может перемещаться по направляющей 5 относительно ЖТ и кинематически упруго с ним связан через центрирующие пружины 7, снабженные регулировочными гайками 15. При перемещении ЖТ по заксэну,определяемому профилем кулачка 4, в Г 6, имитирующем отдаленный от кулачка 4 койец технологической части ЖТ.2, в реальных.условиях, возбуждаются, упругие колебания. Перемещения Г 6 относительно ЖТ можно фиксировать стрелочным, указателем 10 по шкале относительных перемещений 14. Кроме того, перемещения Г 6 и ЖТ мож но фиксировать по шкале абсолютных перемещений 13,, расположенной на неподвижной стойке 1, и по показаниям стрелочных указателей 11 и 12, связанных соответственно с Г и ЖТ. 2 з«н. ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Учебный прибор по сопротивлению материалов | 1989 |
|
SU1668987A1 |
| Учебный прибор по физике В.А.Чернышева | 1985 |
|
SU1273976A1 |
| Лабораторная установка для исследования шарнирно-рычажного преимущественно кривошипно-ползунного механизма | 1985 |
|
SU1341670A1 |
| ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ДЕЙСТВИЯ КОРИОЛИСОВОЙ СИЛЫ ИНЕРЦИИ | 1991 |
|
RU2016420C1 |
| Учебный прибор по физике | 1987 |
|
SU1490683A1 |
| Учебный прибор по астрономии и географии | 1987 |
|
SU1464199A1 |
| ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ДЕЙСТВИЯ КОРИОЛИСОВОЙ СИЛЫ ИНЕРЦИИ | 1994 |
|
RU2078378C1 |
| Учебный прибор по физике | 1985 |
|
SU1300538A1 |
| Учебный прибор для демонстрации процесса растяжения | 1990 |
|
SU1720070A1 |
| ИМИТАТОР УПРАВЛЕНИЯ СЛЕДЯЩИМ ЗОЛОТНИКОМ | 1973 |
|
SU369048A1 |
Изобретение относится к учебным приборам по механике, физике, теории механизмов и машин Прибор позволяет повысить точность демонстрации путем учета упругости технологической части толкателя кулачкового Механизма. Жесткий толкатель (ЖТ) 2 снабжен имитатором технологической части, выпол ненным в виде груза (Г) 6, который ел 00 ел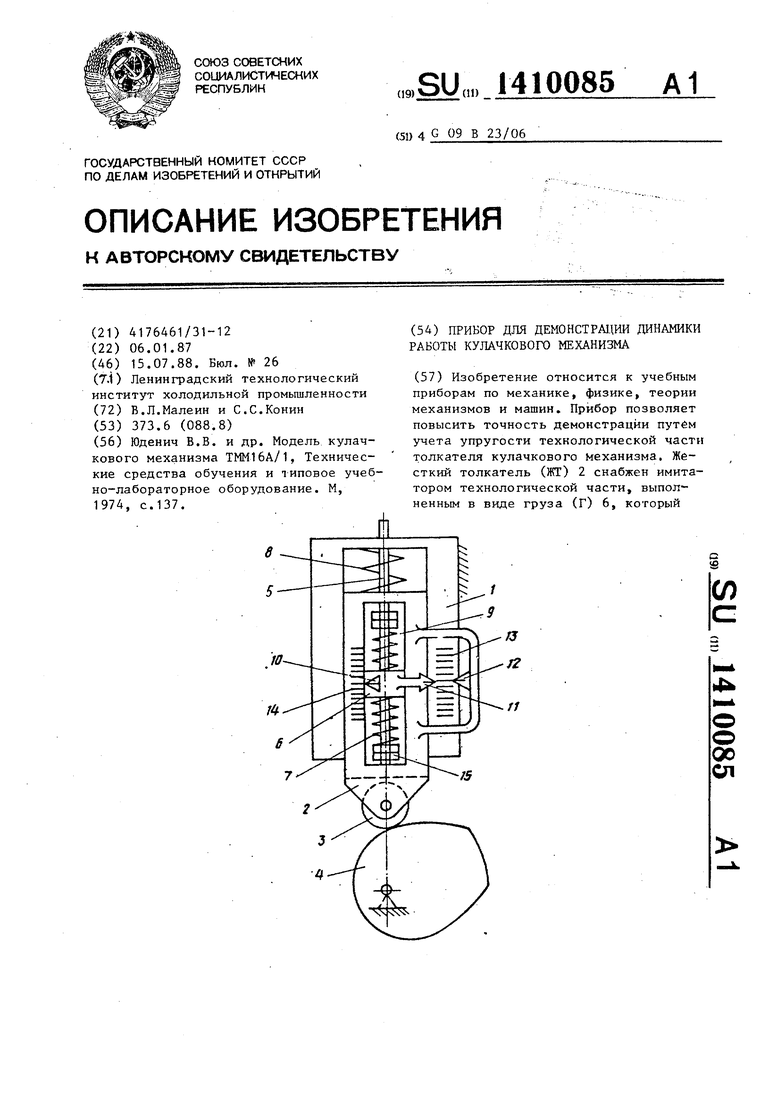
1
Изобретение относится к учебным приборам по физике, механике, теории машин и механизмов, в частности к демонстрационным приборам, позволяющим производить наглядную демонстра - цию эффекта рйботы кулачкового механизма с упругим толкателем.
Даль изобретения - повышение точности демонстрации путем учета упру- гости технологической части толкателя.
