фиг,
Изобретение относится к самонастраивающимся системам управления и может быть использовано для автоматизации нестационарных технологических процессов с изменяющимся запаздьша- нием, в частности теплоэнергетичес - ких, как в режиме стабилизации параметров, так и отслеживания задающих воздействий.
Цель изобретения - повышение ка- пества регулирования при отработке задающих воздействий.
На фиг. 1 изображена структурная схема адаптивной системы управления для объектов с изменянндимся запаздыванием; на фиг. 2 - функциональная схема блока подстройки запаздь1вания; на фиг. 3 - функциональная схема логического коммутатора.
Адаптивная система (фиг. 1) содержит задатчик 1, сравнивающий элемент 2, регулятор 3, объект 4 управления, блок 5 подстройки запаздыва-. ния, модель 6 с регулируемым запаз- дыванием, упредитель 7, пульт 8 управления, первый переключатель 9, эталонную модель 10 процесса, блок 1 деления, второй переключатель 12, блок 13 умножения и логический ком- мутатор 14.
Блок подстройки запаздывания (фиг. 2) содержит два усилителя 15 ,и 16, первьй триггер 17, дешифратор 18, счетчик 19, задатчик 20 запазды- вания, управляющий генератор 21 опорной частоты, блок 22 регулирования и второй триггер 23.
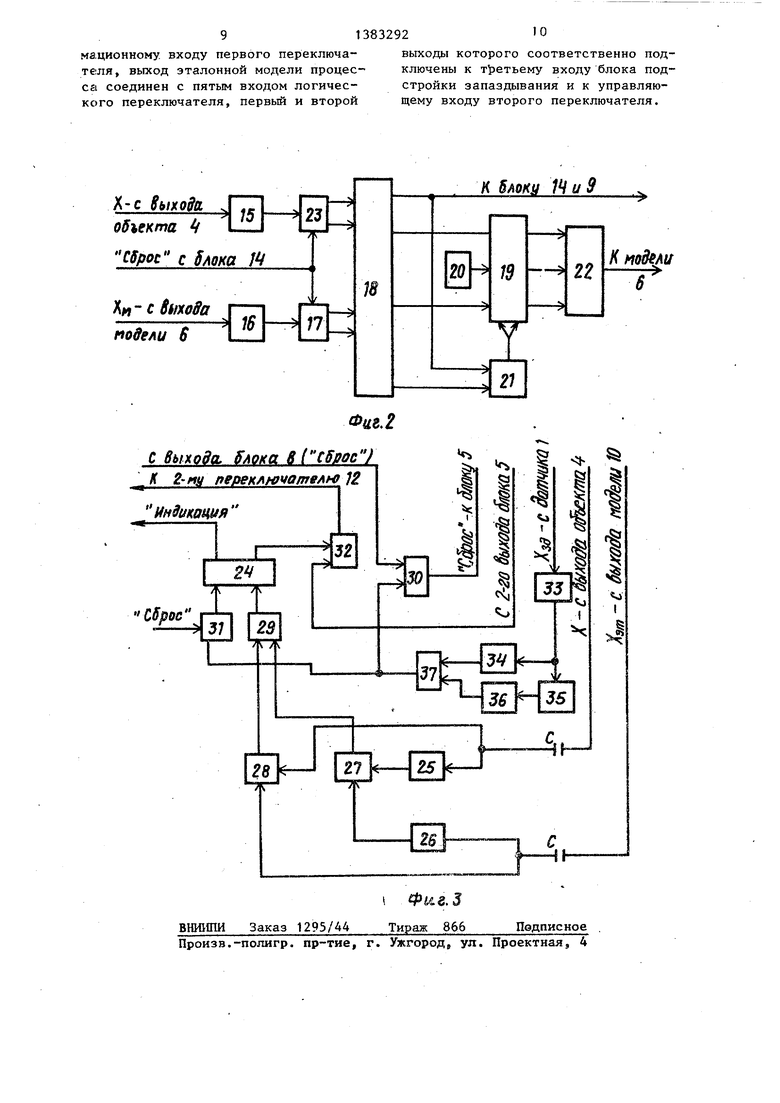
Логический коммутатор (фиг. 3) содержит триггер 24, два инвертирую- вдах усилителя 25 и 26, два компаратора 27 и 28, элементы ИЛИ 29-31, схему 32 совпадения, дифференциатор 33, формирователь 34, инвертирующий усилитель 35, формирователь 36 и элемент ИЛИ 37.
