1
Изобретение относится к области судостроения, в частности к имитаторам управления следящим золотником, например золотником судовой гидравлической рулевой машины.
Известны имитаторы управления следящим золотником, содержащие фундамент, электродвигатель с редуктором, стойку и блок вращающегося трансформатора, связанного с осциллографом.
Целью изобретения является создание имитатора, позволяющего получать высокую точность измерения характеристик машины, небольщой стоимости и конструктивно выполненного проще. Это достигается тем, что в стойке смонтирован вал с профильным кулачком, взаимодействующим со следящим толкателем, соверщающим возвратно-поступательное движение, соединенным со следящим золотником испытываемой рулевой машины, а под толкателем на фундаменте смонтирован курок, при этом к толкателю прикреплена ось с отверстием, через которое параллельно толкателю проходит нить, жестко связанная с толкателем и блоком вращающегося трансформатора, выдающим электрические сигналы на шлейф осциллографа.
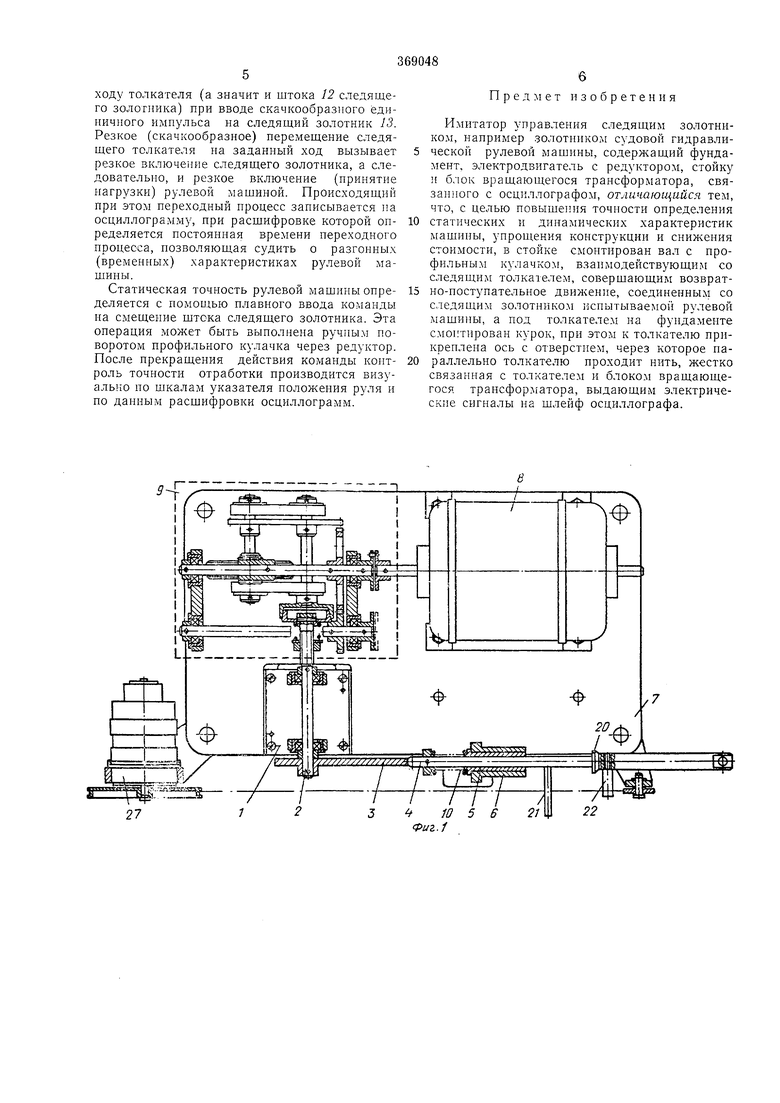
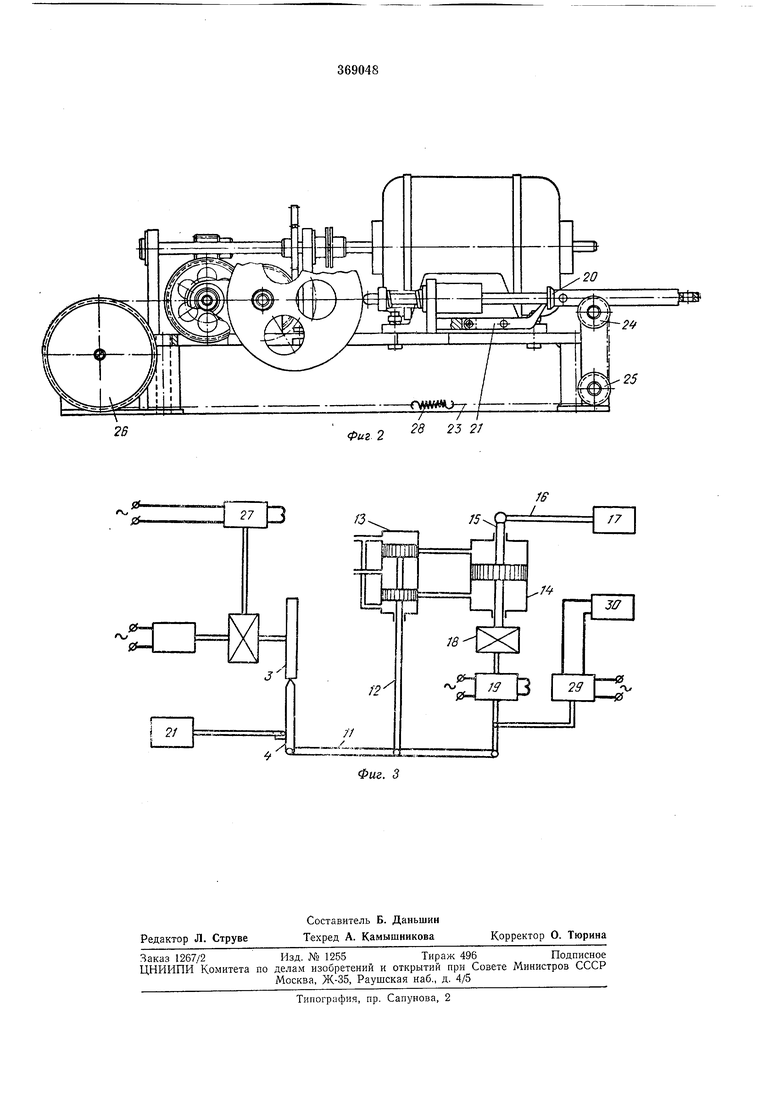
На фиг. 1 схематически изображен описываемый имитатор (с частичным разрезом), вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 -- принципиальная схема имитатора.
