.
-
сл
о:) со
N3
/
v
-
/
X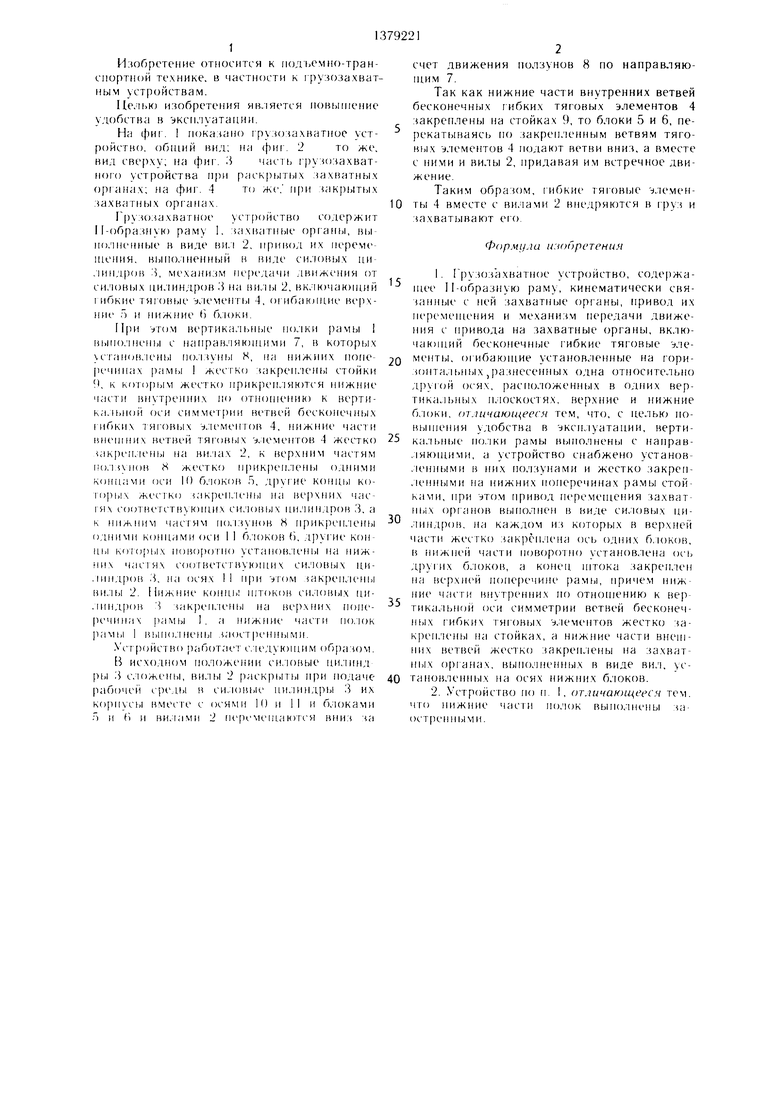
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Стенд для испытания стропов | 1990 |
|
SU1779664A1 |
| Устройство для предохранения обуви от скольжения | 1986 |
|
SU1378807A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1752724A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| Грузозахватное устройство крана-штабелера | 1986 |
|
SU1382767A1 |
| Устройство для загрузки и разгрузки стеллажей | 1983 |
|
SU1134484A1 |
| Грузоподъемный механизм | 1990 |
|
SU1720995A1 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
