1U
Изобретение относится к области sneKTpOTexiiHKH, в частности к исполнительным электродвигателям с воз- бз 1кдением от постоянных магнитов я с
I ограниченным углом поворота ротора, которые находят широкое применение в претензионных следящих системах с высокими дин 1мическими характеристиками.
I Цель изобретения - повышение энерIгетических и динамических характеI ристик.
На фиг.1 представлена конструктив
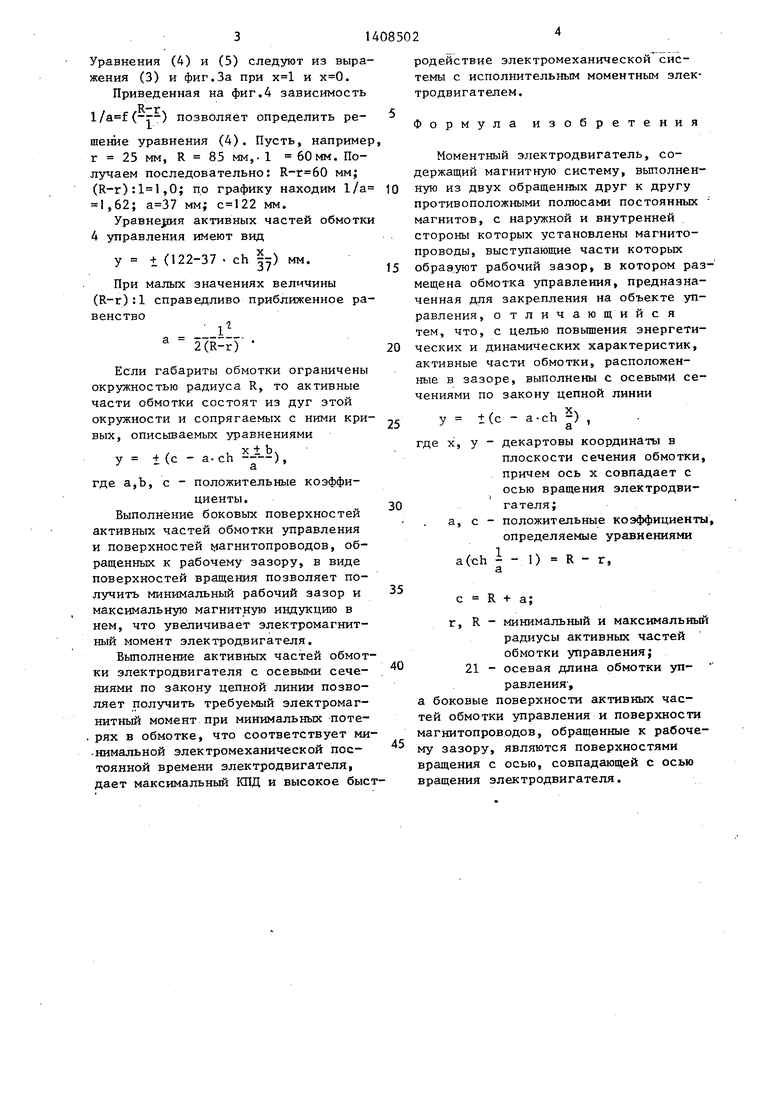
ная.схема электродвигателя, общий ВИД1 на фиг,2 - электродвигатель, вид сверху; на. фиг,3 - форма половины обмотки без ограничения ее габаритов (а) и с ограничением костью радиуса R (б); на фиг.4 - зависимость величины 1/а от величины (R-r)l.
Электродвигатель содержит магнитную системуд вьтолненную из обращен ных друг к другу противоположными полюсами постоянных магнитов ,1, внутренних 2 и наружных 3 магнитопрово- дов, разделенных; рабочим возду/лньм зазором в котором размещена подвижная обмотка 4 управления, закреплен- ная-на объекте 5 управления.
Электродвигатель (фиг,2) показан с удаленными объектом 5 управления и каркасом обмотки 4 управления.