На чертеже представлен схематично предлагаемьш. прибор,
Прибор содержит установленный на стойке 1 с возможностью вертикального возвратно-поступательного перемещения подпружиненный толкатель 2 с роликом 3 на конце и .закрепленньм на стойке
1кулачок 4.
Прибор имеет имитатор технологической части толкателя 2, выполненный в виде установленного на направляющей 5. груза 6 и связанных с ним центрирующих пружин 7, При этом толкатель
2подпружинен посредством пружины 8 относительно стойки 1 и имеет паз 9, в котором расположены груз 6 и пружины 7 и 8.
6 и толкатель 2 имеют стре- лочные указатели 10, 11 и 12, а на поверхности стойки 1 и на толкателе 2 нанесены шкалы 13 и 14 соответственно абсолютных и относительных перемещений, груза 6.
Центрирующие пружины 7 имеют регу лирукицие их усилие гайки 15, связанные с направляющей 5.
Прибор работает следующим образом.
При вращении кулачка 4 через ролик
3перемещается толкатель 2.
j
0
5
п
5
0
Если ускорение толкателя 2 невели- .ко-(сила инерции, приложенная к грузу 6, меньше сил центрирующих пружин 7), груз 6 будет перемещаться вместе с V жестким толкателем 2 и стрелочный указатель 10 будет находиться против нулевой отметки на шкале 14 относительных перемещений. Показания стре- ло чных указателей 11 и 12 будут сов- падать, так как технологическая часть толкателя, выполненная в виде груза 6, и жесткий толкатель 2 в этом случае двинутся как единое целое.
Если ускорение толкателя 2 будет таким, что сила инерции, приложенная к грузу 6, будет больше сил, развиваемых центрирующими пружинами 7, груз 6 будет перемещаться по направляющей- 5, Перемещения груза 6 фиксируются стрелочным указателем 10 по шкале 14 относительных перемещений и стрелочным указателем 11 по шкале 13 абсолютных перемещений. При этом показания на шкале 13, фиксируемые стрелочными указателями 11 и 12, будут разные.
Величина рассогласования показаний стрелок 11 и 12, показывающих абсолютные перемещения технологической части толкателя, т,е„ груза 6 и жесткого толкателя 2, а также показания стрелочного указателя 10 по шкале 14, фиксирующего относительное перемещение груза 6 по отношению к жесткому толкателю 2, зависят от конструктивных параметров всей механической системы и ча стоты возбуждения (угловой скорости кулачка).
