N)
Изобретение относится к электротехнике и может быть использовано для управления электроприводом сменного ротора центрифуги.
Целью изобретения является умень- .шение эксплуатационных пот.ерь.
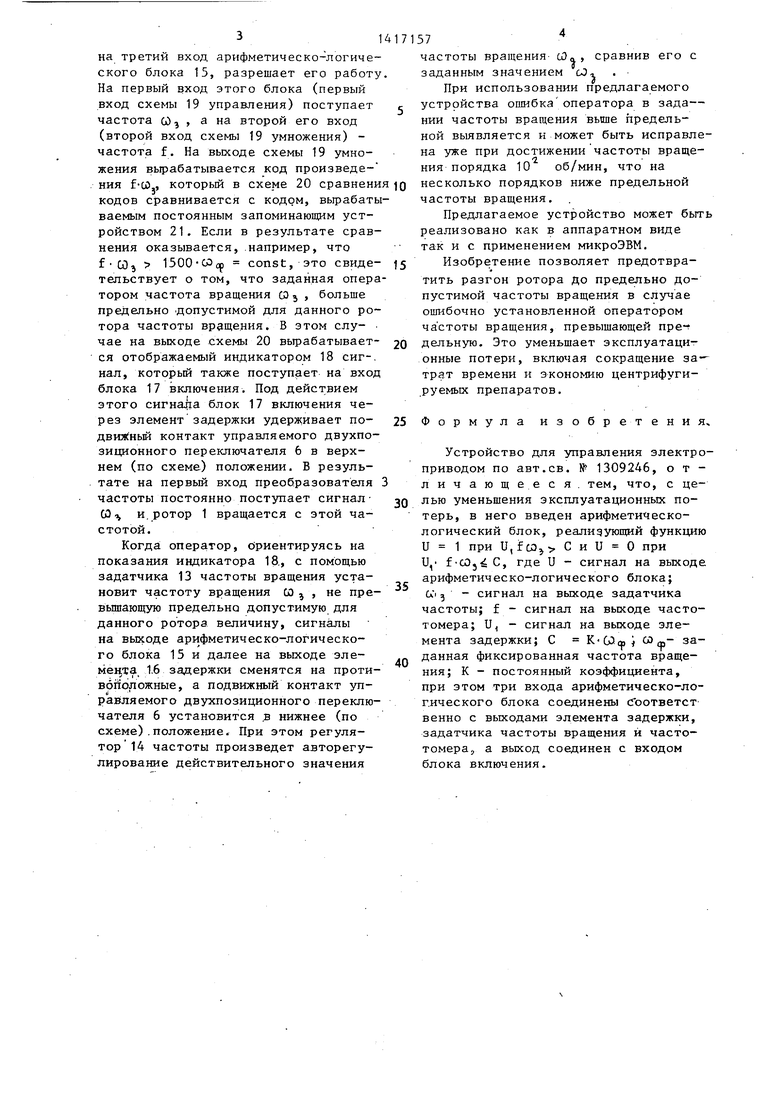
На фиг.1 представлена схема устройства для управления электроприводом; на фиг. 2 - схема арифметиче- ско-логического блока.
Ротор 1 центрифуги приводится во вращение частотоуправляемым электродвигателем 2, напряжение питания которого вырабатывается, преобразовате лем 3 частоты. Устройство содержит задатчик 4 фиксированной частоты вращения, выход которого п одключен к первым входам блока 5 деления и управляемого двухпозиционного пере- ключателя 6, выход которого подключен к первому входу преобразователя 3 частоты. Второй вход преобразователя 3 частоты подключен к- выходу частотного дискриминатора 7, к первому входу которого подключен выход за- датчика 8 предельнсэй частоты меток. Выход блока 5 деления подключен к входу блока 9 памяти, выход которого соединен с первым входом блока 10 умножения. Вторые входы блока 5 деления, блока 10 умножения и частотного дискриминатора 7 соединены с вы ходом частотомера -1 ., вход которого подключен к выходу датчика 12 оптических меток. Выход задатчика 13 частоты вращения подключен к первому входу регулятора 14 частоты, к второму входу которого подключен выход блока 10 умножения, а к выходу - второй вход управляемого двухпозиционного переключателя 6.
Первый вход арифметико-логического блока 15 подключен к выходу задатчика 13 частоты вращения, второй к выходу частотомера 11, а третьи управляющие входы блоков деления 5,, умножения ,10, арифметическо-логиче- ского блока 15 и управляемого двух позиционного переключателя 6 подключены к выходу элемента 16 задержки, вход которого подключен к выходу блока 17 включения. Выход арифмети- ческо-логического блока 15 подключен к входам блока 17 включения и индикатора 18.
Арифметическо-логический блок 15 реализует, функцию U 1 при и, 0 при и, f .«5 U, С
j.
-JQ
1520 2530 - ,50 55
4171572
где и сигнал на выходе арифметиче- ско-логического блока; сигнал на выходе задатчика частоты; f - сигнал на вькоде частотомера; U, - сигнал на выходе элемента задержки; С К СО,,
35
40
45
а со 05 - заданная фиксирования частоты вращения; К - постоянный коэффициент.
Арифметическо-логический блок содержит схему 19 умножения, которая имеет два входа и один выход, подключенный к первому входу схемы 20 сравнения кодов, второй вход которой соединен с выходом постоянного запо.ми- нающего устройства 21, а третий вход- с, выходом элемента 16 задержки.
, Устройство работает следующим образом.