И;(()бротеиие относится к ио/п.емно- транспортиой технике, и ч;)стн()стн к .и захнгппым устройс вам. Це.1ьк) и.чоГ)реге)1ия яи.пяется повышение ч.юоетва iKcii. ivaTanHH. Вилы 2 закреплены на осях II, свя:)ан ных с силовыми цилиндрами 3, и на нижпи.х частях впенши.х ветвей Г)ескопечн1)1х гиГжих тяювых элементов 4, огибаюншх п.кжи 5 и (), нижние частп внутренних ветвс й кот())ых свя:(апы жестко со сто11ками 9 рамы 1 Б.юки 5 и 6, нерекатываяс ь но внутренним ветвям |нбких тя1 овых :1лементов 4, подают EiHeHiHiie ветви вниз, а вместе с ними и связанные с нимп 2, придавая им встречпое вран1аге.ЬН()е движение. 4 ил.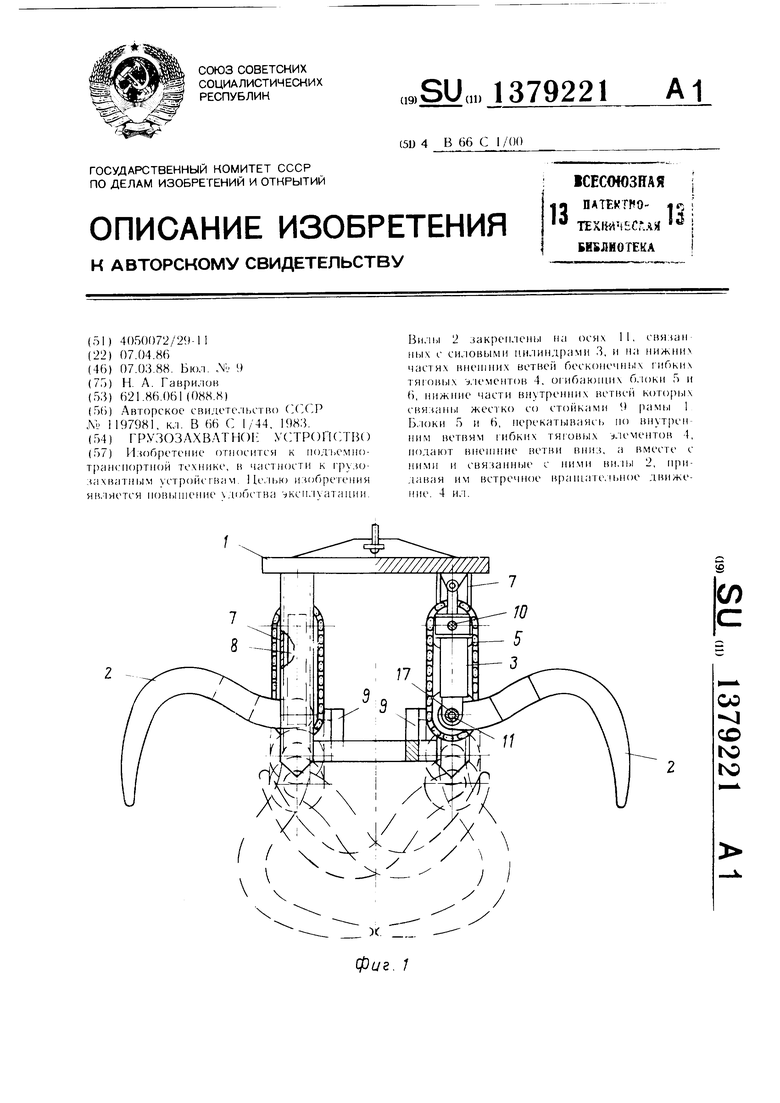
)t
фиг. 1
Изобретение относится к польемно-тран- спортной технике, в частности к грузозахватным устройствам.
