4
СО
го
4 01
СУ5
14)
Изобретение относится к теплоэнергетической и химической технике, может найти широкое применение при регулировании диаметра кабеля и являет- - ся усовершенствованием регулятора по авт, св. № 631864.
Цель изобретения - повышение точности регулятора.
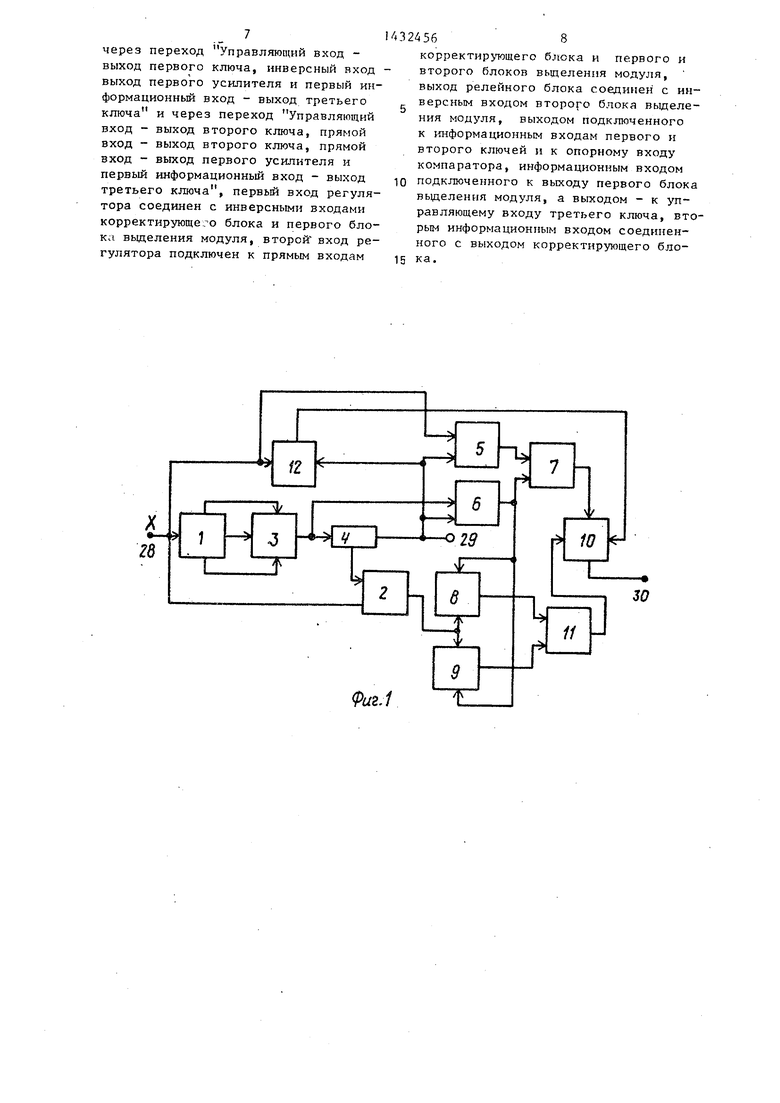
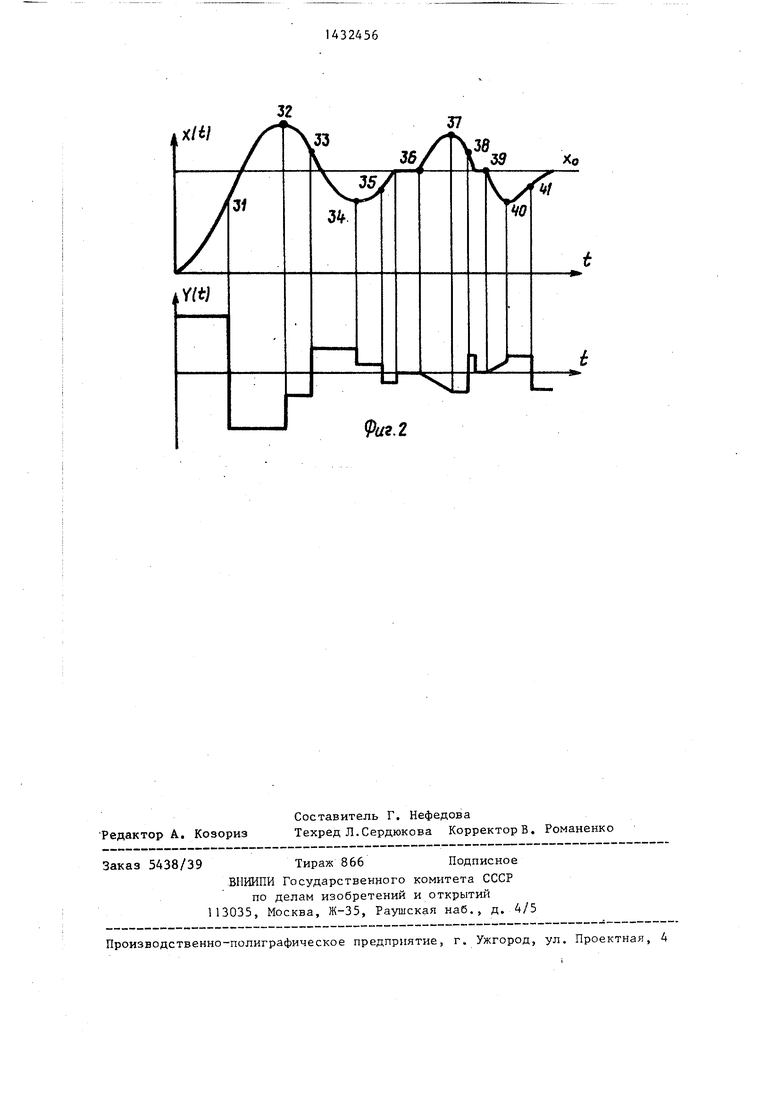
На фиг. 1 показана структурная ю схема регулятора; на фиг. 2 - эпюры сигналов, поясняющих работу регулятора; на фиг. 3 - принципиальная схема регулятора.
Регулятор содержит индикатор 1 15 экстремумов, нуль-орган 2, релейный блок 3, сумматор А, первый 5 и второй 6 блоки вьщеления модуля, компаратор 7,.первый 8, второй 9 и третий 10 ключи, первый 11 и второй 12 уси- 20 лители, элемент 13 запоминания максимума, элемент 14 запоминания минимума, усилители-повторители 5 и 16, реле 17, пневмоемкость 18, элемент 19 сравнения, дроссели 20 и 21, эле- 25 менты 22 и 23 сравнения, дроссель 24, элемент 25 сравнения, дроссель 26, элемент 27 сравнения, первый 28 и второй 29 входы и выход 30 регулятора, точки 31 - 41 на эпюрах сигна- 30 лов.
На фиг, 2 приняты обозначения: Х,д - сигнал задания; X - текущее значение регулируемой переменной; Y - выходной сигнал регулятора; Р - сигналы смещения.
В регуляторе реализуется алгоритм
BIsignM, если Mi О, В2, если Ml О,
где В1 KlXo- Xpl, М Х„н-л.(Хд-Хо)-Х,
В2 Kl (Хо- X), (
(либо В2 KI(XO- X) + К2 j (X(,-X)dt)j
где Ml 1Хо- ХзЫХ„- Xjj; ° 45 XQ сигнал задания; X - текуш,ее значение регулируемой переменной; Х} - экстремальное значение регулируемой переменной; 50 К, К1, К2, У - постоянные коэффициенты.