При перемещении жесткого толкателя 2 по закону, определяемому в со314
ответствии с профилем кулачка, в технологической части толкателя возбуж даются упругие колебания. Ускорение, скорость, перемещение груза 6, который имитирует второй отдаленный коне толкателя в реальных условия, с которого снимается движение, будут отличаться от ускорения, скорости и перемещения жесткого толкателя 2.
Дифференциальное уравнение движения груза 6 имеет вид:
ту С„(3-у),(1)
где Cj, - приведенный коэффициент же- сткости безынерционных цент рирующих пружин, Cf,2C (С - жесткость пружин 7); m - масса груза 6; S - перемещение жесткого толкателя 2; у - абсолютное перемещение груза 6,
Поделив обе части уравнения (1) на m и обозначив Сг, , получим
у К2 (S-y) ,(2)
где К - собственная частота консервативной колебательной системы.
Начальные условия для дифференциального уравнения (2) имеют следующи вид:
УО при
Пусть ускорение жесткого толкател 2 описывается косинусоидальным законом
c- i§4«a«
ri /
2t2
cos
где S
.yt.
(3)
ЛЛЯКС
- максимальное перемещение жесткого толкателя 2 (ход толкателя); t - время подъема (перемещения) толкателя 2,
Обозначим (T/t Uj,, где u) - угловал скорость кулачка 4. Тогда формул (3) запишется так:
2
с f Sjv4a.«c 2
cos (u)ct) .
Дважды проинтегрировав выражение (3), получим
,, ,0,5-0,5cos(Wet)l . (5) Подставив (5) ,в (2) перенеся в левую часть, получим
У+К2 y § fiei|CKi 1 os (t) . (6)
Выражение (6) является неоднород- ным дифференциальным уравнением второго порядка, общее решение-которого можно представить как
У У,. , (7) где у - общее решение однородного
дифференциального уравнения (правая часть уравнения (6) равна нулю);
у, - частное решение неоднородного дифференциального уравнения (с правой частью).
Общее решение однородного уравнения у+К у 0 имеет вид
y,A,sin(Kt)+B,cos(Kt), . (8) где А, и В, - некоторые постоянные.
Частное решение неоднородного уравнения с правой частью - гармонической функцией времени с постоянной составляющей - имеет вид
()()4--|- -,
(9)
где А и В - некоторые постоянные
коэффициенты.
Для определения коэффициентов Aj и В, подставим уравнение (9) в дифференциальное уравнение (2) и получим уравнение:
y -A2tJ sin(U(,t)-B((cJct). (10) (u)(.t)(Wct) .+ , +A2.K2sih()+B2K2cos(c.)ct): + (11)
+ Kis ajLe| i cDs(w,t)o.
После преобразований в вьфажении 1;(11), получим A(K2-tJ)sin(W(.t)+B((Wct) +
(3)
35
4 SiS|aKc eos(Wct)0.
(12)
40
Равенство (12) верно при любом t при условии A(K2-w)0; 2B(),c-(13)
Если круговая (циклическая) частота свободных колебаний технологической части толкателя, т.е..груза 6, . не совпадает с круговой (циклической) частотой We кулачка 4 - частотой воз- 45 буждения колебаний, т.е. ., то в этом случае из уравнений (13) следу ет, что
В.
А 0 R 1 1§ИаК.е ПЛ-)
г 2(K2-U)-
С учетом найденных значений А и частное рещение (9) имеет вид
V 1 1 ЕайР „очГ/ t) J. .. (5) Уг. 2() 2° - Подставив выражения (В) и (15) в формулу (7), получим общее решение однородного дифференциального вьфа-- жения (2).
