(54) УСТРОЙСТВО ДЛЯ ЧАСТОТНОГО УПРАВЛЕНИЯ ТЯГОВЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ
I . ;
Изобретение относится к электротехнике, в частности к устройствам для регулирования крутящего момента электродвигателя путем измеиения амплитуды и частоты питающего напряжения, и может найти применение в различных электротехнических установках, например в устройствах для частот: но-токового управления электроприводом переменного тока электромобиля с аккумуляторным источником энергии и вентильным преобразователем частоты с широтно-нмпульсной модуляцией выходного напряжения.
Известно устройство для частотного управления асинхронным электродвигателем, содержащее источиики сигнала управления,, датчики частоты вращения и частоты скольжения, регуляторы тока и скольжения, сумматор и систему управления преобразователем Частоты. Это устройство осуществляет частотио-токовое регулирование крутящего момента асннхронного электродвигателя со стабилизацией тока статора и частоты скольжеиия и реализует тяговый режим асинхрон- , кого двигателя (
Однако даииое устройство не позволяет реализовать генераторное (рекуперативное)
торможение асинхронного двигателя, необходимое для улучшения энергетических и тормозных характеристик электропривода электромобиля.
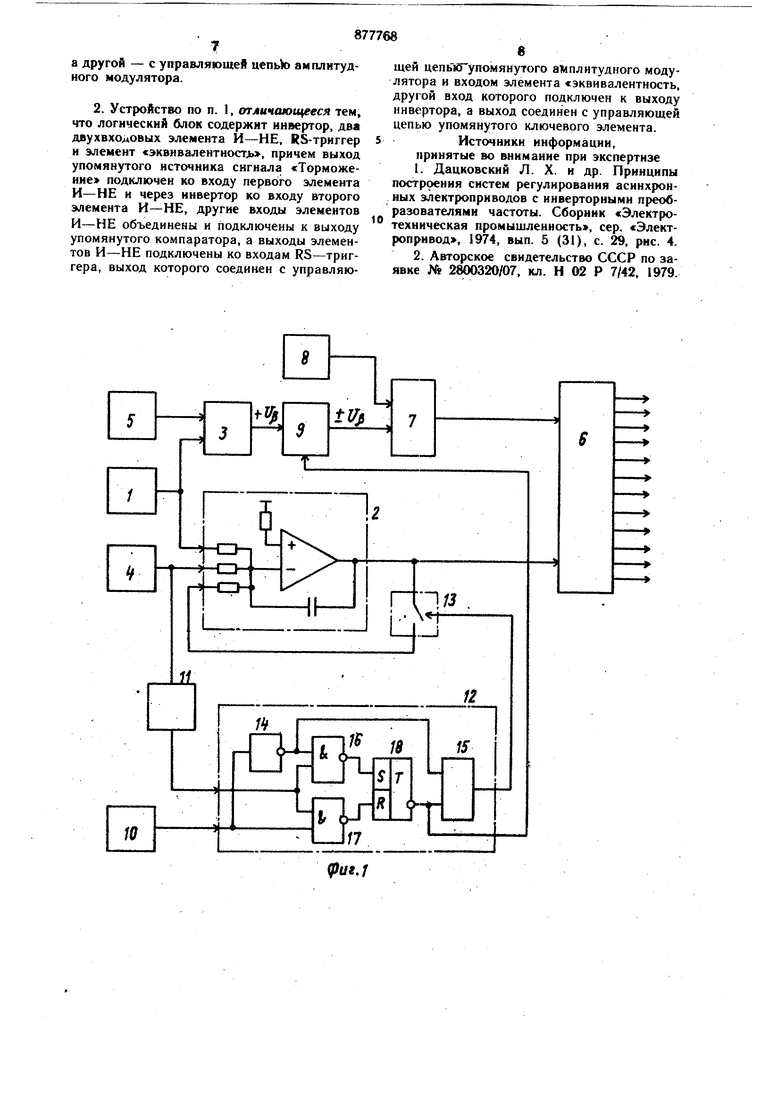
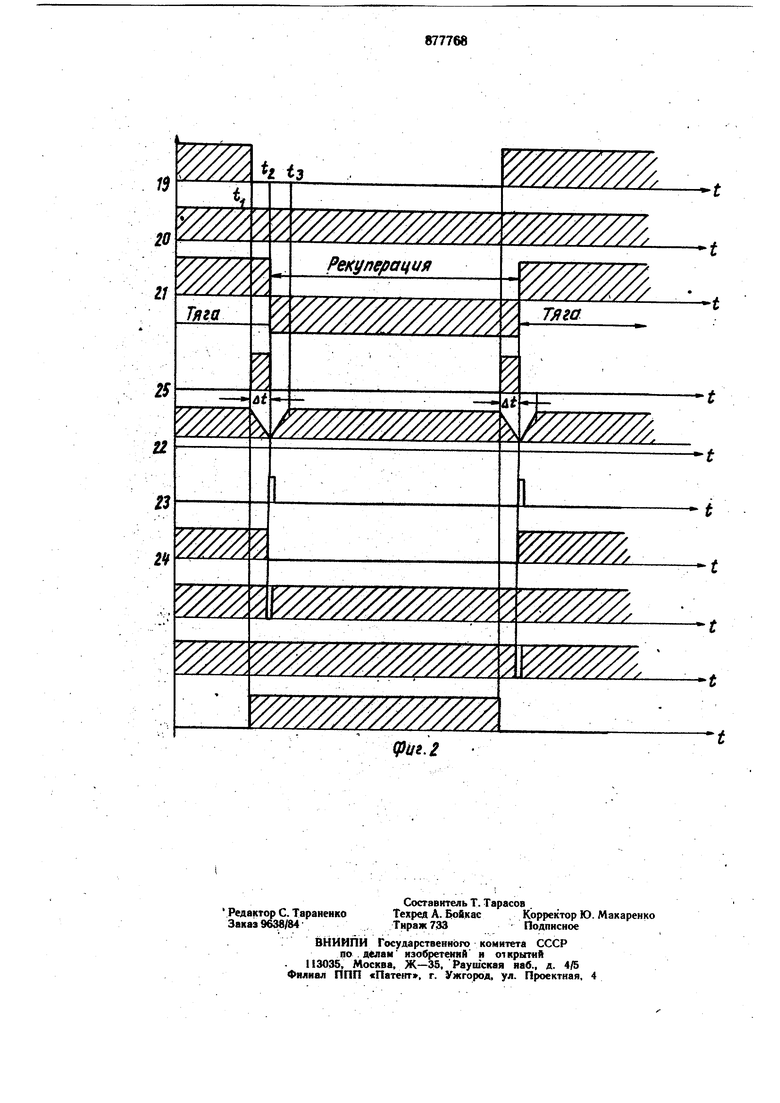
Наиболее близким техническим решением к предлагаемому является устройство для частотного управления асиихронным двигателем, содержащее источник сигнала задания момента, источник сигнала «торможение, датчики, сумматор, регулятор скольжения, амплитудный модулятор. Это уст,Ф ройство позволяет реализовать генераторное (рекуперативное) торможение асинхронного двигателя по сигналу «Торможение |2|. Однако при использовании данного уст. ройства (дополненного контуром регулирования тока) время перевода асинхронного двигателя из тягового режима в режим генераторного (рекуперативного) торможения может быть недопустимо большим. Действительио, для перевода асинхронного двигателя из тягового в генераторный режим необходимо изменение знака скольжения асинх20 ройного двигателя (изменение знака выходного сигиала амплитудного модулятора). Переключение знака скольжения при наличии сигнала задания момеита (и иаличны тока в асинхронном двигателе) не может быть реализовано нз-за насыщения магнитной цепи асинхронного двигателя в момент перехода скольжения через ноль и аварийного режима в преобразователе частоты. Поэтому для реализации режима торможения с известным устройством водитель электромобиля производит c6pot напряжения заДания по моменту и далее с выдержкой времени, достаточной для спада до нуля тока асинхронного двигателя, формирует сигнал .торможения (переключает знак скольжения) и затем осуществляет наброс напряжения задания по моменту. Эти операции производятся водителем электромобиля воздействием на «рганы управлення (вплоть до регулирования необходимой задержки для спада тока в асиихронном двигателе до нуля). При это,м время, необходимое для реализации тормозного момента, возрастает до единиц секунд, что не позволяет использовать генераторное торможение асинхронного двигателя при необходимости экстренного торможения в условиях дорожного движення, вызывает неуверениость водителя в электрическом тормозе и вeдet к исключению пользования электрическим торможением в условиях эксплуатации электромобиля. В результате уменьшается пробег электромобиля без прдзаряД аккумуляторных батарей, увеличивается тормозной путь (при пользовании только механическим