В стойке / имитатора управления смонтирован вал 2 с профильным кулачком 3, взаимодействующим со следящим толкателем 4. На профильном кулачке 3 записана синусоидальпая характеристика. Толкатель 4 установлен во втулке 5 опоры 6, жестко прикрепленный к плите 7, на которой установлены электродвигатель 8 и двухскоростной редуктор 9, кинематически соединенный с валом 2. Один конец
толкателя 4 посредством спиральной пружины 10 постоянно соприкасается с кулачком 3, а другой его конец посредством тяги 11 - со штоком 12 следящего золотника 13. Следящий золотник соединен с силовым цилиндром М,
шток 15 которого кинематически соединен с баллером 16 и грузом 17, представляющим собой имитатор пера руля, и с помощью редуктора 18 - с вращающимся трансформатором 19 обратной связи. На толкателе 4 имеется бурт 20, в который упирается курок 21, удерживающий толкатель в крайнем положении. У бурта 20 установлена ось 22 с отверстием, через которое параллельно толкателю 4 проходит нить 23, жестко связанная с осью 22,
а следовательно, и с толкателем. Нить 23 через блоки 24 и 25 связана с блоком 26, который закреплен на валу вращающегося трансформатора 27. Натяжение нити 23 осуществляется пружиной 28. Шток 15 силового цилиндра кинематически соединен также с сельсином-датчиком 29 указателя положения пера рулк 17, электрически связанным со шлейфом 30 осциллографа.