Адаптивная система работает следующим образом.
В основу построения адаптивной системы управления для объектов с изме- няющимся запаздыванием положен принцип упреждения запаздьюания и компенсации инерционности с автоматической адаптивной подстройкой времени запаз датания модели объекта и коэффициен- тон усиления регулятора и упредителя (модели объекта без запаздьшания) путем сравнения кривой переходного процесса замкнутой системы управлени
с эталоном, удовлетворяющим заданному критерию точности и быстродействия при обработке задающих воздействий.
Теплоэнергетические объекты могут быть приближенно описаны с помощью передаточной функции вида -Pto (1)
ит„р
Wo (Р.)
Ь.е
Для упреждения запаздывания и компенсации инерционности должны применительно к схеме на фиг. 1 выполняться следующие условия:
KO
т т
М 0
(2)
где Кир- коэффициент передачи упредителя (модели объекта управления без запаздывания); t M 9 TM - величины запаздывания и
постоянной времени модели объекта управления. Блок 5 подстройки запаздьшания (фиг. 2) предназначен для определени времени запаздьшания объекта 4 управления и адаптивной подстройки запаздьшания в модели 6.
Пульт 8 -управления предназначен для формирования единичного калиброванного скачка в режиме ручкой адаптации (от оператора - О/}, фиг. 1), запуска блока 5 подстройки запаздьшания (через логический коммутатор 14), формирования исходных сбросов и контроля состояния цепи подстройки коэффициента регулятора. Подача калиброванного скачка в виде унифицированного токового сигнала осуществляется оператором. ОдноБре- менно формируется сигнал адаптации, поступающий на третий вход логичес кого коммутатора 14.
Первый переключатель 9 служит для подключения эталонной модели 10 процесса к выходу задатчика 1 и включения ее в работу. Эталонная модель 10 процесса предназначена для формирования эталона переходного процесса Хд в замкнутой системе при изменении задающего воздействия Xi, с задатчика 1 ., Блок 11 деления используется для определения отношения Xj и выхода объекта 4 управления К. Второй переключатель 12 предназначен для коммутации к первому входу
блока 13 умножения либо сигнала, эквивалентного единице, либо сигнала,. поступающего с выхода блока 11 деления. Блок 13 умножения используется для реализации зависимости
ер Eci,,
(3)
где согласно фиг. 1 - ошибка рас- согласования на выходе сравнивающего элемента 2; р ошибка регулирования, поступающая с выхода блока 13 на вход регулятора 3; об - коэффициент подстройки коэффициента усиления регулятора5 эквивалентный выходному сигналу второго переключателя 1:2.
Логический коммутатор 14 служит для анализа изменений сигналов с выходов задатчика 1, объекта 4 уп- равления и эталонной модели 10 процесса, определения моментов переключения первого и второго переключателей 9 и 12, автоматического запуска в работу блока 5 подстройки запаздьшания.