Известный регулятор является релейным регулятором с отрицательным гистерезисом, т.е. его переключения - происходят с опережением по отноше- Н1-ПО к сигналу задания или с недоходом регулируемой переменной до
5 0 5 0
0
5 0
задания. Поэтому, хотя в нем и отсутствуют датчики производных, в. системе регулирования, содержащей такой регулятор, достигается эффект, подобный тому, как если бы такие датчики в системе были.
В предлагаемом регуляторе это свойство сохраняется. Но дополнительно в нем обеспечивается автоматическое изменение величины полки реле, т.е. величина его выходного сигнала меняется пропорционально разности сигнала задания и экстремального значения регулируемой переменной. Релейное управление позволяет реализовать предельно возможные по показателям качества характеристики процесса регулирования, естественно, с учетом ограничений на допустимые отклонения регулируемой пэременной и амплитуды управляющего воздействия. В результате в системе с данным регулятором уменьшается величина динамической ошибки по сравнению с системами, содержащими линейный регулятор. В связи с тем, что величина релейного управляющегр воздействия есть величина переменная (уменьшается с уменьшением максимального по модулю отклонения регулируемой координаты от задания), то это приводит к устранению автоколебаний в системе.
Кроме того, введение в релейный регулятор корректирующего блока с пропорциональной (или ПИ, ПИД и т.д.) характеристикой обеспечивает необходимую точность-регулятора Е статическом режиме работы, а также работоспособность регулятора в условиях действия возмущений.
