Изобретение относится к электротехнике, конкретно к линейным двигателям переменного тока, и может быть использовано в электромеханических системах с поступательным движением.
Известен электродвигатель, содержащий магнитопровод статора, обмотку якоря, ярмо статора, кольцевые постоянные магниты, намагниченные радиально, ротор и ходовой элемент в виде полого цилиндра с резьбой на наружной поверхности. Ротор имеет две магнитные гайки в виде полых цилиндров с когтеобразными выступами, образующими чередующиеся полюса (а.с. СССР № 1410215, МКИ 4 Н02К 41/02, 7/06, БИ № 26, 15.07.88) - [1].
Недостатком известного двигателя являются низкие массо-габаритные показатели, связанные с наличием паразитного воздушного зазора и с малым значением магнитной индукции в магнитных гайках, а также значительным расстоянием между ними.
Наиболее близким к заявленному электродвигателю по составу и функциональным признакам является шаговый электродвигатель, имеющий два пакета статора с обмотками управления, ротор с двумя магнитопроводами, имеющими резьбу на внутренней цилиндрической поверхности, кольцевой постоянный магнит в виде полого цилиндра, намагниченный аксиально и размещенный между магнитопроводами ротора, и лайнер в виде полого ферромагнитного цилиндра, имеющего резьбу на наружной поверхности (а.с. СССР № 1427514, МКИ 4 Н02К 41/03, БИ № 36, 30.09.88) - [2].
Его недостатком являются низкие массо-габаритные показатели, связанные с большим магнитным потоком, замыкающимся через магнитный лайнер, имеющий большое поперечное сечение, с большим радиальным размером кольцевого постоянного магнита, создающего поток возбуждения для двигателя вращательного движения и для преобразователя движения "гайка-винт", а также с наличием паразитных воздушных зазоров и большим расстоянием между магнитопроводами ротора.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в улучшении массогабаритных показателей линейного электродвигателя.
Технический результат достигается тем, что в линейный электродвигатель, содержащий шихтованный магнитопровод статора, на котором имеется многофазная обмотка, ротор, имеющий кольцевой постоянный магнит, расположенный между двумя магнитопроводами с резьбой на внутренней цилиндрической поверхности, ферромагнитный лайнер с резьбой на наружной цилиндрической поверхности, имеющий возможность поступательного движения, введены третий и четвертый магнитопроводы, имеющие резьбу на внутренней цилиндрической поверхности, а между ними соосные второй и третий кольцевые постоянные магниты, примыкающие к первому и второму магнитопроводам соответственно, которые имеют клювообразные зубцы, обращенные к внутренней цилиндрической поверхности шихтованного магнитопровода статора, причем все постоянные магниты намагничены в осевом направлении встречно, а магнитопроводы и ферромагнитный лайнер имеют резьбу с одинаковым шагом на внутренней и на наружной цилиндрических поверхностях соответственно.
Сущность заявленного изобретения поясняется на Фиг.1-3, где:
Фиг.1 - конструктивная схема электродвигателя;
Фиг.2 - контурная схема сечения электродвигателя с тремя постоянными магнитами, выполненная в относительных единицах;
Фиг.3 - контурная схема сечения электродвигателя с тем же осевым усилием и с одним постоянным магнитом, выполненная в относительных единицах (прототип).
Здесь: 1 - многофазная обмотка, 2 - шихтованный магнитопровод, 3 - корпус, 4 - фланец, 5 - постоянные магниты, 6 - два магнитопровода с клювообразными зубцами 7, 8 - магнитопроводы, 9 - два радиально-упорных подшипника, 10 - две опорные немагнитные втулки, 11 - ферромагнитный цилиндрический лайнер.
Шихтованный магнитопровод статора 2 имеет многофазную обмотку 1 и крепится к корпусу 3, соединенному с фланцем 4. Три высококоэрцитивных постоянных магнита 5 закреплены между четырьмя магнитопроводами: второй постоянный магнит расположен между магнитопроводами 6, имеющими клювообразные зубцы 7, первый и третий постоянные магниты закреплены с торцов магнитопроводами 8. Немагнитные втулки 10 крепятся к магнитопроводам 8 и вращаются на подшипниках 9. Магнитопроводы 6, 8 и ферромагнитный лайнер 11 имеют резьбу с одинаковым шагом на внутренней и на наружной цилиндрических поверхностях соответственно.
Магнитный поток, созданный средним постоянным магнитом 5, замыкается по двум путям. Часть потока идет по магнитопроводам 6 радиально к периферии, к зубцам 7, преодолевает рабочий воздушный зазор, проходит через зубцы шихтованного магнитопровода 2 и замыкается через спинку статора. Вторая часть магнитного потока среднего постоянного магнита 5 проходит через магнитопроводы 6 радиально в сторону лайнера, через выступы резьбы, преодолевает рабочий воздушный зазор и замыкается через лайнер 11.