тормозом). Ощибка водителя при реализации тормозного режнма вызывает насыщение магнитной цепи асинхронного двигателя и аварийный режим привода. Цель изобретения - уменьшение времени торможения асиихронного электродвигателя. Поставлениая цель достигается тем, что устройство для частотного управления тяговым асинхронным электродвнгателем, содержащее силовой преобразователь частоты с системой правления, источник сигнала «Торможение, датчики тока и скольжения, под ключенные ко входам регуляторов тока и, скольжения, источник сигнала задания мо; мента, соединенный с другими входами регулятора скольжения и регулятора тока, выход которого подключеи ко входу системы управления силовым преобразователем частоты, к другому входу которой подключен выход сумматора, вход которого соединен с выходом датчика частоты вращення, а другой вход - с выходом амплитудного модулятора, основной вход которого подключен к выходу регулятора скольжения, снабжено компаратором, подключенным к выходу датчика тока, ключевым элементом, основные цепи которогб включены между выходом и дополнительным входом регулятора тока, логическим блоком, вход компаратора подключен к выходу датчика тока, а выход его и выход источника сигнала «Торможение подключены Ко входу логического блока, один из выходов которого соединен с управляющей цепью ключевого элемента, а другой с управляющей цепью амплитудного модулятора. Логический блок содержит иивёртор, два двухвходовых элемента И-НЕ, RS-триггер и элемент «эквивалентность, причем выход упомянутого источника сигнала «Торможение подключен ко входу первого элемента И-НЕ и через инвертор ко входу второго элемента И-НЕ, другие входы элементов И-НЕ объедннены н подключены к Bbiходу упомянутого компаратора, а выходы элементов И-НЕ подключены ко входам RS-трнггера, выход которого соединен с управляющей цепью упомянутого амплитудного модулятора и входом элемента «эКвива- лентность, другой вход которого подключен к выходу инвертора, а выход соединен с уп равляющей цепью упомянутого ключевого элемента. На фиг. 1 представлена схема устройства для частного управления тяговым асинхронным электродвигателем; на фиг. 2 - временные диаграммы работы устройства. Устройство для частотного управления тяговым асинхронным электродвигателем (фиг. I) содержит источник 1 сигнала задания момента, подключениый ко входу регулятора 2 тока и регулятора 3 скольжения, i На другие входы регулятора 2 тока и регулятора 3 скольжения подключены соответственмо выходы датчика 4 тока и датчика 5 скольжения. Выход регулятора 2 тока подключен ко входу системы 6 управления силовым преобразователем частоты, на другой вход которой подключен выход с мматора 7. Ко входам сумматора 7 подключены датчик 8 частоты вращения асинхронного электродвигателя и выход амплитудного модулятора 9, основной вход которого подключен к зыходу регулятора 3 скольжения. Источинк 10 сигнала «Торможение и выход компаратора 11 подключены ко входам логического блока t2. Вход компаратора П под.ключен к выходу датчика 4 тока. Выход логического блока 12 подключен куправляющей цепи ключевого элемента 13, основные цепи которого включены между выходом и дополнительным входом регулятора 2 тока. Другой выход логического блока 12 подключен к управляющей цепи амплитудного модулятора 9. Логический блок 12 содержит инвертор 14, элемент S5 «эквивалентность, два элемента И-НЕ 16 н 17 и RS-триггер 18. Выход инвертора 14 соединен со входом элемента 15 «эквивалентность и входом элемента И-НЕ 16. Вход инвертора 14 соединен с выходом источника 