Сущность работы алгоритма поясняется фи г, 2, на которой показаны возможные изменения сигнала задания Хд и регулируемой переменной X и соответствующие им изменения выходного сигнала Y регулятора. Тогда на участке до точки 31 выходной сигналY равен Y K( X,) КХ, так как X3 Х(0) 0. Положение точки 3 определяется настройкой коэффициента } з точке 31 М (1 - y) X - 0. На участке от точки 31 до тетки 32 .Y , так как М i 0„ На участке от точки 32 до точки 33 Y , а на участке от точки 33 до точки 34 Y +К1Хо- и т.д. А на участках от точки 39 до точки 40 и от точки 40 до точки 41 Y Kl (Хс,- X), так
как на этих участках М (( j
XI)-.40.
Таким образом, регулятор работает как дискретно-непрерывный. При этом процесс регулирования разбивается на два этапа: на первом, когда Х;,/ X и Ml О, осуществляется, релейное управление, и величина управляющего воздействия пропорциональна IX,- Q на втором этапе, когда Ml - О, осуществляется непрерывное управление до момента времени прохождения регулируемой переменной X экстремального значения,
На фиг. и 3 приведен пример конкретного выполнения регулятора на пневматических элементах УСЭППА. Нуль-орган 2 (фиг. 1) осуществляет сравнение двух сигналов. На его пря- 20 мой вход поступает сигнал (I - у)Хр+
нается на втором выходе индикатора экстремумов, при этом дискретный сигнал равен О, а на первом выход сигнал становится равным текущему значению регулируемой переменной X.
На фиг. 3 в развернутом виде пок зан индикатор 1 экстремумов, блоки 5 и 6 выделения модулей. Индикатор экстремумов содержит элемент 13 запоминания максимума, элемент 14 запоминания минимума, усилители-повто рители 15 и 16, реле 17, пневмоем- кость 18 и элемент 19 сравнения. Пр 5 достижении регулируемой переменной
+ г АЗ, а на инверсный - регулируемая переменная X. Первый сигнал фор- мир /ет сумматор 4, на первый вход которого подается сигнал Х а на второй - экстремальное значение регулируемой переменной Х. Релейный блок 3 осуществляет коммутацию двух сигналов X . и Х, на свой выход по сигналу с выхода индикатора 1 экстремумов. Первый 8 и второй 9 ключи осуществляют коммутацию своего входного сигнала на свой выход таким образом, что при наличии единичного управляющего сигнала с выхода нуль- органа 2 первый ключ 8 открыт, второй ключ 9 закрыт, а при его отсутствии первый ключ 8 закрыт, второй к.гпоч 9 открыт. Третий ключ 10 работает по аналогии с релейным блоком 3, пропуская на свой выход либо сигнал с выхода усилителя 11 , либо, с выхода корректирующего блока 12 по сигналу с выхода компаратора 7. Последний осуществляет сравнение двух сигналов и формирует на своем выходе сигнал 1 или О в зависимости от ре30
35
40
45
X значения X
,VtCl кС
(или Хл,ын) элемент
19 сравнения срабатьшает, переключа реле 17. Это приводит одновременно к запоминанию сигнала Х. в элементе 13 запоминания максимума (есл до этого сигнал X Х) и коммута
ции сигнала X
ММН
в отрицательную ка
меру элемента 19 сравнения, или, на оборот, запоминанию сигнала Хд,нм Р 25 элементе 14 запоминания минимума (е ли до этого сигнал X Х) и ком мутации сигнала X „ в отрицательн камеру элемента 19 сравнения. Блоки 5 и 6 выделения модуля разности двух сигналов содержат дроссели 24 26 и элементы 25 и 27 сравнения.
В качестве корректирующего блока 12 используется усилитель разности двух сигналов, образованный дросселем 21 и элементом 23 сравнения, В усилитель 11 ив корректирующий блок 12 введены сигналы смещения Р, поскольку в 1невмоавтоматике нет отрицательных сигналов.
Работу регулятора рассмотрим в предположении, что регулируемая переменная X меняется так, как пока- зано на фиг. 2.
