитатору 15 бортсети осуществляется следующим образом.
С задающего устройства 1 задается начальный адрес программы контроля аппаратуры. Блок 6 контроля через блок 3 ввода данных считывает эту ин
формацию, инициализирует адрес программы в блоке 5 памяти и в соответствии с программой задает через блоки 3 и 7 на вход блока 4 вычисления напряжения генератора угловую скорость вращения, возрастающую от О до максимальных значений при токе якоря О (i 0,0) ). При повышении угловой скорости вращения напряжение моделируемого генератора и. также возрастает и при превьпшении напряжения бортсети U аппаратура под ключает канал моделирования к имитатору 15 бортсети. При этом блок 6 через блок 7 управляет коммутацией блока 16 и контролирует через блоки 19 и 3 напряжения генератора U И §орт- сети U(., а также величину разности
ли Up - и.
Контроль отключения генератора от бортсети производится в обратном по- рядке.
Блок 6 снижает угловую скорость вращения и на входе канала моделирования, что приводит к снижению величины напряжения генератора и появле- нию обратного тока в цепи бортсеть - генератор. При определенной величине обратного тока аппаратура управления отключает генератор от имитатора 15 бортсети. Блок 6 коммутирует при пом щи блока 16 и контролирует сигналы пропорциональные величинам обратного тока 1д,вр напряжениям генератора U и бортсети Uj. (фиг. 8) .
При контроле аппаратуры управле- ния в случае неправильной полярности подключения генератора генераторные клеммы согласующего блока 9 переполю0
5
0
5 0 . с
0
5 д
совываются и на вход аппаратуры управления и защиты подается напряжение обратной полярности. Канал контроля параметров совместно с регулятором напряжения работает без изменений. Канал контроля параметров производит контроль подключения генератора к имитатору бортовой сети. Алгоритм контроля аппаратуры управления при неправильной полярности подключения генератора приведен на фиг. 9.
Аппаратура защиты осуществляет функции защиты бортовой сети от ава- рийньгх режимов работы генератора, отключая аварийный генератор от бортсети. Вместе с тем аппаратура защиты не должна срабатывать при кратковременных выходах параметров генератора за номинальные значения, связанных с переходными режимами его работы. Таким образом, проводить испытание и контроль аппаратуры защиты, которая работает совместно с аппаратурой управления, необходимо в переходных режимах работы канала моделирования генератора совместно с регулятором напряжения.
Аппаратура защиты сети систем электроснабжения постоянного тока производит отключение генератора от бортовой сети при устойчивых перенапряжениях, превышающих номинальное напряжение генератора. Зависимость времени срабатывания аппаратуры защиты от величины перенапряжения ге-. нератора представлена на фиг. 11.При контроле аппаратуры 13 защиты осуществляется контроль времени ее срабатывания от величины напряжения генератора в соответствии с зависимостью, приведенной на фиг. 11. Чтобы исключить повреждение регулятора 11 напряжения повышенным напряжением при моделировании аварийных режимов, регулятор напряжения совместно с эквивалентом 14 обмотки возбуждения отключается от генераторных клемм согласующего блока 9. При этом блок 6 контроля через блоки 7 и 3 вьщает на вход блока 4 вычисления напряжения значение тока возбуждения ij, соответствующего аварийному режиму. Блок 4 производит вычисление напряжения ге- нератора, которое через блок 7 вывода данных, цифроаналоговый преобразователь 8 и согласующий блок 9 поступает на вход аппаратурыу управления
12 и защиты 13, Контроль срабатывания элементов аппаратуры защиты 13 и управления 12 осуществляется измереи.
и,. Алгоритм
нием напряжений U, uj, uy, контроля аппаратуры запр1ты сети представлен на фиг. 10,
Форму, ла и зобрет-екия
Устройство для контроляаппарату- ры генераторов автономных систем элетроснабжения, содержащее блок вычисления напряжения генератора, задающее устрйоство, измерительный блок и согласующий блок, отличающееся тем, что, с целью повышения достоверности и расширения функциональных возможностей,- в него введены блок-контрОЛЯ, блок шздикации.
