Фиг. 2
И;5обрстс1 ие относится к ссльскохозяйст- к пному машиностроению, в частности к рабочим opi MHaM ку. пл иватора.
Це.ть 11:«)брстения - повышение надежности и качества обработки различных но физико механическому составу почв.
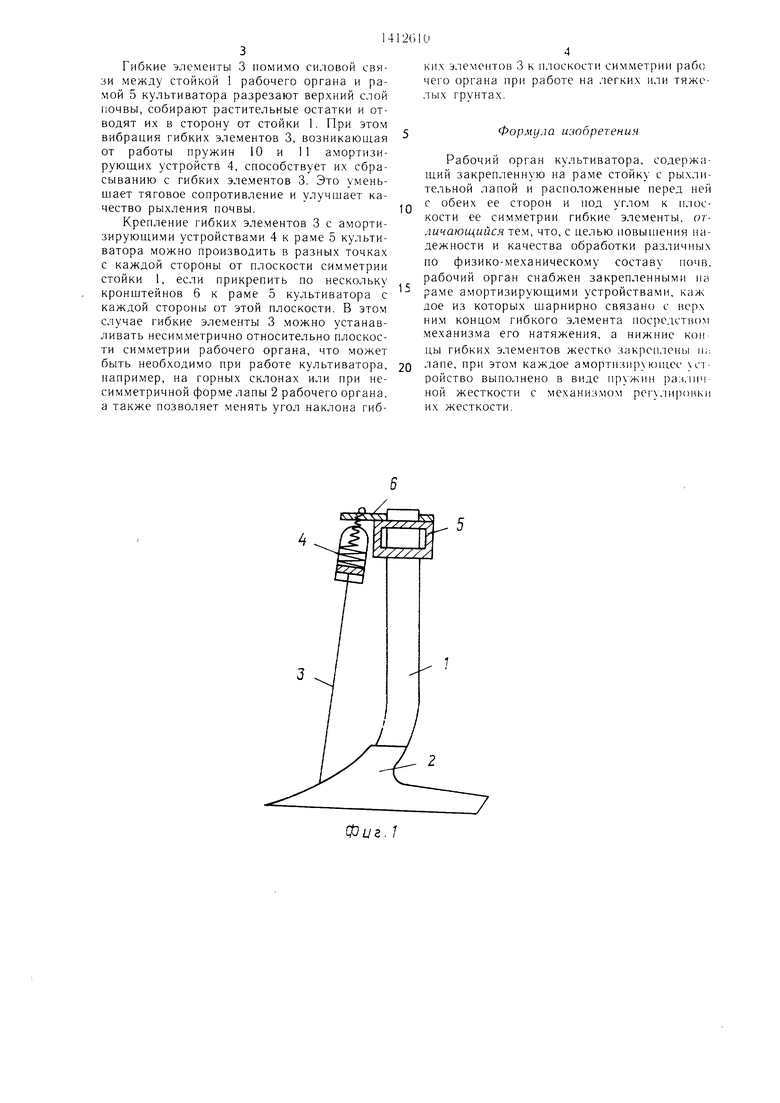
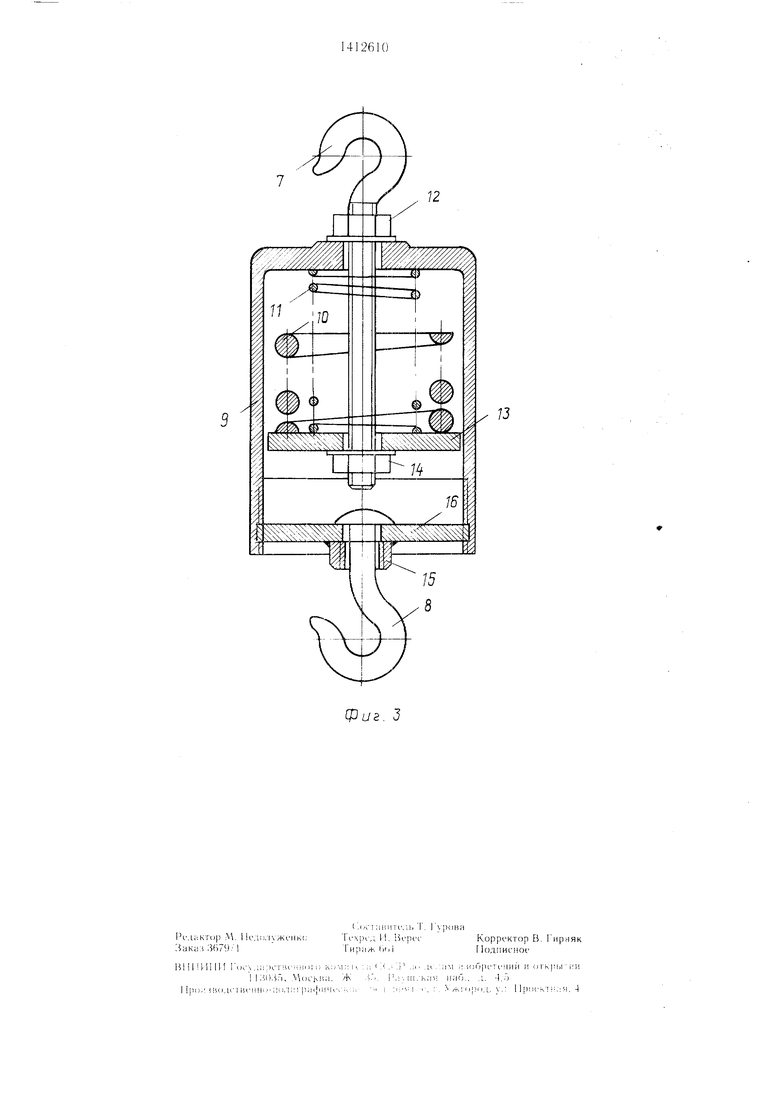
Ма фиг. 1 изображен рабочий орган, вид сбоку; на фи1 2 го же, вид снереди; на фиг. 3 амортизирующее )йств().
Рабочий орган состоит из стойки 1, рыхлительной .таны 2 и гибких элементов 3 с амортизирукмцими устройствами 4. Каждый гибкий элемент 3 одним концом жестко соединен с ланой 2, а другим через аморти- 31 рук)Н1ее устройство 4 с рамой 5 культиватора. Па раму о с обеих сто)он на некотором расстоянии от н. юскости симметрии рабоче1 о органа прикрепляются (с номошыо болтов или сварки) кронн1тейны 6 с отверстиями под верхние захваты 7 амортизи- руюнщх устройств 4. Амортизирующие уст- poiicTBa 4 нижним захватом 8 соединен1 1 с iK pxHHM конном соответствук)1Цего гибко1Ч) элемента 3, а верхним захватом 7 с крошн- TeiiHOM 6 рамв ку.тьтиватора. Таким образом, С14)йка 1 с обоих концов кренится к рамс 5 кул1 тиватора; верхним концом жестко, нижним концом - через .тану 2, гибкие э.:|еме1гг1 1 3 и амортизируюи1ие устройства 4 И1арнирно.
