(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЛАНИРОВАНИЯ ТОПОЛОГИИ ЛОГИЧЕСКИХ ИНТЕГРАЛЬНЫХ СХЕМ | 2012 |
|
RU2530275C2 |
| Генератор случайных сигналов, связанных цепью Маркова | 1988 |
|
SU1659999A1 |
| Устройство для отображения информации | 1984 |
|
SU1234873A2 |
| Устройство для определения оптимального дерева связности графа | 1990 |
|
SU1817089A1 |
| ЛОГИЧЕСКОЕ УСТРОЙСТВО | 1970 |
|
SU276525A1 |
| Устройство для ввода информации | 1986 |
|
SU1376076A1 |
| Устройство для преобразования телеграфного кода в видеокод | 1985 |
|
SU1314461A1 |
| Устройство для проверки модулей коммутации | 1985 |
|
SU1283997A1 |
| Устройство для отображения информации | 1988 |
|
SU1511764A2 |
| АССОЦИАТИВНЫЙ КОММУТАТОР | 1991 |
|
RU2101760C1 |
Изобретение относится к электронному моделированию и может быть использовано при решении задач выбора параметров для контроля работоспособности технических объектов и для определения стратегии контроля. Целью изобретения является расширение области применения за счет моделирования процесса выбора взаимозависимых параметров. Для этого устройство содержит коммутационные мат рицы, блок ключей, источник 4 напряжения, блок 5 компараторов, блок 6 формирователей импульсов, элементы РШИ 7, 10, элемент И 11, ждущий мультивибратор 8 и RS-триггер 9. 2 ил. 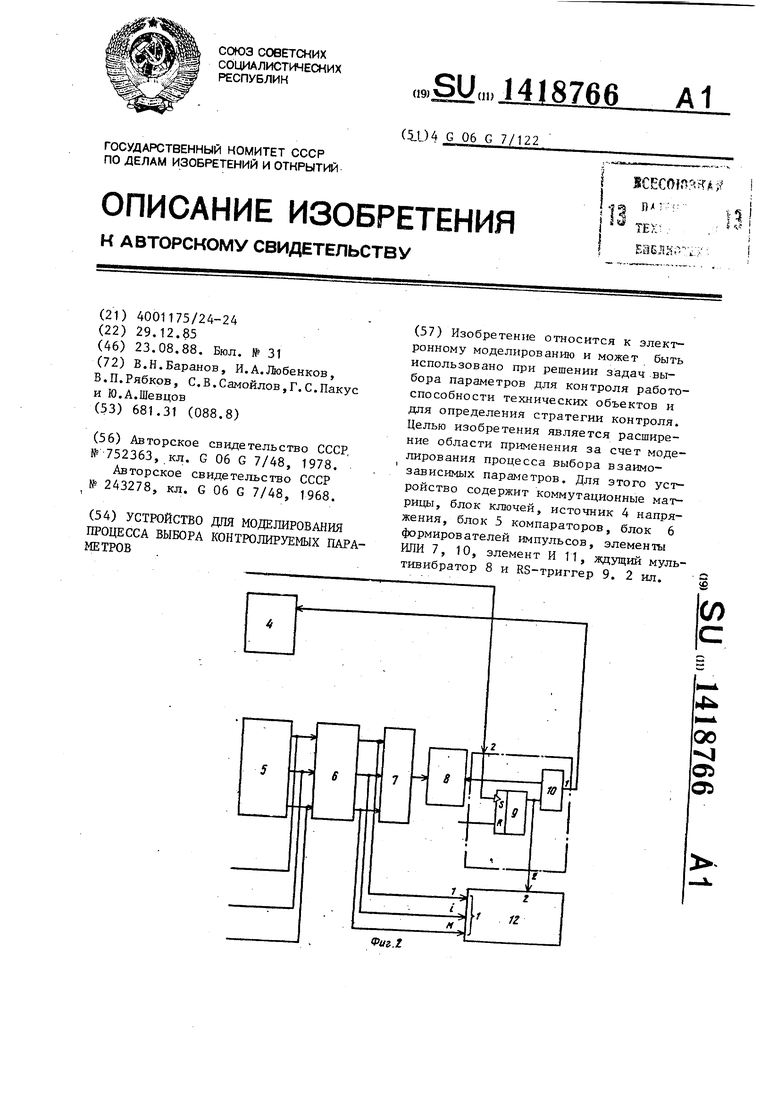
(Х
vi
О5 О
Изобретение относится к электронному моделированию и может быть ис- Ьользовано при моделировании и решении задач выбора параметров для контроля работоспособности технических объектов и для определения оптимальной стратегии контроля.
