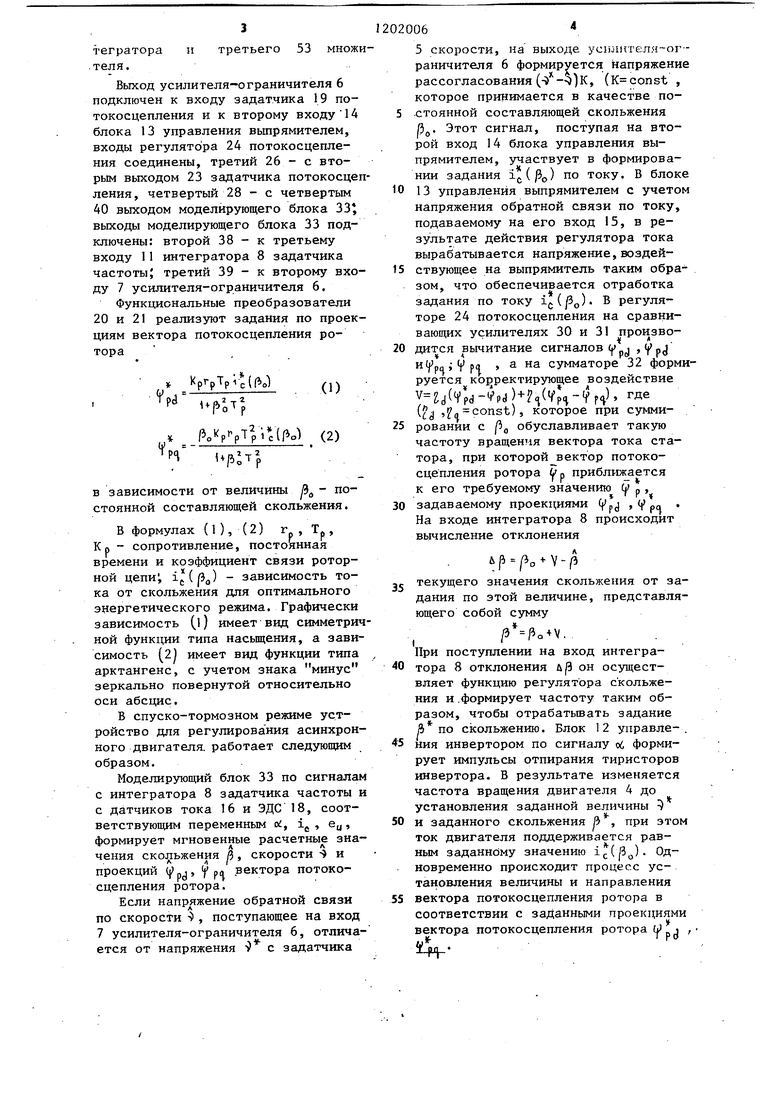
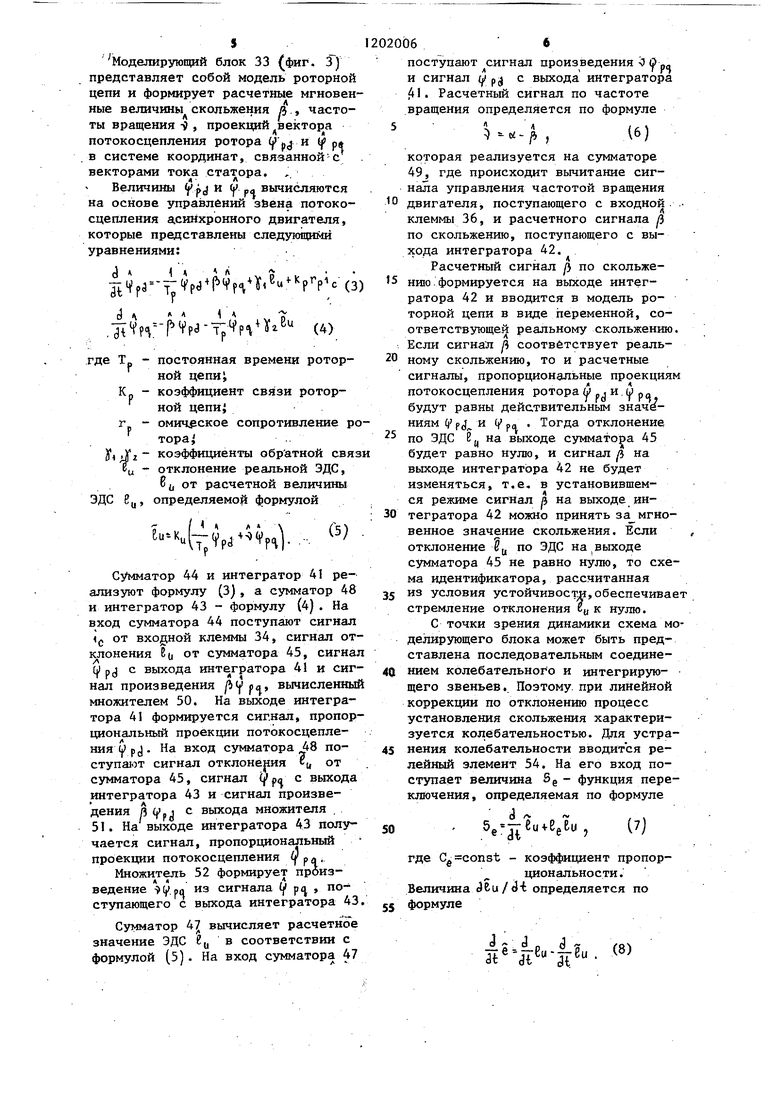
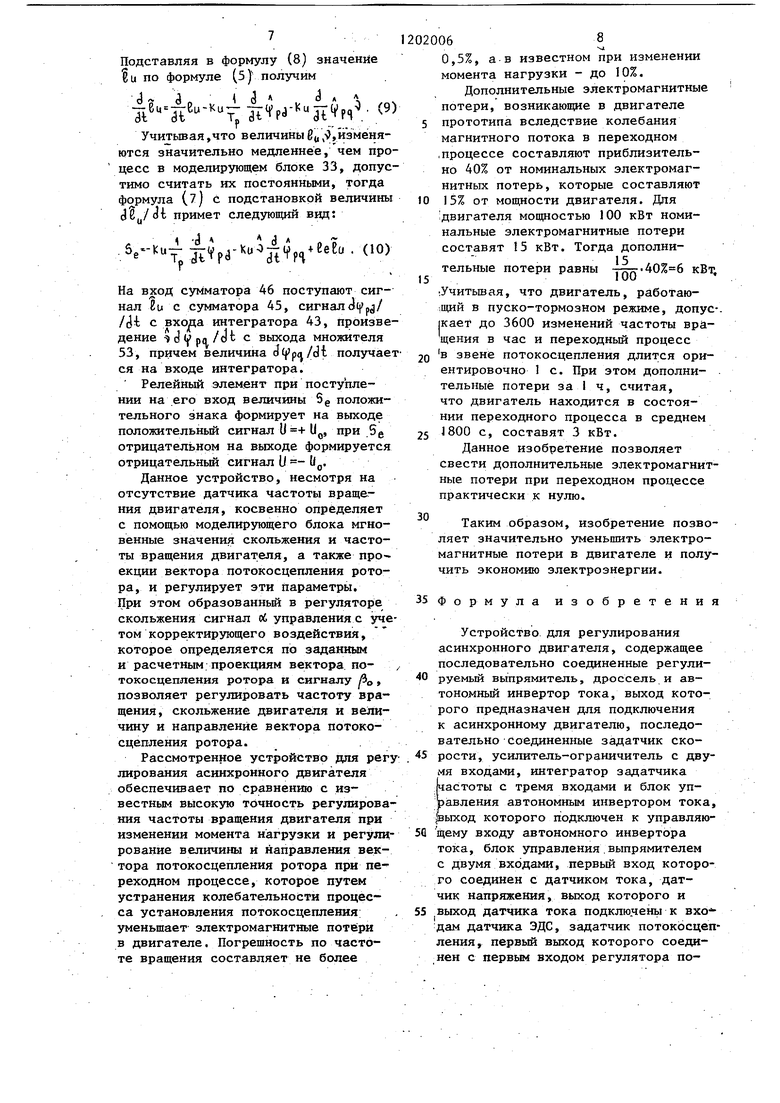
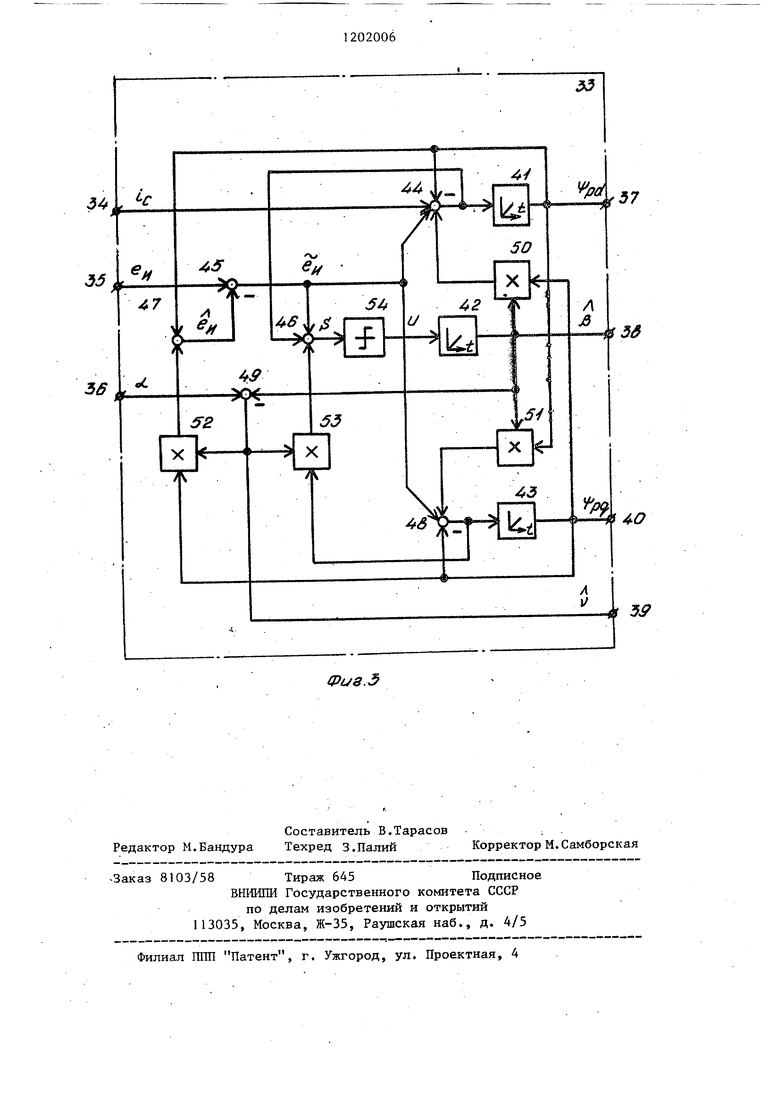
1 Изобретение относится к управлению электрическими машинами и может быть использовано для частотного управления асинхронных двигателей, в которых по условиям эксплуатации Невозможна установка датчиков магнитного потока и частоты вращения двигателя. Цель изобретения - повьшение точности регулирования скорости вращения асинхронного двигателя и уменьщение электромагнитных потерь На фиг. 1 изображена блок-схема устройства для регулирования асинхронного двигателя} на фиг.2регулятор потокосцепленияJ на фиг. 3 - функциональная схема моделирующего блока. Устройство для регулирования асинхронного двигателя содержит последовательно соединенные регулируемый выпрямитель 1, дроссель 2 и автономный инвертор 3 тока, выход которого подсоединен к двигателю 4, последовательно соединенные задатчик 5 скорости, усилитель-огра ничитель 6, имеющий второй вход 7, интегратор 8 задатчика частоты с тремя входами 9, 10 и I1 и блок 12 управления автономным инвертором, выход которого подключен к управляющему входу автономного инвертора 3, блок 13 управления выпрямителем с двумя входами 14 и 15, первый вход 15 которого соединен с датчиком 16 тока, датчик напряжения, выход 17 которого