Аморт1 зируюн1се устройство 4 состоит из корпуса 9. в котором размсинены нружи- ны 10 и 11 разной жесткости, причем жесткост1 пружины 11 менвше жесткости нру- /кины 10. .ViexaHH3M регулировки жесткости комплекта нружин 10 и 11 вынолнен в виде верхне Ч) зах1;ата 7 с навинченной на нрямом участке рсгу.тирогючной | айкой 12. ирону- шенного через верхнее отверстие в корпусе 9. нижний конец которого ввернут в упорную пластину 13 и закреплен гайкой 14. С. нижн.ей стороны корнуса 9 имеется меха- 1ШЗМ натяжения i4i6KOi-o э.темента 3 в виде ввинченно круглой иластины 15 и скрен- .тешюй с ней айки 16. В пластине 15 жрен.1ен нижний захват 18, имеющий свободу вращения в ней. Регулировка жесткости аме)ртизируюшего устройства на нуж- НВ1Й режим работы производится с номонгью сжатия нружин К) и 11 врашение.м гайки 12. Натяжение гибкого элемента 3 производится нри помощи ввинчивания нласти- иь 15 -айкой 16. При этом усилие сжатия нружин И) и И амортизируюн1его устройства 4 может от;ычатвся от усилия натяже- н.ия |-ибкого элемента 3, так как их регулировка осун1ествляется независимо друг от друга с помощью 1 аек 12 и.ш И) с(Л)т- вететвенно.
