устарки скорости при увеличении или уменьгаении ваггичины задаггия задатчи- ком 13 скорости фop иpyeтcя задатчи- ком 25 интенсивности изменения движеч ния и блоком 16 задания режима движения в виде линейно возрастающего или с.падающег.о во времени сигнала. По величине и папярности сигналов рассогласования на вькодах регуляторов 7 тока и регулятора 8 скорости блок 16 фор шрует режим движения (тягу, выбег, торможение) в зависимости от изменяю- lujixcH условий сопротивления движению и заданной скорости. 2 з.п, ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости электроподвижного состава | 1988 |
|
SU1564014A1 |
| Устройство для регулирования тяговых электродвигателей электроподвижного состава | 1987 |
|
SU1512824A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1990 |
|
RU2034721C1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1986 |
|
SU1463546A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство для регулирования напряжения тягового генератора тепловоза | 1988 |
|
SU1576371A1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Устройство для частотного управления тяговым асинхронным электродвигателем | 1980 |
|
SU877768A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
-Изобретение относится к транспорту, в частности к устройствам для автоматического управления скоростью транспортных средств, и обеспечивает повышение устойчивости. Устройство содерж 1т регулятор 1 напряжения тяговых электродвигателей 2 с датчиками 3тока, подключенными к входам блока 4выделения максимального сигнала, и датчикаьм 5 скорости., пoдключeнны и к входам блока 6 выделения экстремального сигнала. Выход блока 4 и выход блока 6 подключены соответственно к входу регулятора 7 тока и регулятора 8 скорости. Устройство содержит также задатчик 13 скорости, элемент И 14, элемент НЕ 15, блок 16 задания режима движеьшя, включающий .кo mapaтop 17, нуль-органы 18 и 19, элементы 20 и 21 РАВНОЗНАЧНОСТЬ и НЕРАВНОЗНАЧ- , НОСТЬ, элемент НЕ 22 и элементы И 23, 24, задатчик 25 интенсивности изменения движения. Мгновенное значение (О (Л iU ел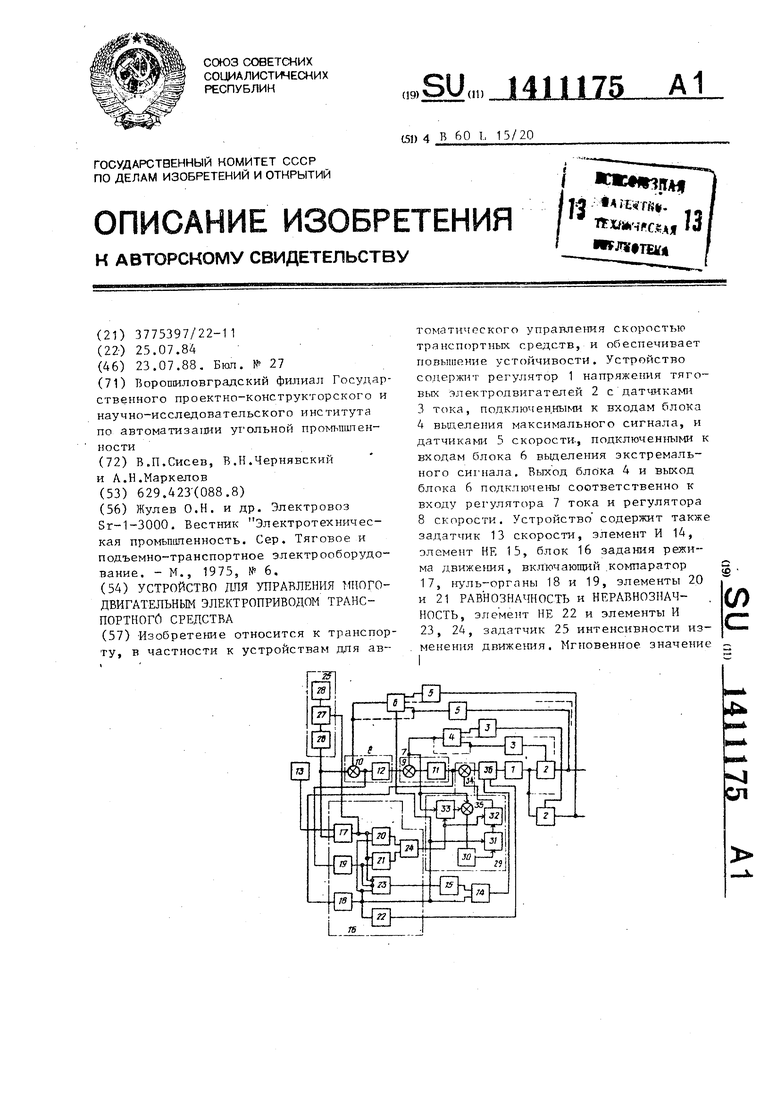
i
I
j Изобретение относится к транспор- | ту, в частности к устройствам для ;автоматического управления скоростью транспортных средств.