и выход датчика 16 тока соединены с датчиком 18 ЭДС задатчик 19 потокосцепления, выполненный в виде двух функциональных преобразователей 20, 21 первый из которых реализует симметричную функцию типа насыщения, а второй 21 - функцию типа арктангенс, и они образуют первый 22 и второй 23 выходы задатчика потокосцепления, регулятор 24 потокосцепления имеет четыре входа 25, 26, 27, 28 и выход 29, первый вход 25 связан с первым ;Вьгходом 22 задатчика 19 потокосцепления. Задатчик 19 потокосцепления фиг. 2) выполнен на базе двух срав нивающих усилителей 30, 31 и сумматоре 32, входы первого сравнивающего усилителя 30 образуют первый 25 и второй 27 входы регулятора потокосцеплеиия, входьт второго усилит 062 ля 31 - соответственно третий 26 и четвертый 28 входы регулятора потокосцепления, выходы усилителей 30 и 31 подключены к сумматору 32, выход которого 22 подключен к второму входу 10 интегратора 8. Моделирующий блок 33 имеет три входа 34, 35, 36 и четыре выхода 37, 38, 39, 40. Первый вход 35 моделирующего блока соединен с выходом датчика 18 ЭДС, второй вход 34с выходом датчика тока, третий 36 с выходом интегратора 8 задатчика частоты. , Моделирующий блок (фиг. 3) выполнен в виде модели роторной цепи, включающей три интегратора 41, 42 и 43, шесть сумматоров 44-49, четыре множителя 50-53 и двуполярный релейный элемент 54. При