Магнитные потоки, созданные крайними постоянными магнитами 5, идут радиально через магнитопроводы 6 и 8 в сторону лайнера, через выступы резьбы, преодолевают рабочий воздушный зазор и замыкаются через лайнер 11.
Электродвигатель работает следующим образом. При подаче на обмотку 1 статора двух или трехфазной системы напряжений возникает вращающееся магнитное поле. Оно взаимодействует с клювообразными зубцами 7, которые представляют собой полюса с чередующейся полярностью. В результате ротор, содержащий постоянные магниты 5 и магнитопроводы 6, 8, вращается синхронно с магнитным полем статора. При этом резьба на внутренних цилиндрических поверхностях магнитопроводов 6, 8 смещается относительно резьбы на поверхности лайнера 11, который может перемещаться поступательно вдоль оси вращения ротора. Появляется осевое усилие, действующее на лайнер 11, который приводит в движение исполнительный механизм.
Скорость движения лайнера определяется формулой
 ,
,
где h - шаг резьбы; p - число пар полюсов, образованных зубцами 3; ω - угловая частота питающего напряжения; f - циклическая частота питающего напряжения.
Для подтверждения эффективности предлагаемого электродвигателя приведем формулы для осевого усилия:
 ,
,
где Uδ - магнитное напряжение на рабочем воздушном зазоре между лайнером и магнитопроводами; Λ - магнитная проводимость зазора; x - перемещение лайнера; µ0 - магнитная постоянная; d - средний диаметр по воздушному зазору; n - количество витков резьбы в зоне магнитного поля; δ - длина воздушного зазора; Bδ - магнитная индукция в зазоре; h - шаг резьбы; S - площадь поверхности с магнитным полем в зазоре; Φ - суммарный магнитный поток, проходящий через зазор. Из последних формул видно, что осевое усилие при выбранных значениях магнитной индукции, зазоре и шаге резьбы определяется площадью, через которую проходит магнитный поток в зазоре, или величиной этого потока.
Рассмотрим контурные схемы сечения электродвигателя с тремя постоянными магнитами (Фиг.2) и электродвигателя с одним магнитом (Фиг.3.).
Предположим, что магнитный поток, созданный средним постоянным магнитом, делится пополам между потоком, проходящим через пакет статора, и потоком, проходящим через лайнер. Суммарный магнитный поток трех постоянных магнитов на Фиг.2 равен магнитному потоку постоянного магнита на Фиг.3. Видно, что боковые постоянные магниты создают магнитный поток в лайнере в 2,5 раза меньше, чем в случае двигателя с одним магнитом. Следовательно, массивная часть лайнера (без резьбы) имеет площадь поперечного сечения, в 2,5 раза меньшую, чем у лайнера по Фиг.3, где весь магнитный поток, создающий усилие, проходит через одно поперечное сечение лайнера. Во столько же раз меньше объем и масса части лайнера, лежащей вне активной длины электродвигателя.
Диаметр массивной части лайнера по Фиг.2 меньше, чем эта величина по Фиг.3, в 1,58 раза. Далее, торцевая площадь одного постоянного магнита на Фиг.2 в три раза меньше, чем у постоянного магнита на Фиг.3. Следовательно, наружный диаметр магнитопровода статора на Фиг.2 значительно меньше, чем эта величина на Фиг.3. Следует признать, что поскольку средний диаметр по зазору у электродвигателя по Фиг.3 больше, то при том же осевом усилии его активная длина несколько меньше.
Электродвигатель на Фиг.2 имеет наружный радиус активной части 76 мм и активную длину 95 мм, что дает объем цилиндра 1723853 мм3 = 1724 см3.
Электродвигатель на Фиг.3 имеет наружный радиус активной части 105 мм и активную длину 65 мм, что дает объем цилиндра 2251342 мм3 = 2251 см3.
Отношение объемов цилиндров, соответствующих двигателям по Фиг.2 и Фиг.3, имеет значение
2251342/1723853=1,306,
т.е. предлагаемый электродвигатель занимает объем на активной длине в 1,3 раза меньше, чем электродвигатель с одним постоянным магнитом. Если учесть отсутствие у предлагаемого электродвигателя паразитных зазоров, то массогабаритные показатели значительно улучшатся по сравнению с прототипом.
Следует признать, что у предлагаемого двигателя постоянные магниты расположены на роторе, что увеличивает его момент инерции и несколько снижает динамические характеристики.