Цель изобретения - повьппение устойчивости устройства.
На чертеже представлена блок-схе- :.ма предлагаемого устройства.
Устройство содержит регулятор 1 на пряжения тяговых электродвигателей 2 с датчиками 3 тока, подключенными выходами к входам блока 4 выделения максимального сигнала, и с датчиками 5 скорости, подключенными выходами к входам блока 6 выделения экстремаль ного сигнала. Выходы блоков 4 и 6 под ключены к одному из входов соответственно регулятора 7 тока и регулятора 8 скорости с блоками 9 и 10 сравнения и усилителями 11 и 12. Устройство содержит также задатчик 13 скорости, .первый элемент И 14, первый элемент НЕ 15, блок 16 задания режима двшке- ния, включающий компаратор 17, первый 18 и второй 19 нуль-органы, элемент РАВНОЗНАЧНОСТЬ 20, элемент НЕРАВНОЗНАЧНОСТЬ 21, второй элемент НЕ 22, второй 23 и третий 24 элементы И, задатчик 25 интенсивности изменения движения, выполненный на интеграторе 26, первом пороговом элементе 27 и эадатчике 28 ускорения, блок 29 ликвидации избыточного скольжения, вклю- чаюищй задатчик 30 напряжения, второй пороговый- элемент 31, ключевой элемент 32, элем ент 33 памяти и первый 34 и второй 35 блоки сравнения, и блок 36 управления режимом движения. Выход задатчика 28 ускорения подключен к одному лз входов первого порогового элементл 27, соединенного вько- дом с входом интегратора 26. Выход ин
0
5
0
5
0
5
0
тегратора, являющийся входо задатчи- ка 25 интенсивности изменения скорости, подключен ко второму входу регулятора 8 скорости и к одному из входов компаратора 17, к другому входу которого подключен задатчик 13 скорости. Регулятор-8 скорости подключен выходом к входу регулятора 7 тока. Вход второго нуль-органа 19 соединен непосредственно с выходом блока 10 сравнения р егулятора 8 скорости. Выход регулятора 7 тока подклю ген к одному из входов первого блока 34 сравнения и к/входу первого нуль-органа. Выход первого нуль-органа 18 подключен, к входам первого 14 и второго 23 элементов И, второго элемента НЕ 22, блока РАВНОЗНАЧНОСТЬ 20, второго порогового элемента 31- и блока 6 выделения экстремального сигнала.