При первоначальном включении системы триггер 24 находится в нулевом состоянии. На время автоматической адаптации времени запаздьшания он устанавливается в сигналом с выхода элемента ИЛИ 37 через элемент ИЛИ 31. При этом с его нулевого выхода подается высокий уровень Индикация, который сигнализирует отсут- ствйе подстройки коэффициента уси-.; ления. Низкий уровень с единичного выхода триггера 24 через схему 32 совпадения передает на вход второго переключателя 12 нулевой сигнал не- зависимо от сигнала на втором входе схемы 32 совпадения (в статическом .состоянии на второй вход схемы 32 совпадения подается высокий уровень) Об изменении задающего воздействия . сигнализирует дифференциатор 33. Прп з еличении задания сигнал положительной полярности проходит через формирователь 34 и элемент ИЛИ 37, а при уменьшении задания - через ин- вертирующий усилитель 35, формирователь 36 и элемент ИЛИ 37. В обоих случаях выходной сигнал элемента ИЛИ 37 подтверждает сброс триггера 24 в О и через элемент ИЛИ 30 посылает сигнал сброса на третий вход блока 5 подстройки запаздьшания из которого с второго выхода на вто- рой вход схемы 32 совпадения подаетс
запрещающий сигнал; Второй вход, элемента ИЛИ 30 (третий вход логического коммутатора) предназначен для ручного запуска блока 5 подстройки запаздывания с пульта 8 управления. Для исходной установки триггера 24 при включении используется второй вход элемента ИЛИ 31. Установка триггера 24 в единичное состояние осуществляется методом сравнения изменения выходного сигнала эталонной модели процесса Хдт с приращением выходного сигнала объекта X по абсолютной величине
/дх,, / /лх/.
(4)
Для этой цели используются разделительные конденсаторы С, инвертирующие усилители 25 и 26, первый и второй компараторы 27 и 28 и элемент ИЛИ 29. При изменении Х, и X в сторону -увеличения срабатывает второ компаратор 28, а в сторону уменьше -. ния - сигна.пы инвертируются усилителями 25 и 26; в этом случае срабатывает первый компаратор 27. Компараторы через элемент ИЛИ 29 устанавливаю триггер 24 в единичное состояние. Так как к этому вр емени на второй вход схемы 32 совпадения поступает разрешающий сигнал, то. переключение триггера 24 в 1 приводит к появлению высокого потенциала на выходе .схемы 32 совпадения. Выключение ком-- параторов происходит при нарушении условия (4), когда в системе возникает переходной процесс. На фиг. 1 f, обозначает внутренние, а f - внешние возмущения, действующие соответственно на вход и выход системы. On- оператор.
В основу адаптивной подстройки времени запаздьшания положен принцип самонастройки по прогнозируемой модечи (2), npn4ehi в первоначальный -момент работы прогнозируемое значение времени запаздывания равно исходному значению, установленному оператором, а в последующие моменты времени - значениям, полученным в предыдущие циклы адаптации. Адаптация времени запаздьшания производится , по формуле
(tj ) i- i Ь (tj ) j ) .
где t: и t:., - текущий и предьщущий циклы адаптации.
при j 1 имеет место цикл адаптации
первоначальный
M(t,)tM(te)±u :r (t,)ro(t,).
где -S-M (te) Величина
,)1
м
а ь (t ; при находится по формуле
)
Л-сГар /Го (t,)(tj)/ .
В исходном статическом состоянии (первоначальном) системой произведен отработка задания , поступающего с задатчика 1, или внутренних возмущений f, или внешних f (фиг. 1). Регулируемая величина X находится в допустимой зоне регулирования. Ошибка рассогласования 0 и ошибка ре гулирования . В блоке 5 под-.;. стройки запаздьшания хранится код запаздывания : при первоначальном включении системы - прогнозируемое
а после адаптивной
значение IS
подстройки Тд, (, . Модель 6с регулируемым запаздьгеанием настроена. Коэффициент подстройки коэффициента усиления регулятора Л 1 при первоначальном включении системы или вС - и; , где об; - значение коэффициента, полученное при изменении задания в i-й момент времени.
В работе систёмьг можно вьщелить четыре режима: адаптация времени запаздьшания, обработки внутренних во«змущений, отработки внешних воз- мутцений и отработки задания с автоматической адаптацией времени запаз- дьтания.