Отметим, что радиально-упорные подшипники 9 воспринимают осевое усилие, которое создает исполнительный механизм, приводимый в движение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный электродвигатель | 1987 |
|
SU1515278A1 |
| Электродвигатель | 1985 |
|
SU1410215A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366066C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ | 2008 |
|
RU2375807C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2008 |
|
RU2375806C1 |
| Электродвигатель | 1986 |
|
SU1515277A1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2012 |
|
RU2499343C1 |
| Электрическая машина с модульными зубцами статора и обмотками из сверхпроводникового материала | 2020 |
|
RU2747884C1 |
| Синхронный электродвигатель для винта вертолета | 2019 |
|
RU2708382C1 |
| Синхронный электродвигатель с магнитной редукцией | 2017 |
|
RU2668817C1 |
Изобретение относится к электротехнике, к линейным двигателям переменного тока, и может быть использовано в электромеханических системах с поступательным движением. Технический результат заключается в улучшении массогабаритных показателей. Электродвигатель содержит шихтованный магнитопровод статора 2, с расположенной на нем многофазной обмоткой 1, и крепящийся к корпусу 3. Фланец 4 соединен с корпусом. Ротор имеет три кольцевых постоянных магнита 5, расположенных между двумя магнитопроводами 8. Два магнитопровода 6 имеют клювообразные зубцы 7, обращенные к внутренней цилиндрической поверхности шихтованного магнитопровода 2 статора. Немагнитные втулки 10 крепятся к боковым магнитопроводам и вращающаются в подшипниках 9. Ферромагнитный лайнер 11 имеет возможность поступательного перемещения вдоль оси вращения ротора. Все постоянные магниты 5 намагничены в осевом направлении встречно. Магнитопроводы 6, 8 и ферромагнитный лайнер 11 имеют резьбу с одинаковым шагом на внутренней и на наружной цилиндрических поверхностях соответственно. 3 ил.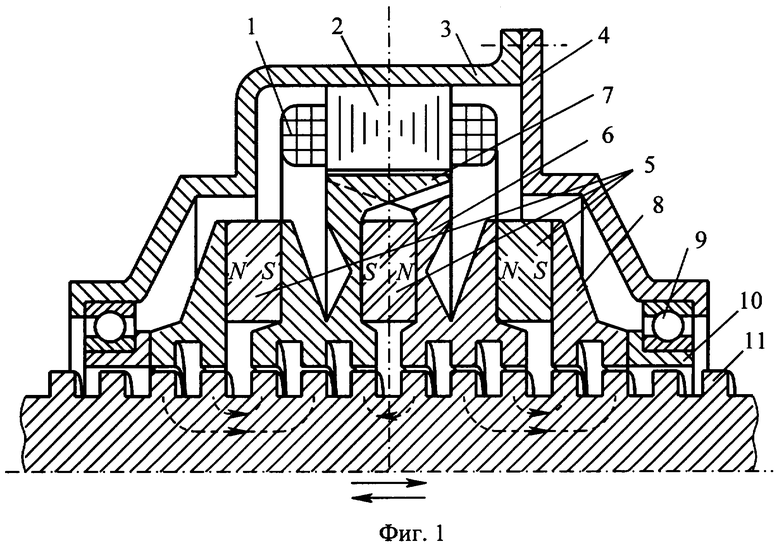
Линейный электродвигатель, содержащий шихтованный магнитопровод статора, на котором имеется многофазная обмотка, ротор, имеющий кольцевой постоянный магнит, расположенный между двумя магнитопроводами с резьбой на внутренней цилиндрической поверхности, ферромагнитный лайнер с резьбой на наружной цилиндрической поверхности, имеющий возможность поступательного движения, отличающийся тем, что в ротор введены третий и четвертый магнитопроводы, имеющие резьбу на внутренней цилиндрической поверхности, а между ними соосные второй и третий кольцевые постоянные магниты, примыкающие к первому и второму магнитопроводам соответственно, которые имеют клювообразные зубцы, обращенные к внутренней цилиндрической поверхности шихтованного магнитопровода статора, причем все постоянные магниты намагничены в осевом направлении встречно, а магнитопроводы и ферромагнитный лайнер имеют резьбу с одинаковым шагом на внутренней и на наружной цилиндрических поверхностях соответственно.
| Шаговый электродвигатель | 1987 |
|
SU1647793A1 |
| Линейный электродвигатель | 1987 |
|
SU1515278A1 |
| Электродвигатель | 1985 |
|
SU1464265A2 |
| Шаговый электродвигатель | 1986 |
|
SU1495948A1 |
| Шаговый электродвигатель | 1985 |
|
SU1427514A1 |
| Электродвигатель | 1985 |
|
SU1410215A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU961059A1 |
| Линейный шаговый электродвигатель | 1979 |
|
SU807458A1 |
| Линейный шаговый электродвинатель | 1977 |
|
SU625291A1 |
| US 3777587 А, 11.12.1973. | |||