,si.n(Kt) + B,cos(Kt) (4t) . (16)
V2.C
I- . „„„ 2(Кг-ф cos
Постоянные A i и В, определяются ii3 начальных условий
У( (17)
Продифференцировав решение уравнения (16) по времени, получим
У А,К cos(Kt)- sin ,(Kfc) +
f lf-Sf - 18) Записав выражения (16) и (18) цля с учетом начальных условий получим уравнения для определения постоянных А, и Bj :
А, B,---|i|f -,. (19)
Отсюда
А П- R .. 2(K2-w)
(20)
Из выражения (27) ви,цно, что чем ближе п к 1, т.е. чем ближе частота груза 6 кинематического возбуждения к частоте свободных колебаний жестко- . го толкателя 2, тем больше коэффициент динамичности и, следовательно, 20 больше разница в показаниях стрелочных указателей 11 и 12 по шкале 13, а показания стрелочного указателя 10 по шкале 14 будут наибольшими.
Груз 6 будет иметь максимальные колебания относительно жесткого толкателя 2 при . или K JiCJj., при этом достигается максимальная наглядность демонстрации.
Подставив значения постоянных в выражение (16), получим решение диф- ференциального уравнения (2):
--г4к -г п
(Wet))4-lJ. (21) зр
Выражение (-21) описывает движение груза 6.
Обозначим отношение К/(А)(П. Число Пс, показывает, во сколько раз
частота свободных колебаний груза 6
превышает частоту w. кулачка А -кине- поступательного перемещения подпружи- матического возбуждения, приложенного ненный толкатель с роликом на конце |К жесткому тошсателго 2.и закрепленный на стойке кулачок,
С учетом принятого обозначения закон движения груза 6 примет, вид
Формула изобретения
отличающийся тем, что, с целью повьш1ения точности демонстрации путем учета упругости технологической части толкателя, он имеет имитатор технологической части толкателя, выполненный в виде установленного на
ry-% - -fl 7rr-7T(n.cos(w,t) 40
2 L ,- -cos(Kt))J.
(i7l)
(22)
отличающийся тем, что, с целью повьш1ения точности демонстрации путем учета упругости технологической части толкателя, он имеет имитатор технологической части толкателя, выполненный в виде установленного на
50
После дифференцирования закона
движения (22) по времени получим вы- дБ вправляющей- груза и связанных с ним
центрирующих пружин, при этом толкатель подпружинен относительно стойки и имеет паз, а груз и пружины расположены в этом пазу.
ражения дпя скорости и ускорения груза 6:
) ---sin(Kt) ;(23)
S (J fi (W,t)-cos(Kt) . (24)
Из полученной формулы (24) для ускорения груза 6 определяется его максимальное ускорение, которое мо- жет быть достигнуто в момент времени, когда cos(w.t) 1 и cos(Kt)-1.
С
Величина максимального возможного усБ орения груза 6 определится как
55
У , Eif-ill l . .25) макс 2-1 .
Максимальное ускорение жесткого
К
Дин
(26)
(27)
толкателя 2 имеет вид
с li
/имкс 2
Коэффициент .динамичности определя- ется по уравнению
ллчкс 2п с
,.Г Р1 где Кд„„ - коэффициент динамичности.
Из выражения (27) ви,цно, что чем ближе п к 1, т.е. чем ближе частота груза 6 кинематического возбуждения к частоте свободных колебаний жестко- го толкателя 2, тем больше коэффициент динамичности и, следовательно, больше разница в показаниях стрелочных указателей 11 и 12 по шкале 13, а показания стрелочного указателя 10 по шкале 14 будут наибольшими.
Груз 6 будет иметь максимальные колебания относительно жесткого толкателя 2 при . или K JiCJj., при этом достигается максимальная наглядность демонстрации.
поступательного перемещения подпружи- ненный толкатель с роликом на конце и закрепленный на стойке кулачок,
Формула изобретения
отличающийся тем, что, с целью повьш1ения точности демонстрации путем учета упругости технологической части толкателя, он имеет имитатор технологической части толкателя, выполненный в виде установленного на
| Юденич В.В | |||
| и др | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| М, 1974, с.137. | |||