Выход второго нуль-органа 19 подключен к входам блока НЕРАВНОЗНАЧНОСТЬ 21 и- второго элемента И 23. Выход компаратора 17 подключен к входам первого порогового элемента 27, элементам
РАВНОЗНАЧНОСТЬ 20 и НЕРАВНОЗНАЧНОСТЬ
21 и второму элементу И 23, выход которого через первый элемент. НЕ 15 подключен к входу первого элемента И 14, соединенного выходом с одним из входов блока управления режимом движения, другой вход которого соединен с выходом второго элемента.НЕ 22, а третий - с выходом первого блока 34 сравнения. Выходы элементов 20 и 21 под,ключены к входам третьего эле- , мента И 24, соединенного выходом с входами второго порогового элемента 31 и элементом 33 памяти, выход которого подключен к одному из входов второго блока 35 сравнения, другой вход которого соединен с другим вхо31411173,
дом элемента 33 памяти и выходом бло-двиг-атели lie подается, и электровоч
ка 4 выде,пения максимального сигнала,находится в режиме выбега, а выход - с выходом задатчика 30 на-Если при движении электровоза в
пряжения, Быход последнего подключен ,режиме выбега д,ействите-льная скорость
к другому входу второго пороговогоотносительно длительное время прсвосэлемента 31, соединенного выходом сходит заданную скорость (составпяюдругим входом блока 34 сравнения.шая веса на уклоне превосходит соУстройство работает следующим об-противление движению), преобразованразом.10ное рассогласование токов на выходе
Мгновенное значение уставки ско-регулятора 7 тока изменяет свою порости при уменьшении или увеличениилярность, что приводит к изменению
величины задания задатчиком 13 ско-состояния нуль-органа 18 и исчезнорости формируется задатчиком 25 ин-вению сигнала на его выходе. После
тенсивности изменения движения и бло- 15этого элемент НЕ 22 переключает электком 16 задания режима движения. Сиг-ропривод через блок 36 управления в
налы с задатчика 13 и с интеграторарежим торможения. При восстановле26 сравниваются в компараторе 17, ко-нии положительного рассогласования
торьш в зависимости от знака рассогла-CKopocTeii, а затем и положительного
сования сравниваемых сигналов перехо- 20сигнала на выходе регулятора 7 тока
fViT из одного устойчивого состояьшя вэлектроприводу задается режим тяги, другое и своим выходным сигналом воз-При разгоне и торможении электрод .ействует на элемент 27,.который ре-привод работает, как правило, с поверсирует полярность сигнала с задат-вышенным оментом нагрузки, который
чика 28 ускорения. 25может превысить предельный момент по
Таким образом, в переходнтзк реж1-т-условиям сдеплег.ия колес с ре.пьсами. мах движения (разгоне, замедлении После этого развиваемьм одним или невплоть до остановки, переходе с уста-сколькими электродвигателями момент новки на уставку) в качестве сигналастановится больше момента, фактичес- мгновенно задаваемой скорости исполь- 30ки передаваемого колесными парами зуется линейно возрастающий или линей-составу, и имеюгалй место избыточньй но падающий во времени сигнал с вы-момент Электрогтривода расходуется на хода интегратора 26.сообщение колес 1ым парам дополнительПосле преобразования рассогласова-ней кинетической энергии (при бок- ния между задаваемой и -действительной 35совании) или на заклинивание, колесных скоростями в регуляторе 8- скоростипар (при юзе). В обоих случаях избы- и рассогласования токов в регулятореточное скольжение характеризуется с 7 тока сигнал с выхода последнегоодной стороны несовпадением величи- поступает на нуль-орган 18, сигнал сны, задаваемой интегратрром 26 ско- которого в зависимости от полярности 40рости и уставки с задатчика 13, а через элемент И 14 или через элементс другой - измене15ием знака рассогла- НЕ 22 переводит электропривод блокомсования между задаваемой и действи- управления в peJким тяги или в режимтельной скоростями, торможения. После достижения выходнымПри нормальном разгоне, которьп сигналом интегратора 26,сигнала устав-45осуществляется в режиме тяги, сигна- ки скорости с задатчика 13 скоростилы с выходов .компаратора 17, нуль- переходной режим движения завершается,органов 19 и 18 равны логической еди- и электропривод переходит в режим ста-нице. В боксования сигнал с билизации заданной скорости движения.выхода элемента 10 сравнезшя становит5Qся отрицательным, следовательно, сигПри движегош электровоза под ук-нал на выходе нуль-органа 19 станолон, когде действительная скоростьвится равным лоптеескому нулю. После
превосходит заданную уставку скорое-этого на выходах элемента РАВНОЗНАЧти, нуль-орга 19 переключается в ну-НОСТЬ 20 и элемента НЕРАВНОЗНАЧНОСТЬ
левое состояние и сигнал управления присутствук1т сигналы логических
тяговым режимом через элемент И 23,единиц, которые через элемент И 24
элемент НЕ 15 .и элемент И 14 в блокзамыкают посредством элемента 31 цепь
36 управлетгия не поступает. В этоммежду задатчиком 30 напряжения и блослучае напряжение на тяговые электро-ком 34 сравнетшя, в котором из выходного сигнала регулятора 7 тока вьрш- тается сигнал с задатчика 30 напряжения. Аналогично воздействие блока 16 задания режима, движения на элемент
32 в случае юза ксхлесной пары при торможении электровоза, однако в этом случае состояния компаратора 17 и 1нуль-органов 19 и 18 изменяются на |противоположные. Так как в режимах тя 1 и торможения полярность выходного Ьигнала с регулятора 7 тока изменяет- С:я , для согласования знаков сигналов задатчика 30 и с регулятора 7 элег ент 31 реверсирует папяриость выход ого сигнала в зависимости от состоя- ия нуль-органа 18.