При включении регулятора в работ
на выходе элемента 19 сравнения фор мируется сигнал 1, так как регули
руемая переменная X, заведенная в зультата сравнения. Индикатор i зкст- положительную камеру элемента 19 ремумов осуществляет запоминание на сравнения, больше сигнала в отрица- первом и втором выходах либо сигна- тельной камере этого элемента. Выла Х„«„г либо сигнала ,, и форми- 0 ходной сигнал элемента 19 сравнения
закрьшает нижний контакт реле 17 и открьшает его верхний контакт, что
, n /lOJIлc,л ч,шлс.л л (,« ПРИВОДИТ К запоминанию сигнала па он запоминается. При этом дискретный сигнал равен 1, а на втором релей- ном выходе действует текущ.ее значение регулируемой переменной X. Если сиг, ч,«1 XJOO.U t „ц „
рование на своем третьем выходе дискретного сигнала О или I. При этом, если появляется сигнал X
выходе усилителя-повторителя 16. Этот сигнал через открытый нижний контакт релейного блока 3 проходит на вход сумматора 4, на выходе которого устанавливается сигнал (l-j)Xj,,
нал X XI
то этот сигнал запомиQ
0
нается на втором выходе индикатора I экстремумов, при этом дискретный сигнал равен О, а на первом выходе сигнал становится равным текущему значению регулируемой переменной X.
На фиг. 3 в развернутом виде показан индикатор 1 экстремумов, блоки 5 и 6 выделения модулей. Индикатор экстремумов содержит элемент 13 запоминания максимума, элемент 14 запоминания минимума, усилители-повторители 15 и 16, реле 17, пневмоем- кость 18 и элемент 19 сравнения. При 5 достижении регулируемой переменной
0
5
0
X значения X
,VtCl кС
(или Хл,ын) элемент
19 сравнения срабатьшает, переключая реле 17. Это приводит одновременно к запоминанию сигнала Х. в элементе 13 запоминания максимума (если до этого сигнал X Х) и коммутации сигнала X
ММН
в отрицательную камеру элемента 19 сравнения, или, наоборот, запоминанию сигнала Хд,нм Р 5 элементе 14 запоминания минимума (если до этого сигнал X Х) и коммутации сигнала X „ в отрицательную камеру элемента 19 сравнения. Блоки 5 и 6 выделения модуля разности двух сигналов содержат дроссели 24 и 26 и элементы 25 и 27 сравнения.
В качестве корректирующего блока 12 используется усилитель разности двух сигналов, образованный дросселем 21 и элементом 23 сравнения, В усилитель 11 ив корректирующий блок 12 введены сигналы смещения Р, поскольку в 1невмоавтоматике нет отрицательных сигналов.
Работу регулятора рассмотрим в предположении, что регулируемая переменная X меняется так, как пока- зано на фиг. 2.
При включении регулятора в работу
45
на выходе элемента 19 сравнения формируется сигнал 1, так как регулиПРИВОДИТ К запоминанию сигнала па
выходе усилителя-повторителя 16. Этот сигнал через открытый нижний контакт релейного блока 3 проходит на вход сумматора 4, на выходе которого устанавливается сигнал (l-j)Xj,,
Этот сигнал поступает на инверсный вход нуль-органа 2, на выходе которого формируется сигнал 1,
Выходной сигнал нуль-органа 2 переключает первый 8 и второй 9 ключи так, что на прямой вход усилителя 11 проходит сигнал | с выхода элемента 6 вьщеления модуля. Выходной сигнал усилителя 11 через тре тий ключ 10 проходит на выход регулятора 30. Второй информационный вход ключа 10 коммутируется с его выходом, так как выходной сигнал компаратора 7 равен О, поскольку выходной сигнал второго блока 6 выделения модуля, равный Х,, больше выходного сигнала первого блока 5 выделения, модуля. Если это не так, выходной сигнал компаратора 7 переключает третий ключ 10 и на выход регулятора 30 проходит сигнал с выхода усилителя 12.:
В точке 31 (фиг. 2) срабатывает нуль-орган 2, так как сигнал на вы- ходе сумматора 4 становится равным регулируемой переменной X. Это приводит к переключени о первого 8 и второго 9 ключей и. подаче выходного сигнала второго блока 6 вьделения модуля на инверсный вход усилителя 11. В точке 32 (фиг. 2) изменяется выходной сигнал второго блока 6 выделения модуля, что приводит к изменению уровня выходного сигнала регулятора. В точке 33 вновь срабатывает нуль-орган- 2, и цикл работы регулятора повторяется. В точке 36 (фиг. 2 выходной сигнал первого блока 5 выделения модуля становится больше выходного сигнала второго блока 6 выделения модуля. На выходе компаратора появляется сигнал 1, переключающий третий ключ 1 О, и к выходу регулятора 30 подключается выход корректирующего блока 12. Далее цикл повторяет ся, начиная с точки 37 (фиг. 2).