Режим адаптации времени запаздывания осуществляется, оператором (Оп) при установившемся состоянии системы путем подачи единичного калиброванного скачка, либо незначительным и: менением задания с задатчика 1 (фиг. 1). При этом из пульта 8 управления на третий вход логического коммутатора 14 (фиг. 1 и 3) подаПри внешних возмущениях f, их
егся команда Сброс, включающая блок 50 работка осуществляется также по
5 подстройки запаздьшания через его третий вход в режим адаптивной подстройки времени, запаздывания. Сигналы X и Х;ц появляются на выходе объекта и модели соответственно через время запаздьшания Со и « (фиг. 1 и 2). Начало изменения сигналов на выходе объекта 4 и модели
трем KOH i ypaM. Первый более быст действуюкр-гй контур: выход объект сравнивающий элемент 2, блок 13 умножения, регулятор 3, упредите 55 Второй контур: выход объекта 4, сравнивающий элемент 2, блок 13 умножения, регулятор 3 и объект Третий контур: выход объекта 4,
объекта (последовательно соединенные блоки 7 и 6) определяются соответственно с помощью усилителей 15 и 16, которые формируют пороговые сигналы переключения для триггеров 17 и 23 (фиг. 2) практически без задержки. При этом если первым в .единичное состояние устанавливается триггер 17, то м « С о -В этом случае сигналом с второго выхода дешифратора 18 счетчик 19 устанавливается в режим сложения; с управляющего генератора 21 опорной частоты снимается запрет на генерацию ив счетчик 19 заносится дополнительное количество импульсов, пропорциональное Cj, - сГд, . Генерация управляемого генератора 21 в этом случае прекращается, когда триггер 23 также устанавливается в 1, так как при этом с четвертого выхода дешифратора 18 на него поступает запрещакнций сигнал.
Во втором случае счетчик 19 устанавливается в режим вычитания сигналом с третьего выхода дешифратора 18, при этом из содержимого счетчика 19 вычитаются импульсы, т.е. аналогичным образом реализуется зависи30 мость с/о
-См
Установка прогнозируемого (исходного) времени запаздывания & в счетчик 19 производится задатчиком 20 запаздывания. Блок 22 регулирования осуществляет подстройку запаздывания в модели 6, как показано в (2).
Отработка внутренних возмущений f производится через более быстро- действующий контур (упредитель 75. сравнивающий элемент 2, блок 13 згмножения и регулятор 3) и через два контура с запаздыванием с одной стороны объект 4, сравнивакндий элемент 2, блок 13 умножения, регулятор 3, с другой - упредитель 7, модель 6 с регулируемым запаздьшанием, сравнивающий элемент 2, блок 13 умножения и регулятор 3.
При внешних возмущениях f, их отработка осуществляется также по
трем KOH i ypaM. Первый более быстро-. действуюкр-гй контур: выход объекта 4, сравнивающий элемент 2, блок 13 умножения, регулятор 3, упредитель 7. Второй контур: выход объекта 4, сравнивающий элемент 2, блок 13 умножения, регулятор 3 и объект Д. Третий контур: выход объекта 4, срав-.
нивающий элемент 2, блок 13 умножения, регулятор 3, упредитель 7 и модель 6 с р€ .гулируемым запаздыванием. Как при внутренних, так и при внешних возмущениях важно, чтобы сигналы второго и третьего контуров компенсировали друг друга, т.е. X Х„. Однако, при внешних возмущениях f J в частности нагрузкой, буде изменяться время запаздьшания объекта. Поэтому при использовании систем при изменении нагрузки необходимо использовать ручной режим адаптации.