этом первый вход 35 моделирующего блока соединен с последовательной цепью - первьй 45 и второй 46 сумматоры, релейный элемент 54 и первый интегратор 42, выход которого подключен к второму 38 выходу моделирующего блока, к входу третьего 49 сумматора и к входам первого 50 и второго 51 множителей, выходы которых соединены соответственно с входами четвертого 44 и пятого 48 сумматоров, второй 34 вход моделирующего блока последовательно соединен с четвертым 44 сумматором и вторым 41 интегратором, выход которого подключен к первому 37 выходу моделирующего блока, к входу второго множителя 51, к входам шестого 47 и четвертого 44 сумматоров, выход последнего соединен с входом второго 46 сумматора, третий вход 36 моделирующего блока соединен с третьим сумматором 49, выход которого подключен к третьему выходу 39 моделирующего блока и к выходам третьего 53 и четвертого 52 множителей, выходы которых соединены соответственно с входами второго 46 и шестого 47 сумматоров, выход первого 45 сумматора подключен к входам четвертого 44 и пятого 48 сумматоров, выход третьего 43 интегратора соединен с четвертым 40 вьгеодом моделирующего блока, с входами первого 50 и четвертого 52 множителей и пятого сумматора 48, выход последнего подключен к входам третьего 43 ийтегратора и третьего 53 множн.теля.