Электродвигатель работает следую- цим образом.
I Постоянные магниты I создают В рабочем воздушном зазоре магнитное Ьоле. Боковые поверхности активньи (частей обмотки управления- и поверх- IHOCTH магнитоп роводов 2 и 3, обращенные к рабочему зазору, являются по- (ерхностями вращения с осьюз совпадающей с вращения электродвигателя. При пропускании по обмотке 4 управления электрического тока возникает электромагнитный момент, под Действием которого объект 5 управле- Лгая поворачивается на определенньш УГОЛ либо перемещается по требуемому закону.
Электромагнитный момент электродвигателя определяется равенством
S P-dla,
Ей
где В л - магнитная индукция в рабочем зазоре; I - ток в обмотке; W - число витков обмотки;
М
2В IW
р - расстояние от точки активной части обмотки до оси вращения; 1а - дуга одной активной части
обмотки;
dla - элемент дуги 1а, Введем в плоскости сечения обмотки декартову систему координат хОу, причем ось X совпадает с осью вращения электродвигателя. Выражение для электромагнитного меомента примет вид: J
М KI J у {Т+у dx,
- где 21 - осевая длина обмотки- 4 управления;у , - производная от функции
(х). описывающей одну активную часть обмотки 4 управления .
Наивысшие энергетические и динамические характеристики электродвигателя достигаются при выполнении условий {
dx
max,
dx la const,
Тое« условий получения максимального электромагнитного момента при фиксированной длине активной части обмотки,
Изопериметрическая задача (1), (2) имеет решение з виде уравнения цепной линии
d + а
, х-Ь
ch
а
где а,Ъ,с - константы.
При отсутствии ограничений на габариты электродвигателя и фиксированной длине витка обмотки получаем уравнения активных частей обмотки
X
± (c-a-ch ). а ,
(3)
где а, с - положительные коэффициенты (фиг.За). Их значения могут быть определены с помощью уравнений
a(ch ; -I) R-r, (4)
а
С R + а,(5)
где г, R минимальный и максимальный радиусы активной часг ти обмотки 4 управления; 21 - осевая длина обмотки 4 управления.
Уравнения (4) и (5) следуют из выражения (3) и фиг.За при и . Приведенная на фиг.4 зависимость
(-r-) позволяет определить ре-
ш81Ше уравнения (4). Пусть, например г 25 мм, R 85 мм,. 1 60мм. Получаем последовательно: мм; (R-r),0; по графику находим 1/а 1,62; мм; мм.
Уравнения активных частей обмотки 4 управления имеют вид
у ± (122-37 . ch ) мм.
При малых значениях величины (R-r):l справедливо приближенное равенство
1 2(R-r)
а
Если габариты обмотки ограничены окружностью радиуса R, то активные части обмотки состоят из дуг этой окружности и сопрягаемых с ними кривых, описьшаемых уравнениями
у i (с - а. ch ),
3
где а,Ь, с - положительные коэффициенты.
Выполнение боковых поверхностей активных частей обмотки управления и поверхностей магнитопроводов, обращенных к рабочему зазору, в виде поверхностей вращения позволяет получить минимальный рабочий зазор и максимальную магнитную индукцию в нем, что увеличивает электромагнитный момент электродвигателя.
Вьтолнение активных частей обмотки электродвигателя с осевыми сечениями по закону цепной линии позволяет получить требуемый электромагнитный момент при минимальных поте- рях в обмотке, что соответствует ми- кимальной электромеханической постоянной времени электродвигателя, дает максимальный КПД и высокое быстродействие электромеханической системы с исполнительным моментным электродвигателем.