Гибкие элементы 3 с амортизирующими устройствами 4 установ.тены симметрично относительно Н. ЮСКОСТИ симмет)ии стойки рабочего и иод углом к ней и имеют одинаковую регулировку усилий натяжения гибких э.пементов 3 и регулировку жесткости
0
комилект а иружин 1( и 11 а 0ртизирую- Н1ИХ устройств 4.
Рабочий орган работает следующим образом.
При движсш и рабочего орг ана нереме- 5 нцмшя .таны 2 в иродольной и цонереч- ной н.аоскостях через 1 ибкие э.тементы 3 передаются на амортизирующие устройства 4. сжимая его н)ужины 10 и 11 и нередавая часть на1 рузкн от стойки 1 рабочего оргаQ на на )аму 5 ку.тьтиватора. При этом стойка 1 разг)ужается. а возникаюнгие в амор- тизи{)ук)Н1их устройствах 4 усилия стремятся вер)у П) рабочий орган 2 в первоначальное рабочее положение. Подбором жесткос- тей нружин 10 и 1 амортизирующих уст5 ройс 1т 4 и можно ограничить иеременге- рабочег о о)гана в заданных преде.тах, т.е. )е1 у.:1ировать жесткость рабочего органа I нродо.тьной и 11оне)ечной нлоскостях в зависимости от ус.ювнй ei4) работы С другой cTopoHiii уси.чия. возникающие в гибких элементах 3 и амортизи)ую1цих у|.тройствах 4. зависят от соотно1нения изгибной жесткости стойки 1 i 11рсх ШЛ)ной н.юскости ее симметрии и жесткости нри растяжении гибких элементов 3 i сжатии нружин 10 и 11 амор5 визирующих устройств 4. Подбором этих жесткостей можно pei-улировать нагрузку, восириннмаему ю стойкой 1 и i-ибкими э. 1е- мент;1ми 3.
Лм(ртиз11рую1ние ycTiioiicTBa 4 мо1 ут быть 0 (рассчитаны д.1я рабсптл в двух автоматически сменяюн1их друг д)уга р С-жимах. Первый режим имеет меето нри работе в легких грунтах. В Н жиме работают пружи- 1Н)1 11. Па втором режиме устройство работает нри новыше нных нагрузках. нанри%;ер 5 в гяже.ых грунтах и. 1и lipH иов1)1Н1енных скорск тях, т.е. в случаях, когда может f-a- стунить ноте)я устойчивости плоской формы изгиба стойки 1 рабоче1 о opi aHTj. Па этом режиме нрх жины К) и 11 начинают рабо- тать нара.т.тельно. иричем жесткость амортизирующих устройств 4 значите. 1ьно новы- Н1ается. В этом с:1учае еше бо. 1ыне oi- раничиваются вертика. 1ьные и горизонтальные неремешения ojiraiia. орган удерживается в нл(Л-косги симметри -, 5 и нредотврашается потеря ег: поперечной уст ойчивости. При иерегрузках неожиданного характера иружины 10, I 1 амортизирующих устройств 4 Ho. iiiocTbK) сжил аЮТСЯ. при этом СВОбОД11ЬШ Х0.1 Н)уЖИН 10
и 1 не д(.1.чжен нревьцпать максима. 1ьно до- 0 нустимые перемещения рабоче1 о органа в н)одольной и нонеречной нлоскостях. тизируюпше устройства 4. создавая возвра- Н1.ак)1цие еи.ты нри отклонениях . 1аны 2 в стороны от нервонача. 1вн()го состояния, вы- з1)Ц-5аю 1 нродо.пьные и HoaepCHiibie )леба- ния рабочего (.tpraiia, что с. ус- | ойчивосгь его движения в почве. понг:жас : тяговое сонротив.тение и иовыщае) рабсп ы.
Гибкие элементы 3 помимо силовой связи между стойкой 1 рабочего органа и рамой 5 культиватора разрезают верхний слой (очвы, собирают растительные остатки и отводят их в сторону от стойки 1. При этом вибрация гибких элементов 3, возникающая от работы пружин 10 и 11 амортизирующих устройств 4, способствует их сбрасыванию с гибких элементов 3. Это уменьшает тяговое сопротивление и улучшает качество рыхления почвы.