Коэффициент К усилителя 11 выбирают так, чтобы величина управляющего воздействия при максимальном из области допустимых отклонений I -Xj |j;jp(. равнялась своему предельно допустимому значеник} (в реальной системе всегда имеет место ограничение на величину управляющего воздействия) Коэффициент 7 ыбирают так, чтобы при максимальном из области допустимых отклонений переменной от за
5 о
5
0
5
дания экстремум переменной появлялся в окрестности задания.
Предельные возможности предлагаемого регулятора по уменьшению динамической ошибки реализуются в системе с линейным объектом второго порядка при его переводе из заданного стабилизированного состояния в предписанное стабилизированное конечное состояние. В этом сл -чае время регулирования t Т, где Т - минимально возможное время регулирования при максимальном, из области допустимых, отклонении регулируемой координаты от сигнала задания Х с учетом огра- на управление.
Предлагаемый регулятор в системах с объектом высокого порядка является грубым как к параметрическим, так и сигнальным возмущениям. Это свойство обеспечивается автоматическим изменением зоны гистерезиса и величины управляющего воздействия.
На протяжении всего управления регулятор работает как релейный. Выход корректирующего блока 12 подключается к выходу регулятора 30 лишь в конце управления, когда X Х Xj, либо когда движение начинается из точки X X|3 Xj, Выбор типа корректирующего блока 12 (П-или ИИ- блок ) обусловлен типом объекта (если объект статический - корректирующий блок 12 имеет ИИ-характеристику, если астатический - корректирующий блок 12 - П-характеристику) и связан с ликвидацией статической ошибки при действии возмущ,ений как со стороны задания, так и со стороны нагрузки.
Использование предлагаемого регулятора взамен стандартных типовых пропорциональных и ПИ-регуляторов позволит получить экономический эффект в народном хозяйстве за счет увеличения точности регулирования.
Формула изобретения
0
Регулятор с релейной характеристикой по авт. св. № 631864, о т л и - чающийся тем, что, с целью повышения точности, в нем дополнительно установлены первый н второй блоки выделения модуля, усилительj корректирующий блок ч первый,, второй, и третий ключи, причем выхрд нуль- органа подключен к выходу регулятора
через переход Управляющий вход - выход первого ключа, инверсный вход выход первого усилителя и первый ин- формационньш вход - выход третьего ключа и через переход Управляющий вход - выход второго ключа, прямой вход - выход второго ключа, прямой вход - выход первого усилителя и первый информационный вход - выход третьего ключа, первый вход регулятора соединен с инверсными входами корректирующего блока и первого бло- км выделения модуля, второй вход регулятора подключен к прямым входам
324568
корректирутощего блока и первого и второго блоков вьзделения модуля, выход релейного блока соединен с ин- версным входом второ о блока вьщеле- ния модуля, выходом подключенного к информационным входам первого и второго ключей и к опорному входу компаратора, информационным входом 10 подключенного к выходу первого блока выделения модуля, а выходом - к управляющему входу третьего ключа, вторым информационным входом соединенного с выходом корректирующего бло- 15 ка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с релейной характеристикой | 1988 |
|
SU1585778A2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2003 |
|
RU2242039C2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| Регулятор с релейной характеристикой | 1987 |
|
SU1418648A2 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1994 |
|
RU2113005C1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2005 |
|
RU2302029C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
Изобретение относится к теплоэнергетической и химической технике и может найти применение при регулировании диаметра кабеля. Целью изобретения является повышение точности регулятора. Регулятор содержит йвдикатор 1 экстремумов, нуль-орган 2, релейный блок 3, сумматор 4, блоки 5 И 6 вьщеления модуля, компаратор 7, ключи 8-10, усилители 11 и 12, элементы запоминания максимума 13 и минимума 14, усилители-повторители 15 и 16, реле 17, пневмоемкость 18, элементы сравнения 19,27,22,23, 25 и дроссели 20,21,26,24, Регулятор работает как дискретно-непрерьшный. При этом процесс регулирования разбивается на два этапа: на первом, когда XQ/ Xj X Ml О, осуществляется релейное управление,и величина управляющего воздействия пропорциональна (Xjj- Xj), на втором этапе, когда Ml 0, осуществляется непрерывное управление до момента времени прохождения регулируемой переменной X экстремального значения. 3 ил. (Л
26
Хо
Р(/г.2
| Регулятор с релейной характеристикой | 1976 |
|
SU631864A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