Формула изобретения
Моментный электродвигатель, содержащий магнитную систему, вьтолнен- ную из двух обращен1п 1х друг к другу противоположными полюсами постоянных магнитов, с наружной и внутренней стороны которых установлены магнито- проводы, выступающие части которых образуют рабочий зазор, в котором раз мещена обмотка управления, предназначенная для закрепления на объекте управления, о тличающийся тем, что, с целью повышения энергетических и динамических характеристик, активные части обмотки, расположенные в зазоре, выполнены с осевыми сечениями по закону цепной линии
5
0
У где X
±(с - a-ch -)
а у - декартовы координаты в
плоскости сечения обмотки, причем ось X совпадает с осью вращения электродвигателя;
а, с - положительные коэффициенты, определяемые уравнениями
a(ch i - 1) R - г, а
с R + а;
г, R - минимальный и максимальный радиусы активных частей обмотки управления; 21 - осевая длина обмотки управления ,
а боковые поверхности активных частей обмотки управления и поверхности магнитопроводов, обращенные к рабочему зазору, являются поверхностями вращения с осью, совпадающей с осью вращения электродвигателя.
-К -I
1 К X
i/a J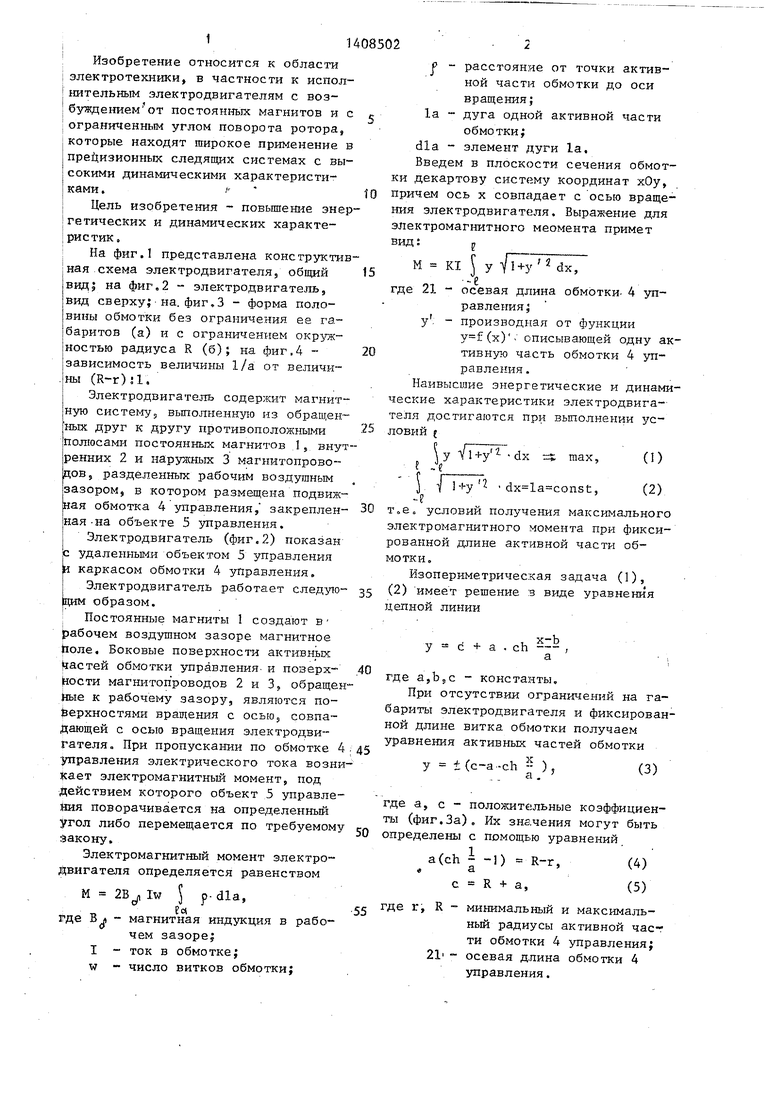
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366064C1 |
| ОДНОФАЗНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2010 |
|
RU2453968C2 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829315C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829312C1 |