I Поскольку в переходных режимах дви |кения тяговые электродвигатели .могут Выть различно нагружены из-за неиден- тичности механических характеристик, fl также из-за вариации осевых нагру- зок на колесные пары электровоза, для Предупреждения избыточного скольжения в устройство вводит блок 4 выде- Ления максимадьногЬ сигнала тока из йсех измеренных токов якорей многодвигательного электропривода,а для в Явления наиболее буксующей ипи юзуго- (щей колесной пары введен блок 6 опре- |целения максимального сигнала скорое- |ти при разгоне и минимального сигнала скорости при торможении, причем переключение блока 6 из одного режима в . другой производится по сигналу с выКода нуль-органа 18.
Для пре;.1отвращения возможных автоколебаний в системе регулирования При ступенчатом изменении управляю- дего воздействия на электропривод при возникновении избыточного скольжения колес, п ва.риантах устройств (либо в устройстве с контролем параметров одного электродвигателя, либо в устройстве с контролем параметров всех электродвигателей) предлагается изменение сигнала с вькода регулятора 7 тока производить в функции разности ме}вду величиной тока, измеренной в момент возникновения избь точного скольжения, и текущем значением тока Дпя этого сигнал с выхода элемента И поступает на .управляющий вход элемента 33-памяти, который запоминает ве- личинз тока в mмeнт возникновения боксования ИЛИ юза. Далее с этой ве личиной сравнивается текущее значение тока, и пропорционально разности изменяетог величина напряжения с за
j.
5
0 5 о
5
5
0
5
0
датчика 30, т,е. изменяется величина снижения управляюшего воздействия на тяговые электродвигатели. При исчезновении сигнала с элемента И 24, т.е. при восстановле1{ии нормального сцепления колес с рельсами, элемент 33 памяти (например, обратным фронтом сигнала управления) восстанавливается в исходное пулевое состояние.
Формула изобретения
элемента, другой вход которого подключен к выходу третьего элемента И, при этом задатчик ускорения подключен к одному из входов второго порогового элемента, соединенного выходом с входом интегратора, вход которого подключен к другому входу регулятора скорости и к из входов компаратора, соединенного другим входом с задатчиком скорости, а выходом - с другим входом элемента РАВНОЗНАЧНОСТЬ, другим входом второго элемента И, другим входом второго порогового элемента и с одним из вхо|дов элемента НЕРАВНОЗНАЧНОСТЬ, другой вход которого и третий вход второго элемента И подключены к выходу второго нуль-органа, подключенного входом
. к. другому выходу регулятора скорости.
0
с выходом третьего элемента И, при этом выход второго блока сравнения подключен к входу задатчика напряжения.
| Жулев О.Н | |||
| и др | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сер | |||
| Тяговое и Подъемно-транспортное электрооборудование | |||
| - М., 1975, № 6. | |||