Работа имитатора описывается применительно к стендовым испытаниял судовой рулевой гидравлической машины. При вращении электродвигателя 8 с определенной постоянной скоростью приобретает непрерывное вращение профильный кулачок 3, на котором записана синусоидальная характеристика. Система из электродвигателя 8, редуктора, профильного кулачка 3 и некоторых других деталей представляет собой механический генератор синусоидального сигнала, который за счет наличия двухскоростного редуктора позволяет получать на выходе (профильном кулачке) гармонические синусоидальные сигналы с двумя различными частотами в соотношении 1:2.
Для построения частотных характеристик достаточно иметь две частоты управляющего сигнала.
Профильный кулачок 3 при вращении сообщает поступательное движение следящему толкателю 4 в заданном диапазоне хода и с заданной переменной скоростью, определяемой установленной частотой изменения синусоидального сигнала. В соответствии с заданными характеристиками движения следящего толкателя приобретает движение жестко связанный с ним щток 12 следящего золотника 13, расположенный на рулевой машине. Смещаясь с переменной скоростью с нулевого положения в ту или другую сторону, шток 12 следящего золотника 13 обеспечивает подачу рабочей жидкости на силовой цилиндр 14 рулевой мащины, вследствие чего с заданной скоростью и в заданном направлении движется силовой шток 15 машины. При этом поворачивается баллер 16, увлекая за собой груз 17. Одновременно с профильным кулачком 3 приводится в движение вращающийся трансформатор 27, конструкция которого обеспечивает при вращении на выходе вырабатывание электрического сигнала синусоидальной формы. Выходная характеристика трансформатора 27 в определенном, заранее выбранном масштабе, соответствует синусоидальной характеристике, вырабатываемой кулачком 3, в соответствии с которой перемещается шток 12 следящего золотника.
Таким образом, выходной сигнал с трансформатора 27, поступающий на шлейф 30 осциллографа и записываемый им, представляет собой имитацию входной характеристики рулевой машины, поступающей на вход следящего золотника 13.
После включения рулевой машины в работу и перекладки баллера 16 пера руля (груза) 17 поворачиваются также на определенный угол вращающийся трансформатор 19 обратной связи и сельсин-датчик 29 указателя положения пера руля 17.
Вращающийся трансформатор 19 и сельсиндатчик 29 связаны со штоком цилиндра 14 с помощью редуктора 18.
Известно что если на вход линейного устойчивого объекта подавать возмущения, имеюшие гармонически колебательный характер, то по истечении некоторого времени, когда переходный процесс закончится, выходная величина объекта будет также меняться гармонически с той же частотой, с которой изменяется входная величина, но с другой амплитудой и фазой.
Таким образом, при наличии снятых экспериментальным путем кривых изменения выходной величины при различных частотах гармонического возмущения по этим кривым может быть построена амплитудно-фазовая характеристика объекта (в данном случае - рулевой машины), модуль и фазу которой определяют по формулам:
А (W-) пь1х (Ц,) AxCW/)
L-2r.
(Wi)
где .4,iy (Wt) и Лвых (i - соответственно значения амплитуды колебаний входной и выходной величины при одной и той же частоте W,:;
L - расстояние между точками кривых изменения выходной и входной величин, находящихся в одной фазе;
Т - период колебаний;
параметр L определяет понятие динамической установившейся (амплитудной) ошибки, ф - фазовой ошибки. Все вместе экспериментальные данные: амплитудно-фазовая характеристика с параметрами Лвх(г), вых (г). Динамическая амплитудная ошибка с параметром L и фазовая ошибка с параметром ф позволяют судить о качестве испытуемой рулевой машины - ее
устойчивости и динамической точности в процессе регулирования (управления) курсом судна.