Четвертьш режим работы системы связан с отработкой задающих возмущений XIQ,, т.е. с использованием системы в режиме отслеживания задания. В этом режиме изменение Х асразу
вызьтает изменение и „ , что
равносильно появлению внешних возмущений f2 но с обратным знаком. Сигнал изменения задания воспроизводитс логическим коммутатором 14, который производит сброс блока 5 подстройки запаздывания. При этом блок 5 осуг ществляет адаптацию времени запаздывания так же, как в ручном режиме от оператора. По истечении времени запаздывания Оо разрешающий сигнал с второго выхода блока 5 производит переключение первого переключателя 9 который передает на вход эталонной модели 10 процесса величину изменения задания. При этом на выходе модели 10 начинается переходной процесс. Блок 11 деления находит отношение сигнала X и X , но выходной сигнал об с блока 11 передается через второй переключатель 12 только с приходом разрешающего сигнала с второго выхода логического коммутатора 14. Второй переключатель 12 устанавливается в такое положение, при котором реализуется с помощью блока 13 умножения выражение .(3), что равносильно изменению коэффициента усиления регулятора 3. При этом tL ut-l , которое изменяется только при изменении Хо., которое включает в работу
1ла, которое включает эталонную модель 10 процесса после адаптации времени запаздывания.
Таким образом, введение в адаптивную систему управления пульта управления, первого переключателя5 эталонной модели процесса,- блока деления; второго переключателя, блока умножения и логического коммутатора, связанных между собой и с известными
блоками новыми функционапьньти связями, обеспечивают повьш1ение качества регулирования при отработке задающих воздействий путем автоматической адаптации времени запаздывания модели и коэффициента усиления регулятора.
Формула изобретения
0
5 о с
5
0
0
5
Адаптивная система управления для объектов с изменяющимся запаздыванием, содержащая задатчик, выход которого подключен к пepвo ry входу 5 сравнивающего элемента, регулятор, выход которого через объект управления соединен с первым входом блока подстройки запаздьшания, второй вход которого соединен с выходом модели с регулируемым запаздыванием и с вторым входом сравнивающего элемента, выход регулятора через упредитель соединен с первым входом модели с регулируемым запаздыванием и с третьим входом сравнивающего элемента, четвертый вход которого соединен с выходом объекта управления, а первый выход блока подстройки запаздывания соединен с вторым входом модели с регулируемым запаздыванием, о т л и- ч ающая ся тем, что, с целью повышения качества регулирования при отработке задающих воздействий, в нее введены пульт управления, первый и второй переключатели, эталонная модель процесса, блок деления, блок умножения и логический коммутатор, первьш вход которого подключен к