Выход усилителя-ограничителя 6 подключен к входу задатчика 19 потокосцепления и к второму входу14 блока 13 управления вьтрямителем, входы регулятора 24 потокосцепления соединены, третий 26 - с вторым выходом 23 задатчика потокосцепления, четвертый 28 - с четвертым 40 выходом моделирующего блока 33 выходы моделирующего блока 33 подключены: второй 38 - к третьему входу 11 интегратора 8 задатчика частоты; третий 39 - к второму входу 7 усилителя-ограничителя 6.
Функциональные преобразователи 20 и 21 реализуют задания по проекциям вектора потокосцепления ротора
в зависимости от величины В - постоянной составляющей скольжения.
В формулах (1), (2) г , Тр, Кр - сопротивление, постоянная времени и коэффициент связи роторной цепи; i(rtg) - зависимость тока от скольжения для оптимального энергетического режима. Графически зависимость (l) имеет вид симметричной функции типа насьщения, а зависимость (2) имеет вид функции типа арктангенс, с учетом знака минус зеркально повернутой относительно оси абсцис.
В спуско-тормозном режиме устройство для регулирования асинхронного двигателя, работает следующим образом.
Моделирующий блок 33 по сигналам с интегратора 8 задатчика частоты и с датчиков тока 16 и ЭДС 18, соответствующим переменным oi, i. , а , формирует мгновенные расчетные зна чения cкoJIьжeния и , скорости - и проекций (ppj. Ура вектора потокосцепления ротора.