10 сигнала «торможение н входом элемеита И-НЕ 17. Вторые входы элементов И-НЕ 16 и 17 объедннены н подключены к выходукомпаратора 11. Выходы элементов И-НЕ 16 И 17 подключены к входам асинхронного RS-триггера 18, выход которого соединен со вторым входом элемента 15 оквнвалентность и управляющей цепью амплитудного модулятора 9. Выход элемента 15 «эквивалентность подключен к управляющей цепи ключевого элемента 13. Устройство работает следующим образом. В нсходном состоянии на выходе источинка 10 сигнала «Торможение имеется сигнал, логической «1 (график 19, фиг. 2), что соответствует тяговому режиму асинхронного двигателя. При этом асинхронный двигатель реализует тяговый момент, пропорциональный напряжению, соответствук)щему графику 20 задающему фазный ток и частоту скольжения асинхронного двигателя, а на выходе амплитудного модулятора 9 - положительное напряженне (график 21). Для реализации генераторного торможения асинхронного двигателя на выходе источника 10 формируется сигнал логического «О (график 19). При этом в момент времени ti (график 19) на выходе элемента 15 «эквивалентность формируется сигнал логической «1, вызывающий замыкание ключевого элемента 13 (сброс регулятора 2 тока) и снижение тока асинхронного двигателя (график 22) до. значения, при котором исклк чается насыщение магнитной цепи асинхронного двигателя. При этом компаратор И переключается (график 23) из состояния логического «0 в логическую «1, разрещая переключе:ние триггера 18 (график 24),.что вызывает изменение знака напряжения а выходе амплитудного модулятора 9 (график 21) и знака скольжения асинхронного двигателя. На выходе элемента 15 формируется сигнал логического «О (график 25), вызывая размыкание ключа 13 и нарастание тока асинхронного двигателя до заданного значения (график 22). Реализуется режим генераторного (рекуперативного) торможения асинхронного двигателя с тормозным моментом, пропорциональным амплитуде напряжения, соответствующего,графику 20. Переключение знака скольжения асинхронного дйигаТеля в устройстве возможно только при минимальном значении тока статора асинхронного двигателя; определяемого порогом переключения компаратора И, что исключает насыщение магнитной цепи асинхронного двигателя и возникновение аварийного режима в переходном режиме. Задержка от момента прихода сигнала «Торможение (ti) до момента времени, при котором реализуется заданный тормозной момент асинхронного двигателя (1з) определяется временем сброса тока статора асинхронного двигателя, ограниченного условием непрерывности тока для исключения перенапряжений в.схеме, и временем нарастания тока (ti-tj) до заданного значения, определяемого постоянной времени контура р1егулировання тока. Так как величина Д t при «стмьзовании данного устройства не зависит от реакции водителя и от постоянной времени контура регулирования скольжения (что имеет место в известном устройстве), для реализации заданного тормозного момента асинхронного двигателя может быть умень- , шено на порядок и составляет 0,15--0,2 с, что позволяет осущес1вить экстренное генераторное торможение асинхроииого двигателя. Переход из режима торможения асинх-: рониого двигателя в тяговый режим также происходит автоматически за мииимальиый. интервал времени At (фиг. 2).: Таким образом, использование в даниом устройстве компаратора, ключевого элемента и логического блока позволяет существенно уменьшить время реализации геиераториого торможеиия асинхронного двигателя по сигналу водителя электромобиля и реализовать экстренное генераторное