Крепление гибких элементов 3 с амортизирующими устройствами 4 к раме 5 культиватора можно производить в разных точках с каждой стороны от плоскости симметрии стойки 1, если прикрепить по нескольку кронштейнов 6 к раме 5 культиватора с каждой стороны от этой плоскости. В этом случае гибкие элементы 3 можно устанавливать несимметрично относительно плоскости симметрии рабочего органа, что .может быть необходимо при работе культиватора, например, на горных склонах или при несимметричной форме лапы 2 рабочего органа, а также позволяет менять угол наклона гиб0
0
ких элементоЕ 3 к плоскости симметрии рабо чего органа при работе на легких или тяжелых грунтах.
Формула изобретения
Рабочий орган культиватора, содержащий закрепленную на раме стойку с рыхли- тельной лапой и расположенные перед ней с обеих ее сторон и под углом к п. юс- кости ее симметрии гибкие элементы, отличающийся тем, что, с целью повышения надежности и качества обработки различных по физико-механическому составу почв, рабочий орган снабжен закрепленными на раме амортизирующими устройствами, каж дое из которых шарнирно связано с верх ним концом гибкого элемента посредством механизма его натяжения, а нижние кон цы гибких элементов жестко закре11лен1 1 п;; лапе, при этом каждое амортизирующее ст- ройство выполнено в виде пружин разлпч ной жесткости с механизмом регулировки их жесткости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган культиватора | 1989 |
|
SU1676470A1 |
| Устройство для загрузки и разгрузки транспортного средства | 1986 |
|
SU1316961A1 |
| Плоскорежущая лапа | 2024 |
|
RU2831803C1 |
| Виброударная площадка | 1984 |
|
SU1331644A1 |
| Широкозахватная почвообрабатывающая машина | 1990 |
|
SU1790830A1 |
| ТРОСОВЫЙ КУЛЬТИВАТОР ДЛЯ РАЗНОГЛУБИННОЙ ОБРАБОТКИ ПОЧВЫ | 2017 |
|
RU2657463C1 |
| Секция культиватора с генератором колебаний | 2024 |
|
RU2833857C1 |
| Секция культиватора с генератором вибраций | 2024 |
|
RU2833590C1 |
| Грузозахватное устройство | 1986 |
|
SU1379221A1 |
| Рабочий орган культиватора с генератором вибрации | 2018 |
|
RU2701676C1 |
Изобретение относится к ce-ibCKOxo- зяйетвенно.му .ча1ннностроеннк), s частности к рабочи.м органам к мьтивато)а. Ие.тью изобретения является H()ii iHieiine надежности и качества об)аботк) различных но физи- ко-механичееко.му coc iaBy почв, {- абочнй ор- г ан состоит и.з I, (1ых;пгге, 11)Ной . (РЛ I 2 и гибких элементов (Г Э) 3 с а.мор- )ни1МИ уст)ойствами (.ЛУ) 4. С/гой 5q ги.м через одно из .ЛУ и KponHiTei iH 6 с pa.Moii 5. Каждое из . вьню. шено R виде раз.меи1е 1Н1)1х в корич сс нружин К) и II раз;1ичной жесткости с ме.ханизмом )сгули- ровкн нх жесткоети. Каждый из ГЭ связан с одним из .ЛУ Н1а|1нирно через .механизм егч) натяжения. Э расно. южены нод уг.юм к н.юскоети . стойю-; I. При движении перемещения Р, 1 в Hpo;ux ii H()i i и иоие- речион н.юскостях через ГЭ нередаютея на .ЛУ. Прх жнны И) п II сжимаются и передают част|, нагр 31чи от сто1 1ки I на раму 5. Подбором жсст1 ости из иружшиз К) и, 1И I I . можно ()1 раничить иеремеи1снне стойки Г В завис имост -: от физико-механических ciUMicTii i;cH-;Bi- носредетвом .меха- низ.ма натяжения реглми юватв степень натяжения ГЭ. ГЭ обесисчнва О также разрезание , ебор и отвод paciai- те.)1Х ocTaTKOii от стойки:. .3 n.i. «5 -«
Фиг. 1
13
| Рабочий орган культиватора | 1974 |
|
SU536768A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Орудие для обработки почвы | 1982 |
|
SU1036260A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