Если напряжение обратной связи по скорости , поступающее на вход 7 усилителя-ограничителя 6, отличается от напряжения -J с задатчика
202006
5 скорости, на выходе усилитешя-ограничителя 6 формируется напряжение рассогласования (-5 -)К, (K const , которое принимается в качестве по5 .стоянной составляющей скольжения /Зд. Этот сигнал, поступая на второй вход 14 блока управления выпрямителем, з аствует в формировании задания ) по току. В блоке
10 13 управления выпрямителем с учетом напряжения обратной связи по току, подаваемому на его вход 15, в результате действия регулятора тока вырабатывается напряжение,воздейtS ствующее на выпрямитель таким образом, что обеспечивается отработка задания по току if.(f). В регуляторе 24 потокосцепления на сравнивающих усилителях 30 и 3 производится вычитание сигналов (f ,Vpj H paiVpa а на сумматоре 32 формируется корректирующее воздействие
(pd- P j) + l((), где 43 t a const), которое при суммировании с обуславливает такую частоту вращения вектора тока статора, при которой вектор потокосцепления ротора If п приближается к его требуемому значению у„,
30 задаваемому проекциями Ci; . V pq На входе интегратора 8 происходит вычисление отклонения
ЬР
ас текущего значения скольжения от задания по этой величине, представляющего собой сумму
,.
При поступлении на вход интегратора 8 отклонения д он осуществляет функцию регулятора скольжения и .формирует частоту таким образом, чтобы отрабатьшать задание и по скольжению. Блок 12 управле-.
45 ния инвертором по сигналу об формирует импульсы отпирания тиристоров инвертора. В результате изменяется частота вращения двигателя 4 до установления заданной величины
50 и заданного скольжения ft, при этом ток двигателя поддерживается равным заданному значению 1(й ). Одновременно происходит процесс установления величины и направления
55 вектора потокосцепления ротора в соответствии с заданными проекциями вектора потокосцепления ротора tp-j ,
Моделирующий блок 33 (фиг. 3) представляет собой модель роторной цепи и формирует расчетные мгновен ные величины скольжения Д., частоты вращения т1 , проекций вектора потокосцепления ротора «j и у р в системе координат, связаннойс векторами тока статора. Величины (fJ р j и Cf pa вычисляются на основе управлений збена потокосцепления асинхронного двигателя, которые представлены следующими уравнениями: ilfr-ffp 5f fvY pVc (3 d л Jf .Vpv-t pJ-Tp P Y (4). где Тр - постоянная времени роторной цепи Кр - коэффициент связи роторной цепи{ г - oMH4fiCKoe сопротивление ро У Jf 2 коэффициенты обратной свя BU отклонение реальной ЭДС, I, от расчетной величины ЭДС 8ц, определяемой формулой М СЧ - fevpj - V сумматор 44 и интегратор 41 реализуют формулу (3), а сумматор 48 и интегратор 43 - формулу (4). На вход сумматора 44 поступают сигнал ig от вход;ной клеммы 34, сигнал от клонения B(j от сумматора 45, сигна (j) р j с выхода интегратора 41 и сиг нал произведения ра вычисленны множителем 50. На выходе интегратора 41 формируется сигнал, пропор циональный проекции потокосцепления у pj. На вход сумматора Л8 поступают сигнал отклонения Сц от сумматора 45, сигнал ( с выхода интегратора 43 и сигнал произведения Я (f, J с выхода множителя , 51. На выходе интегратора 43 получается сигнал, пропорциональный проекции потокосцепления Р и Множи тель 52 формирует прбизведение у.р( из сигнала (/ p(j , поступающего с выхода интегратора 43 Сумматор 4 вычисляет расчетное значение ЭДС 2(, в соответствии с формулой (5). На вход сумматора 47 6 4 поступают сигнал произведения -Э ij) . и сигнал у р с выхода интегратора il. Расчетный сигнал по частоте вращения определяется по формуле -«-, (6) которая реализуется на сумматоре 49, где происходит вычитание сигнала управления частотой вращения двигателя, поступающего с входной . .клеммы 36, и расчетного сигнала уЗ по скольжению, поступающего с выхода интегратора 42. Расчетный сигнал ft по скольжению.формируется на выходе интегратора 42 и вводится в модель роторной цепи в виде переменной, соответствующей реальному скольжению. Если сигнал соответствует реальному скольжению, то и расчетные сигналы, пропорциональные проекциям потокосцепления ротора V „j и. ы .,., „ 7 го I г ч будут равны действительным значениям If р j и (f рд . Тогда отклонение по ЭДС Ец на выходе сумматора 45 будет равно нулю, и сигнал ft на выходе интегратора 42 не будет изменяться, т.