торможение асинхронного двигателя, исключить ёваряю электропривода в переходИом режиме, повысить безопас кхггь движения, увеличитьпробег электромобиля без подзарядки аккумуляторных батарей за счет повышения уверенности водителя прн пользовании электрнческим тормозом и увеличения количества энергии, возвращаемой в аккумуля- торные батареи р условиях дорожного движения. Формула изобретения 1. Устройство для частотного управления Тяговым асинхронным электродвигателем, содержащее силовой преобразователь частоты с системой управления, источник сигнала «Торможение, датчики тока и скольжения, подключенные ко входам регуляторов тока и скольжения, источник Сигнала задания момента, соединенный с другими входами регулятора скольжения и регулятора тока, выход регулятора тока подключен ко входу системы управления силовым преобразователем частоты, к другому входу которой подключен выход сумматора, вход которого соединен с выходом датчика чactoты вращения, а другой вход - с выходом амплитудного модулятора, основной вход которого подключен к выходу регулятора скольжения, отличающееся тем, что, с целью сокращения времени торможения асинхронного электродвигателяг оно снабжено компаратором, ключевым элементом, логическим блоком, причем основные цепи ключевого элемента включены между выходом и дополнительным входом регулятора тока, вход компаратора подключен к выходу датчика тока, а выход его и выход источника сигнала «Тор,можение подключены ко входу логического блока, один нз выходов которого соединен с управляющей цепью, клю чевого элемента, ,
а другой - с управляющей цельЬ амплитудного модулятора.
2. Устройство по п. 1, отличающееся тем, что логическнй блок содержит инвертор, два двухвходовых элемента И-НЕ, RS-триггер и элемент эквивалентностд, причем выход упомянутого источника сигнала «Торможение подключен ко входу первого элемента И-НЕ и через инвертор ко входу второго элемента И-НЕ, другие входы элементов И-НЕ объединены и подключены к выходу упомянутого компаратора, а выходы элементов И-НЕ подключены ко входам RS-триггера, выход которого соединен с управляющей цепьЖ упомянутого амплитудного модулятора и входом элемента «эквивалентность, другой вход которого подключен к выходу инвертора, а выход соединен с управляющей цепью упомянутого ключевого элемента.
Источники информации, принятые во виимаиие при экспертизе
1.Дацковский Л. X. и др. Принципы постррения систем регулирования асинхронных электроприводов с ииверторными преобразователями частоты. Сборник «Электротехническая промышлеииость, сер. «Электропривод, 1974, вып. 5 (31), с. 29, рис. 4.
2.Авторское свидетельство СССР по заявке № 2800320/07, кл. Н 02 Р 7/42, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство длля управления асинхронным электродвигателем | 1979 |
|
SU928583A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Устройство для управления торможением частотно-регулируемого электропривода | 1984 |
|
SU1236593A1 |
| Тяговый теплоэлектрический привод переменного тока | 1974 |
|
SU527313A1 |
| Устройство для регулирования тормозного момента асинхронной машины | 1975 |
|
SU546507A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| Устройство для автоматического управления асинхронным двигателем в режиме частотного торможения | 1980 |
|
SU985912A1 |
| Устройство для управления асинхронным электродвигателем | 1979 |
|
SU864479A1 |
| Частотно-регулируемый электропривод перемещения | 1987 |
|
SU1415392A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1325653A1 |
(раг.г
1$ 20
и
25 22 23 2
(pUi.2