Входной и выходной сигналы, поступающие на вход следящего золотника 13 и снимаемые
с выхода рулевой машины (датчика обратной связи вращающегося трансформатора 19) соответственно записываются с помощью шлейфов 5(9 на осциллограф, а параметры Лвых (г), вх (г), L и т определяются в процессе расши({)ровки осциллограмм.
Запись на осциллографе процессов управления рулевой машиной при ее стендовых испытаниях с помощью предлагаемого имитатора производится на двух различных частотах
входного сигнала с соотношением 1:2.
Разгонная (временная) характеристика рулевой машины с помощью предлагаемого имитатора определяется следующим образом. При нажатии на курок 21 пружина 10 резко перемещает следящий толкатель 4 до упора в профильный кулачок 3. Профильный кулачок предварительно выводят из нулевого положения (причем он выходит из контакта со следящим толкателем), обеспечивая зазор между
толкателем и кулачком, равный необходимому
ходу толкателя (а значит и штока 12 следящего золотника) при вводе скачкообразного единичного имнульса на следящий золотник 13. Резкое (скачкообразное) перемещение следящего толкателя на заданный ход вызывает резкое включение следящего золотника, а следовательно, и резкое включение (принятие нагрузки) рулевой мащиной. Происходящий при этом переходный процесс записывается на осциллограмму, при расшифровке которой определяется постоянная времени переходного процесса, позволяющая судить о разгонных (временных) характеристиках рулевой машины.
Статическая точность рулевой машины определяется с помощью плавного ввода команды на смещение щтока следящего золотника. Эта операция может быть выполнена ручным поворотом профильного кулачка через редуктор. После прекращения действия команды контроль точности отработки производится визуально по шкалам указателя положения руля и по данным расшифровки осциллограмм.
6
Предмет изобретения
Имитатор управления следящим золотником, например золотннком судовой гидравлической рулевой машины, содерл ащий фундамент, электродвигатель с редуктором, стойку и блок вращающегося трансформатора, связанного с осциллографом, отличающийся тем, что, с целью повышения точности онределения
статических и динамических характеристик машины, упрощения конструкции и снижения стоимости, в стойке смонтирован вал с профильным кулачком, взаимодействующим со следящим толка1елем, соверщающим возвратно-поступательное движение, соединенным со следящим золотником испытываемой рулевой машины, а иод толкателем на фундаменте смонтирован курок, при этом к толкателю прикреплена ось с отверстием, через которое параллельио толкателю проходит нить, жестко связанная с толкателем и блоком вращающегося трансформатора, выдающим электрические сигналы на шлейф осциллографа.

| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВАЯ РУЛЕВАЯ МАШИНА | 1998 |
|
RU2156205C2 |
| Рулевое устройство судна | 1980 |
|
SU927642A1 |
| Судовая рулевая машина | 1979 |
|
SU839861A1 |
| ВИНТОРУЛЕВАЯ ОТКИДНАЯ КОЛОНКА СУДНА^ у ,.;••'"-^^'^'^-^^>&^;^п^садя-'-'•ЛКОТЕКА | 1967 |
|
SU205629A1 |
| Судовая рулевая машина | 1981 |
|
SU992322A1 |
| ИМИТАТОР ДЛЯ ОБРАБОТКИ КАНАЛА ПЕЛЕНГАЦИИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1970 |
|
SU1840956A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ | 1968 |
|
SU209984A1 |
| Судовая рулевая машина с электроприводом | 1980 |
|
SU933546A1 |
| Гидравлический рулевой привод | 1989 |
|
SU1620364A1 |
| Откидная поворотная колонка | 1982 |
|
SU1104049A1 |
й 1 1
Фиг. 3