Целью изобретения является 11ОВ111 нение удобства в : ксг1луатании.
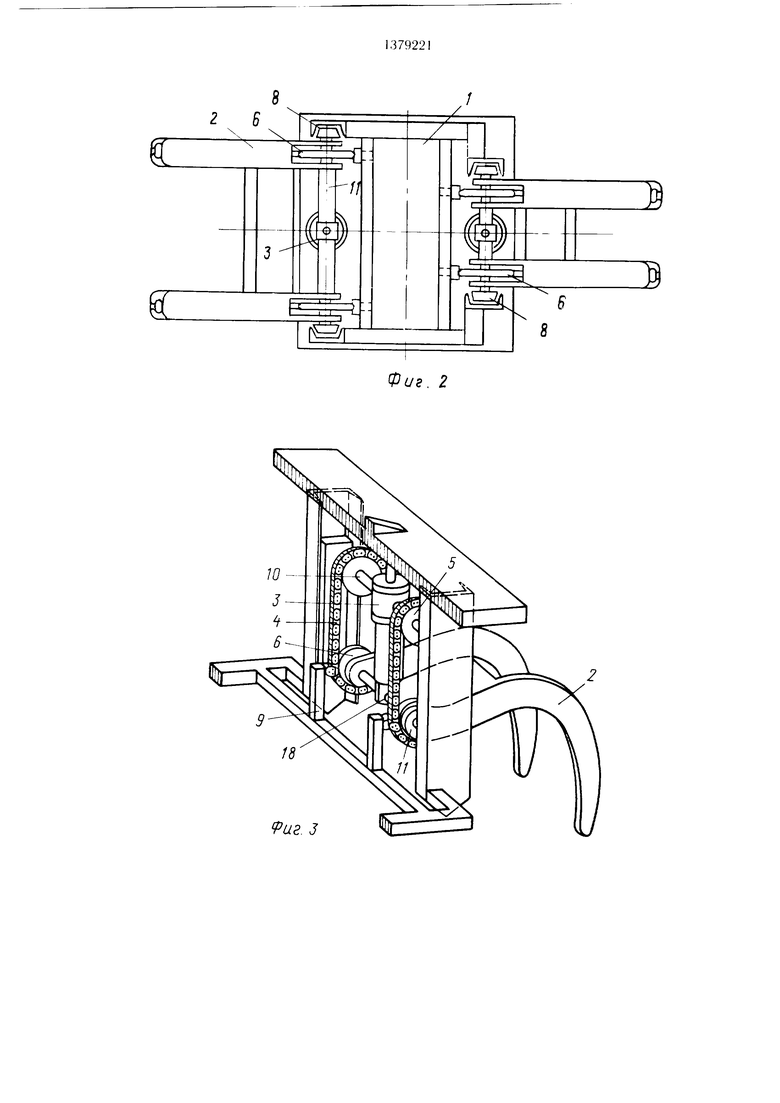
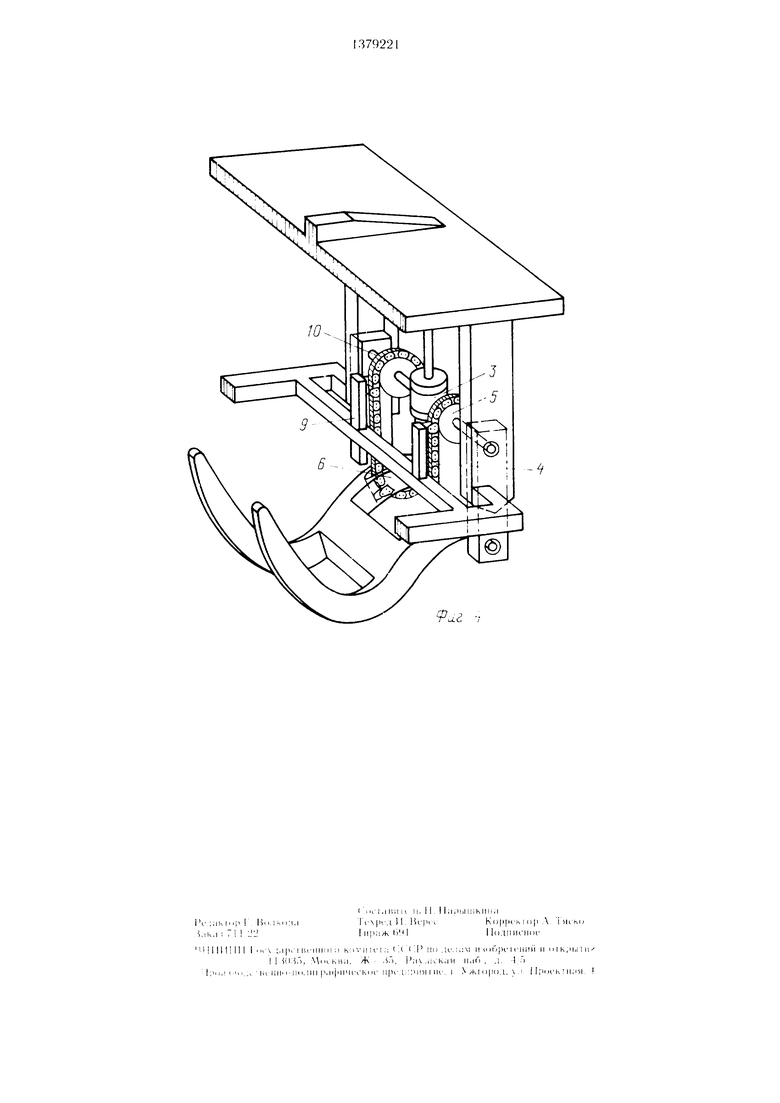
На фи. 1 показано грузозахватное устройство. обн1ий вил; на (f)nr. 2 то же. вил сверху; на фиг. 3 часть грузозахват- Hoi o устройства н)и раскрьггых зах1 атных органах; на фи1 . 4 то же. н)и зак|)ытьг захватных органах,
1 рузозахватное уст()ойство содержит П-образнук) раму 1. захватные органы, пы- но.чнснные в виде ви.1 2. нривол их перемещения. вьи1().1ненный в виде си. ювых ци- .1инл))и ., механизм не)елачп лвижении от си. ювьгч пи:1инлров.З на вилы 2. вк. 1К)чак)ни1Й I ибкие тя1()5ые Ь1.1ементы 4. oin6aK)nuie верхние 5 и нижние Г) б.юки.