блоки .ввода и вывода данных, блок па- 20 РОВ, а четвертая - с входной шиной мяти, цифроаналоговый преобразователь блок коммутации параметров,эквивалент обмотки возбуждения генератора, имитатор бортовой сети,,при этом измерительный блок содержит блок нормализа- 25 торов параметров и аналого-цифровой I преобразователь, причем выходная шина задающего устройства соединена с первой входной шиной блока ввода данных, вторая входная шина которого соединена -с выходной шиной аналого- цифрового преобразователя, вход которого соединен с выходом блока коммутации параметров, вход которого соединен с выходом блока нормализаторов параметров, первый вход которого соединен с клеммой для подключения первого выхода аппаратуры управления объ
30
35
цифроаналогового преобразователя, в ход которого соединен с входом согл сующего блока-, выход которого соеди нен с клеммами для подключения входов объекта контроля, клемма для по ключения выхода регулятора напряжения объекта контроля соединена с вх дом эквивалента обмотки -возбуждения генератора, выход которого соединен с вторым входом блока нормализаторо параметров, третий вход которого со динен с. выходом имитатора бортовой сети, вход которого соединен с клем мой для подключения второго выхода аппаратуры управления объекта контроля, четвертьй вход - с клеммой дл подключения первого выхода аппарату ры защиты объекта контроля, пятьй - с выходом согласующего блока.
екта контроля, а третья входная Шина
д 5
блока ввода данных соединена с первой выходной шиной блока вывода данных, первая выходная тина блока ввода данных соединена с входной шиной блока контроля, вторая - с входной шиной блока вьиисления напряжения, выходная шина которого соединена с перйой входной щиной блока вывода данных, вторая входная шина которого соединена с выходной шиной блока контроля-, первая и вторая шины данных блока памяти соединены с шиной данных блока вычисления напряжения и шиной данных блока контроля соответственно, вторая выходная шина блока вьшода данных соединена с входной ши- игщикации, третья - с входной шиной блока к оммутащи параметРОВ, а четвертая - с входной шиной
цифроаналогового преобразователя, выход которого соединен с входом согласующего блока-, выход которого соединен с клеммами для подключения входов объекта контроля, клемма для подключения выхода регулятора напряжения объекта контроля соединена с входом эквивалента обмотки -возбуждения генератора, выход которого соединен с вторым входом блока нормализаторов параметров, третий вход которого соединен с. выходом имитатора бортовой сети, вход которого соединен с клеммой для подключения второго выхода аппаратуры управления объекта контроля, четвертьй вход - с клеммой для подключения первого выхода аппаратуры защиты объекта контроля, пятьй - с выходом согласующего блока.
/(ЦП IS
sums
ffr
Vn,
JL
Вычисление тгнат ной aa/nura Ф
fsm
вычие/ енае Ur (вен 4/
JL
tuBoS значении HaitflfiftHUJi Or {бВыв n
foar /4
SHti
%r
(POli
fusetntumoji atef eimma HOfinfaAu PH S tsmftotafaejniianf exietnajfM memfaviv/i tt
iff
,m№.e
С
Нача/rff
JL
3 Измерение и запись 8 ОЗУ l/f а {/(„
гJL
Е- намз разноста (/Ut.,-Ut
Г
Запись б ОЗУ U.,l/,,)
5- Ut, peoe/iSHa ,
нализ бе/ ичины регдли.р. запаса 1 и,
г-п- Сравни6ате значения VH с расчетным
±
// Нндакаиия 0
L
fua.7
( квнеи
С
Начало
Г
1
Побышаен Vf
нет
9us. д
-д -«
I 4ПР соотбетсаЛат ТУ. Ми/гвщия
с
Нача/10
1
I
Подк/1юченае. СВ 9
с нЕпрабильноИ
полярностью
i
Повышаем Uf до Uf,Uc
r-J
Индикация оператору
С
I
Конец ipuB.S
nem sЧ а,. W )
5
0,5//.JIг.5 « tc,
ue.tl
С
Начало
Устанадмбае Vr Uri fi-f.ZMS...}
7
fuKctipuen УГ и брепя срао. /13П te.
JL
Дналаз te Hi fcpi 81
Л Индикация Uri. tei I копнгнтарий
| Стенд для испытаний автономной электроэнергетической системы | 1977 |
|
SU684471A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стенд для испытаний автономной электроэнергетической системы | 1979 |
|
SU773541A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