В начале работы блок 17 включения вырабатывает сигнал первоначальной . установки, под действием которого на выходе элемента 16 задержки генерируется единичный сигнал, и подвижный контакт управляемого двухпозиционного переключателя 6 устанавливается в верхнее положение. При этом от задатчика 4 фиксированной частоты вращения через управляемый двухпозицион- ный переключатель 6 на первый вход преобразователя 3 частоты поступает сигнал частоты сОщ, под действием которого соединенный с валом электродвигателя 2 ротор 1 начинает вращаться. .
Датчик 12 оптических меток считывает нанесенные на ротор 1 оптические метки, количество которых на данном роторе характеризует предельно допустимую для него частоту вращения. К моменту времени, когда частота вра- , щения ротора, достигает величины и стабилизируется на ней, частота следования меток достигает в,еличины fg,. При этом блок 5 деления выраба-
тывает значение коэффициента К -,
fop
которое запоминается в блоке 9 памяти и передается на первьй вход блока 10 умножения, на выходе которого разрешается выработка сигнала действительного значения частоты вращения
W K f,
f и с -|-li, где fj, L(p
измеренное частотомером 11 текущее значение частоты следования меток. Одновременно с этим сигнал с выхода элемента 16 задержки, поступающий
3
на третий вход арифметическо-логиче- ского блока 15, разрешает его работу На первый вход этого блока (первый вход схемы 19 управления) поступает частота Q , а на второй его вход (второй вход схемы 19 умножения) - частота f. На выходе схемы 19 умножения вырабатывается код произведе- НИН f CO,, который в схеме 20 сравнени кодов сравнивается с кодом, вьфабаты ваемым постоянным запоминающим устройством 21. Если в результате сравнения оказывается, .например, что f COj 1500 Wop const, это свиде- тельствует о том, что заданная оператором частота вращения СЭ j , больше предельно допустимой для данного ротора частоты вращения. В этом слу- чае на выходе схемы 20 вьфабатывает- ся отображаемый индикатором 18 сиг-, нал, который также поступает на вход блока 17 включения. Под действием этого сигнала блок 17 включения через элемент задержки удерж:ивает по- контакт управляемого двухпо- зиционного переключателя 6 в верхнем (по схеме) положении. В результате на первый вход преобразователя частоты постоянно поступает сигнал- СО-1, и. ротор 1 вращается с этой частотой.
Когда; оператор, ориентируясь на показания индикатора 18., с помощью задатчика 13 частоты вращения уста
новит частоту вращения СО , не пре- вьшающую предельна допустимую для данного ротора величину, сигналы на выходе ари фметическо-логическо- го блока 15 и далее на выходе элемента, 1.6 задержки сменятся на противоположные, а подвижный контакт управляемого двухпозиционного переключателя 6 установится в нижнее (по схеме).положение. При этом регулятор 14 частоты произведет авторегулирование действительного значения
д 5
57
частоты вращения- оЭп сравнив его с заданным значением сО,
При использовании предлагаемого устройства ошибка оператора в зада- НИИ частоты вращения выше предельной выявляется и может быть исправлена уже при достижении частоты вращения порядка 10 об/мин, что на несколько порядков ниже предельной частоты вращения.
Предлагаемое устройство может быть реализовано как в аппаратном виде так и с применением микроЭВМ.
Изобретение позволяет предотвра
тить разгон ротора до предельно допустимой частоты вращения в случае ошибочно установленной оператором ча стоты вращения, превышающей npe-t дельную. Это уменьшает эксплуатационные потери, включая сокращение за-- трат времени и экономию центрифугируемых препаратов.
0
с д f5
25 Формула изобретения.
Устройство для управления электроприводом по авт.св. № 1309246, отличающееся, тем, что, с целью уменьшения эксплуатационных потерь, в него введен арифметическо- логический блок, реалидуюгций функцию и 1 при U,;ftOj С и и О при и, f COji С, где и - сигнал на вькоде арифметическо-логического блока;
U l 5 сигнал на выходе задатчика частоты; f - сигнал на выходе частотомера; и, - сигнал на выходе элемента задержки; С K-Qm i CD «- заданная фиксированная частота вращения; К - постоянный коэффициента, при этом три входа арифметическо-ло- г.ического блока соединены Соответст венно с выходами элемента задержки, задатчика частоты вращения и частотомера, а выход соединен с входом блока включения.
О}
L
Ul
f9
20
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1985 |
|
SU1309246A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2541072C2 |
| Устройство для измерения мощности и герметичности цилиндров двигателля внутреннего сгорания | 1987 |
|
SU1493897A1 |
| Преобразователь угол-фаза-код | 1983 |
|
SU1153335A2 |
| Устройство для осциллографического измерения коеффициента нелинейности сигналов | 1977 |
|
SU732767A1 |
| Способ измерения мгновенных значений частоты электрического сигнала и устройство для его осуществления | 1987 |
|
SU1503022A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 2000 |
|
RU2171753C1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Адаптивное регулирующее устройство | 1982 |
|
SU1064271A1 |
Изобретение относится к электротехнике и может быть использовано для управления сменного ротора центрифуги. Целью изобретения являет ся уменьшение эксплуатационных потерь. Указанная цель достигается введением в устройство для управления электроприводом арифметическо-логи- ческого блока 15, реализующего фун- кцию при U|- f и при .и, f-cOj C, соединенного по входу с задатчиком 13 частоты вращения и- частотомером 11. Выход блока 15 соединен с входами блока 17 включения и индикатора 18. Введение блока 15 дает возможность предотвратить разгон ротора до предельно допусти- . мой частоты вращения в случае ощи- бочно установленной оператором частоты вращения, превышающей предельную. 2 ил. с
дзиг.2
| Устройство для управления электроприводом | 1985 |
|
SU1309246A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