При :)том вертикальн1)1е но. 1ки )амы 1 HbHio. iHCfibi с нанрав.чякмаими 7, в которьгх vcranofi.ieHbi но.чзуны К, па нижних ноне- рс чннах рамы 1 жссгко закрен.чены стойки П. к ког())ым жестко прикрепляются ннжние части ннутре1{них по ()тно1пеник) к верти- ка.1ьпой оси симмет)ии ветвей 6ecKoiie4iU)ix гибких 1ЯГОВЫХ si.ieMCH roFi 4. нижние части внешних ветвей тя1 ов1 г :).1е 1ентов 4 жестко (aKpcn.icFH, на ви.чах 2, к верхним частям п().1зупов 8 жестко 11рик|)еп.лепы олними копнами оси И) б.чоков 5. л|)угие концы ко- горых жес1ко .чкрен. 1сны на ве)хних частях соотвегствч к)П1их CH.)i ни.чинлров 3. а к нижним часгям по.1зунов 8 прикрсн.лены копнами оси I 1 б. кжов (i. Л1 угие концы KoT())iiix iioiio)oTH() установ. 1ены на нижних часгях соогветсгвун)Н1их силовиях ци- .1пплро 5 3. на осях II эгом (акреп. И1.лы 2. Нижние копць: штоков силовьгх lui- .1индров 3 закреп. на верхних Hoii(- |)ечи1ьчх рамы 1, а нижние части но.юк рамь 1 вьпю.лнепы заостренными.
Устройство 1)аботает с.ледующим образом.
К исходном положении си.ювые нилинд ры 3 сложены, илы 2 )аскрьг1ы нри подаче рабочс среды в си.ншыс пи.1ипдры .3 и.х корпусы вмссге с осями 10 п 11 и б.юками Г) и () и ви.лами 2 нерсмептаюгся вниз за
счет движения ползунов 8 по направляющим 7.
Так как нижние части внутренних ветвей бесконечных гибких тяговых эле.ментов 4 закреплены на стойках 9, то блоки 5 и 6, перекатываясь но закренленным ветвям тяговых элементов 4 подают ветви вниз, а вместе с ни.ми и вилы 2, придавая им встречное движение.
Таким образом, гибкие 7ягов1)1е элемен- 0 ты 4 вместе с ви.чами 2 внедряются в 1 руз и .захват111вают егч).
Фирмула и:(6ретени.ч
I. Грузозахватное устройство, содержа- Hiee П-образную раму, кинематически свя- заншле с ней захватные органы, привод их перемещения и механизм передачи движения с привода на захватные органы, вклю- чаюп1ий бесконечные гибкие тяговые -:)леQ менты, огибаюнще установленные на гори- .зопта.пьньгх ,разнесен йз1х одна относнтельно Л1)у1ой осях, расположенне)1Х в одних вер- тика.1ьных ПЛОСКОС1ЯХ. верхние и нижние б.юки. (п.тчающееся тем, что. с целью но- вьппения удобства в уксн.луатапии. верти5 калын)1е ио.лки рамы вьнюлнены с нанрав- .|яющими, а устройство снабжено установ- .1енными в них ползунами и жестко закрен- .К нными на нижних ноперечинах рамы стойками, нри утом привод перемещения захват- 1ПмХ орга)К)в в 1П1олнеп в виде си.ювых ци- . 1инд)ов. на каждом и.з которых в верхней части жес тко закрёп.аена ось одних б.юков. ( нижней части новоро ию установлена oci других б.1()ков, а конец штока закреплен на верхн(Н1 11опе)ечи11е рамы, причем ннжние части внутренних но отно1пению к вертикальной оси симметрии ветвей бесконечных гибких тяг овьгх ii.K MeHTOB жестко за- кренлены на стойках, а нижние части внешних ветвей жестко закрен.лены на захватных органах. Bijnio. ineHHiiLx в виде вил. ус0 тановленн|)Г на осях нижних б. юков.
5
6
.
ШЕ ti
Риг. J
/
&
7/
i
i/г. г
2