| Вентильный электродвигатель | 1983 |
|
SU1480047A1 |
| Вентильный электропривод | 1990 |
|
SU1758788A1 |
| ОБРАЩЕННАЯ СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2024 |
|
RU2829489C1 |
| Моментный электродвигатель с малым углом поворота ротора | 1984 |
|
SU1203653A1 |
| Электродвигатель | 1978 |
|
SU748702A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
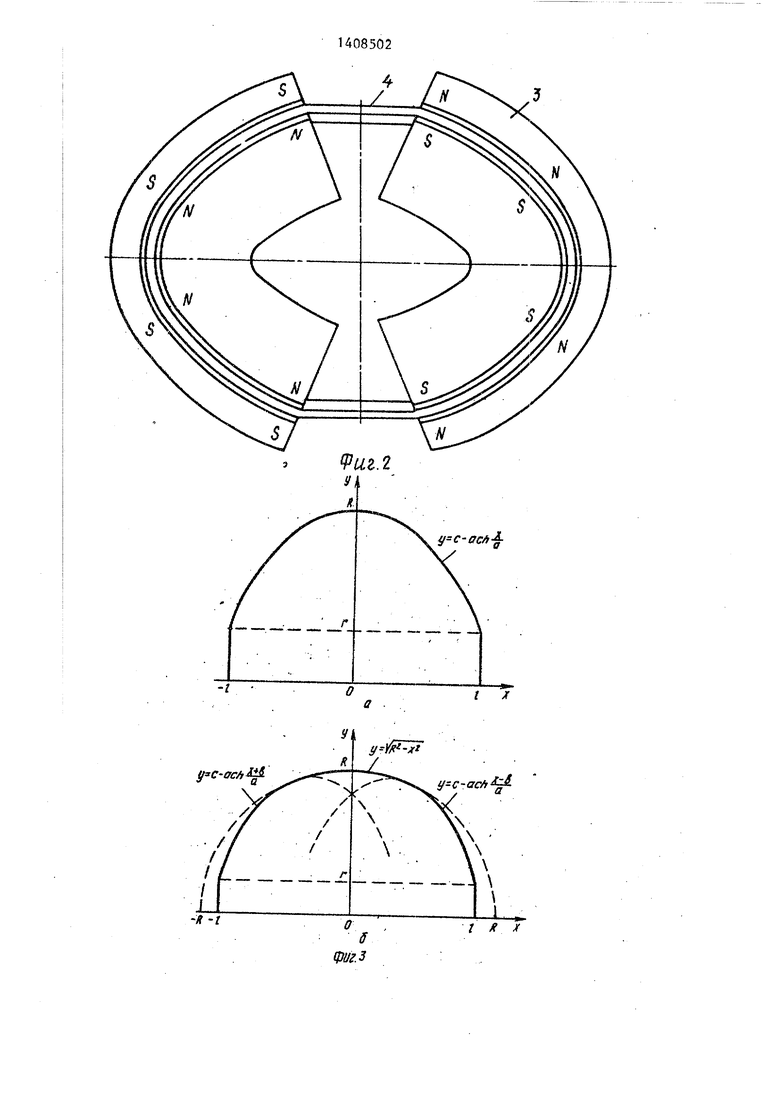

Изобретение относится к электромашиностроению. Цель изобретения - повышение энергетических и динамических характеристик. Электродвигатель содержит магнитную систему, состоящую из обращенных друг к другу противоположными полюсами постояниьпс магнитов 1, внутренних 2 и наружных 3магнитопроводов, разделенных рабочим воздушным зазором, в котором размещена подвижная обмотка 4 управления , закрепленная на объекте 5 управления . Благодаря выполнению осевых сечений активных частей обмотки по закону цепной линии получается электромагнитный момент при минимальных Потерях в обмотке, что соответствует минимальной электромеханической постоянной времени электродвигателя. 4ил. % (Л 00 ел О 1C фцг.Г
1 игЛ
2 ±r i
| Розов Б,С | |||
| и др | |||
| Измерительные сканирующие приборы | |||
| - М.: Мапшно- строение, 1980, с.130 | |||
| Моментный электродвигатель с малым углом поворота ротора | 1984 |
|
SU1203653A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