е. в установившемся режиме сигнал я на выходе интегратора 42 можно принять за мгновенное значение скольжения. Если , отклонение кц по ЭДС на,выходе сумматора 45 не равно нулю, то схема идентификатора, рассчитанная из условия устойчивосТрН, обеспечивает стремление отклонения Сц к нулю. С точки зрения динамики схема моделирующего блока может быть представлена последовательным соединением колебательного и интегрирующего звеньев. Поэтому при линейной коррекции по отклонению процесс установления скольжения характеризуется колебательностью. Для устранения колебательности вводится релейный элемент 54. На его вход поступает величина Se функция переключения, определяемая по формуле , (7) где Cg const - коэффициент пропорциональности. Величина ( определяется по формуле Л-Д-ib. (8) Подставляя в формулу (8) значение и по формуле (5) получим ., Учитьгоая,что величиныg n- jHSMeHHются значительно медленнее, чем про цесс в моделирующем блоке 33, допус тимо считать их постоянными, тогда формула () с подстановкой величины dl./)t примет следующий вид: -Кио4м„иееЕо . 5.«-Kur TpSIip - Vt fi На вход сумматора 46 поступают сигнал lu с сумматора 45, сигналJifpj/ , с входа интегратора 43, произве дение cj pn/Jt с выхода множителя 53, причем величина e}( получае ся на входе интегратора. Релейный элемент при поступлении на .его вход величины Sg положительного знака формирует на выходе положительный сигнал U + U,, при 5 отрицательном на выходе формируется отрицательный сигнал lig. Данное устройство, несмотря на отсутствие датчика частоты вращения двигателя, косвенно определяет с помощью моделирующего блока мгновенные значения скольжения и частоты вращения двигателя, а также проекции вектора потокосцепления ротора, и регулирует эти параметры. При этом образованньй в регуляторе скольжения сигнал oi управления с уче том корректирующего воздействия, которое определяется по заданным и расчетным проекциям вектора потокосцепления ротора и сигналу уЗ , позволяет регулировать частоту вращения, скольжение двигателя и величину и направление вектора потокосцепления ротора. Рассмотренное устройство для рег лирования асинхронного двигателя обеспечивает по сравнению с известным высокую точность регулирова ния частоты вращения двигателя при изменении момента нагрузки и регули рование величины и направления вектора потокосцепления ротора при пв реходном процессе, которое путем устранения колебательности процесса установления потокосцепления: уменьшает электромагнитные потери в двигателе. Погрешность по частоте вращения составляет не более 068 0,5%, а в известном при изменении момента нагрузки - до 10%. Дополнительные электромагнитные потери, возникающие в двигателе прототипа вследствие колебания магнитного потока в переходном .процессе составляют приблизительно 40% от номинальных электромагнитных потерь, которые составляют 15% от мощности двигателя. Для двигателя мощностью 100 кВт номинальные электромагнитные потери составят 15 кВт. Тогда дополни. кВт. тельные потери равны ,-г. 100 .Учитьшая, что двигатель, работаю:Щий в пуско-тормозном режиме, допус-. |кает до 3600 изменений частоты вращения в час и переходный процесс в звене потокосцепления длится ориентировочно 1 с. При этом дополнительные потери за 1 ч, считая, что двигатель находится в состоянии переходного процесса в среднем 1800 с, составят 3 кВт. Данное изобретение позволяет свести дополнительные электромагнитные потери при переходном процессе практически к нулю. Таким образом, изобретение позволяет значительно уменьшить электромагнитные потери в двигателе и получить экономию электроэнергии. Форму л а изобретения Устройство для регулирования асинхронного двигателя, содержащее последовательно соединенные регулируемый выпрямитель, дроссель и автономный инвертор тока, выход которого предназначен для подключения к асинхронному двигателю, последовательно Соединенные задатчик скороста, усилитель-ограничитель с двумя входами, интегратор эадатчика астоты с тремя входами и блок упавления автономным инвертором тока, ьгход которого подключен к управляющему входу автономного инвертора тока, блок управления.выпрямителем с двумя входами, первый вход которого соединен с датчиком тока, датчик напряжения, выход которого и выход датчика тока подклю.чень к входам датчика ЭДС, задатчик потокосцепления, первый выход которого соединен с первьм входом регулятора потокосцепления; моделирующий, блок с тремя входами и одним выходом, первьй вход которого соединен с выходом датчика ;ЭДС, второй вход - с выходом датчика тока, третий - с выходом интегратора задатчика частоты, а выход соединен с.