второму выходу блока подстройки запаздывания и к первому управляющему входу первого переключателя, выход которого через эталонную модель прО цесса соединен со своим вторым управляющим входом и с первым входом блока деления, выход которого через второй переключатель соединен с пер- вьм входом блока умножения, второй вход которого подключен к выходу сравнивающего элемента, выход блока умножания соединен с входом регулятора, второй вход логического коммутатора соединен с выходом объекта управления и с вторым входом блока деления, первьш выход пульта управления соединен с пятым входом сравнивающего элемента, а второй выход - с третьим входом логического коммутатора, четвертый вход которого подключен к выходу задатчика и к информационному входу первого переключа-выходы которого соответственно подте ля, выход эталонной модели процес-ключены к т ретьему входу блока подса соединен с пятым входом логичес-стройки запаздывания и к управляюкого переключателя, первый и второйщему входу второго переключателя.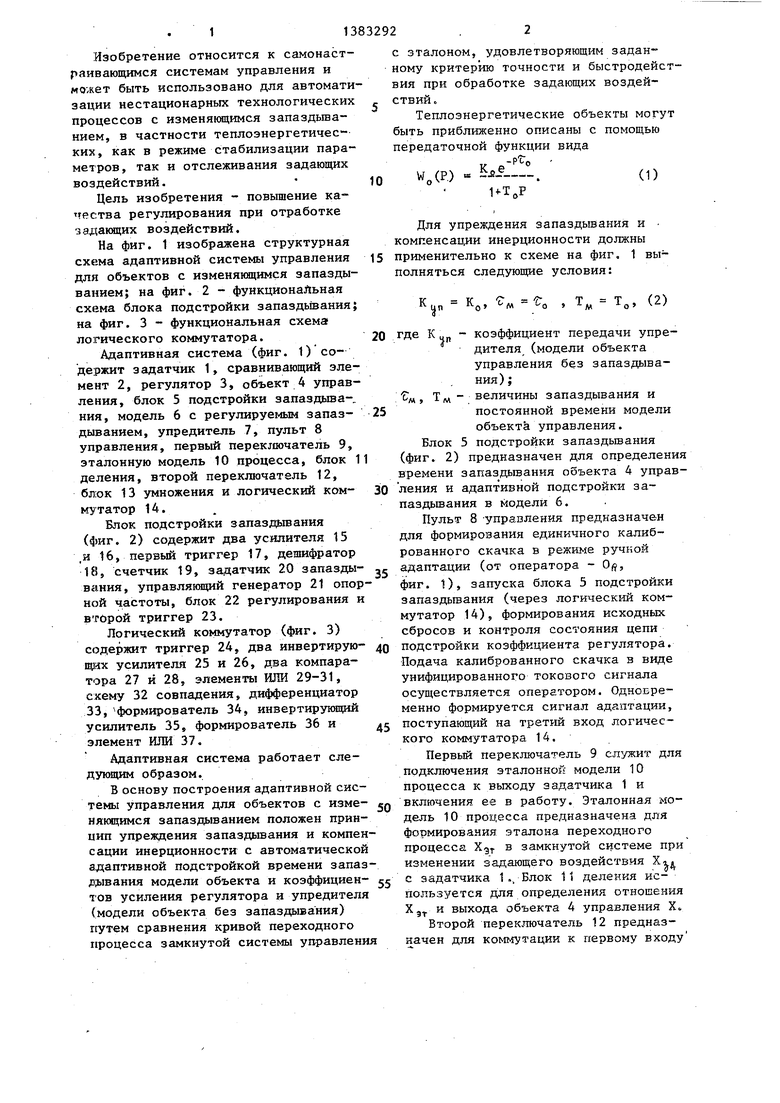



| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Адаптивная система управления для объектов с запаздыванием | 1980 |
|
SU1015336A1 |
| Адаптивная система управления | 1983 |
|
SU1174902A1 |
| Адаптивная система регулирования для объектов с изменяющимся запаздыванием | 1980 |
|
SU968788A1 |
| Способ и система адаптивного управления загрузкой дробилки | 1985 |
|
SU1251952A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ПЕРЕМЕННЫМ ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 2003 |
|
RU2258950C2 |
| Адаптивная система управления для объектов с запаздыванием | 1983 |
|
SU1161917A1 |
Изобретение относится к самонастраивающимся системам управления и может быть использовано для автоматизации нестационарных технологических процессов. Цель изобретения - повьше- ние качества регулирования при отработке задающих воздействий. Устройство содержит задатчик 1, сравнивакиций элемент 2, регулятор 3, объект 4 управления, блок 5 подстройки запаздывания, модель 6 с регулируемым запаздыванием, упредитель 7, пульт 8 управления, два переключателя 9, 12, эталонную модель 10 процесса, блок 11 деления, блок 13 умножения и логический коммутатор 14. В основу изобретения положен принцип упреждения запаздывания и компенсации инерционности объекта управления путем сравнения кривой переходного процесса с эталоном, а также реализован процесс адаптивной подстройки коэффициентов усиления регулятора. 3 ил. § СЛ
.2 с выхода. SAOKU SC CSffoc }
НЬ
27
/
.
t
.
±
Э
-р-itt
Пл
ЖНМ
IFV
| Дралюк Б.И., Синайский Г.В | |||
| Системы автоматического управления С транспортным запаздыванием | |||
| - М.: Энергия, 1969 | |||
| Адаптивная система регулирования для объектов с изменяющимся запаздыванием | 1980 |
|
SU968788A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