вторым входом регулятора потокосцепления, содержащего первый сравнивающий усилитель, входыкоторого образуют первый и второй входы регуля тора потокосцепления, о т л и Ч аю щ е е с я тем, что, с целью повы шения точности регулирования скорости и уменьшения электромагнитных потерь, задатчик потокосцепления сн жен вторым выходом и выполнен на дв функциональных преобразователях, пе вый из которых реализует симметричную функцию типа насыщения, а второй - функцию типа арктангенс, в регулятор потокосцепления введены второй сравнивающий усилитель и сум матор, входы которого соединены с выходами первого и второго сравнивающих усилителей, а его выход явля ется выходом регулятора потокосцепления, входы второго сравнивающего усилителя образуют третий и четвертый входы регулятора потокосцепления, моделирующий блок имеет три допол нительных выхода и выполнен в виде модели роторной цепи, включающей три интегратора, четыре множителя, шесть сумматоров и двуполярный релейный элемент, при этом первый вход моделирующего блока соединен с последовательной цепью - первый и второй сумматоры, релейный элемент и первый интегратор, выход которого подключен к второму выходу моделирующего блока, к входу третьего сумматора и к входам первого и второго множителей, выходы которь х соединены соответственно с входй ми четвертого и пятого сумматоров, . второй вход моделирующего блока последовательно соединен с четвертым сумматором и вторым интегратором, выход которого подключен к первому выходу моделирующего блока, к входу второго множителя, к входам шестого и четвертого сумматоров, выход последнего соединен с входом второго сумматора, третий вход моделирующего блока соединен с третьим сумматором, выход которого подключен к третьему выходу моделирующего блока и к входам третьего и четвертого множителей, выходы которых соединены соответственно с входами второго и шестого сумматоров, выход перво-го сумматора подключен к входам четвертого и пятого сумматоров, выход третьего интегратора соединен с четвертым выходом моделирующего блока, с входами первого и четвертого множителей и пятого сумматора, выход последнего подключен к Входам третьего интегратора и третьего множителя, при этом выход усилителяограничителя подключен к входам задатчика потокосцепления и к второму входу блока управления выпрямителем, третий и четвертый входы регулятора потокосцепления соединены соответственно с вторым выходом задатчика потокосцепления ис четвертым выходом моделирующего блока, выход регулятора потокосцепления соединен с вторым входом интегратора задатчика частоты, выходы моделирующего блока подключены: второй - к третьему входу интегратора задатчика частоты, третий - к второму входу усилителя ограничителя.
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866681A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
Изобретение позволяет повысить точность регулирования скорости и уменьшить электромагнитные потери асинхронного двигателя. Устройство для регулирования асинхронного двигателя содержит последовательно соединенщзш регулируемый выпрямитель, дроссель, инвертор, датчик тока и асинхронньШ двигатель, последовательно соединенные задатчик скорости, усилительограничитель, интегратор задатчика частоты и блок управления инвертором. Кроме того, содержит блок управления выпрямителем, связанный с датчиком тока и с усилителемограничителем, задатчик потокосцепления, соединенный через регулятор потокосцепления (РПС) с моделирующим блоком (МБ), входы которого связаны с датчиком тока и через датчик ЭДС - с датчиком напряжения. Входы интегратора задатчика частоты связаны с выходом РПС и § выходом МБ, Положительный эффект достигаетсяза счет того, что МБ (Л формирует .мгновенные расчетные значения скольжения, скорости и проекции вектора потокосцепления ротора, которые в РПС сравниваются с заданными, и полученным сигналом через интегратор задатчика частоты изме- ; tN5 няет параметры вращения двигателя. О ND 3 ил.
Фи8.5
| Устройство для управления асинхроннымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU838997A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Эгштейн И.И.Автоматизированный электропривод переменного тока | |||
| М.: Энергоатомиздат, 1982, с | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