Целью изобретения является рас- . ширение функциональных возможностей стройстжа за счет моделирования про- цесса выбора взаимозависимых пара- Петров.
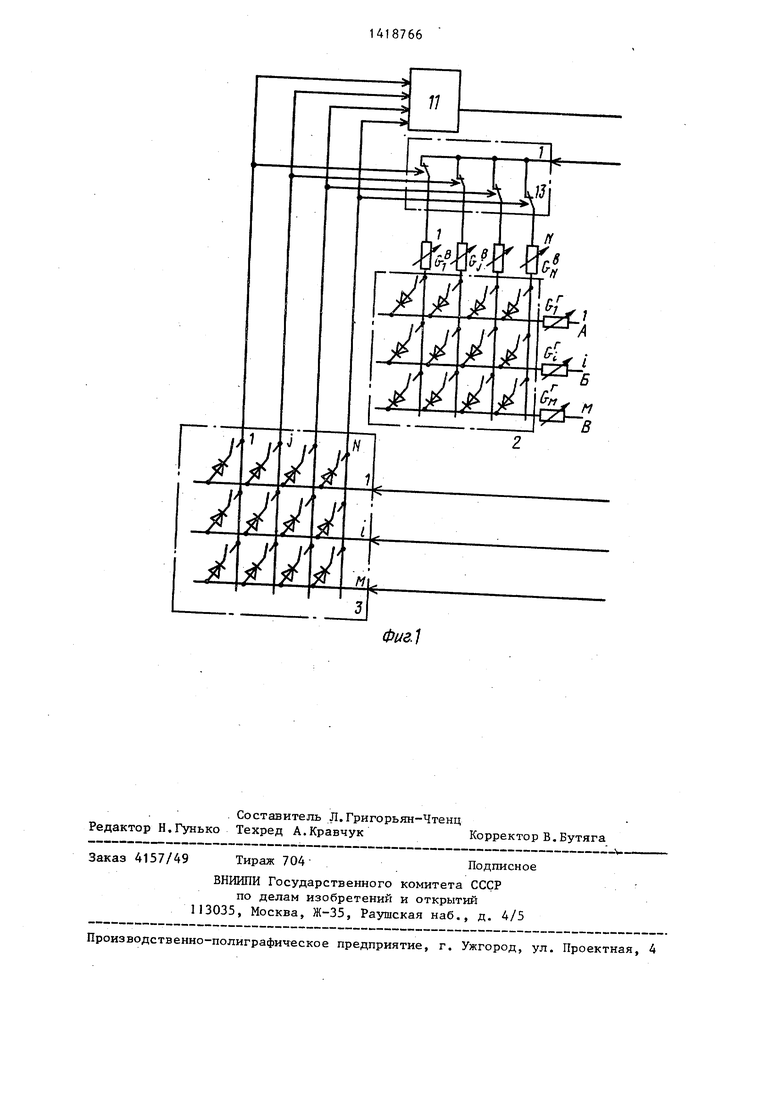
; На фиг.1 и 2 представлено предла- |гаемое устройство.
; Устройство содержит блок 1 ключей, Iпервую 2 и вторую 3 коммутационные матрицы, источник 4 напряжения, блок 5 компараторов, блок 6 формировате- лей импульсов, первый элемент ИЛИ 7, ждущий мультивибратор 8, RS-триггер 9, второй элемент ИЛИ 10, элемент И 11, блок 12 индикации, управляемые резисторы 13. При. этом выходы ключей подключены через резисторы 13 кстолб- цам матрицы 2, строки матрицы 3 объе- с входами блока 6 формирователей сигналов и соединены с выходами блока 5 компараторов, входа которого подключены к строкам матрицы 2. Выходы блока 6 формирователей соеди- иены с входами первого элемента ИЛИ 7, выход которого через ждущий муль- тивибратор 8 подключен к второму вхо- ду второго элемента ИЛИ 10, первый вход которого объединен с управляющим входом блока 12 индикации и соединен с выходом RS-триггера 9. Выход второго элемента ИЛИ. 10 подключен к входу источника 4 напряжения, выход которого соединен с информационным входом блока 1 ключей. Столбцы матрицы 3 подключены к управляющим входам блока 1 ключей и к входам элемента И 11, выход которого соединен с S-входом RS-триггера 9.
Устройство работает следующим образом.
В исходном состоянии матрицы 2 и 3 коммутируются в соответствии с таблицей проверок таким образом, что если элемент а-. таблицы проверок равен 1, соответствующий ключ диодной матрицы между i-й строкой j-м столбцом замкнут. Если а-- равно О, ключ разомкнут.
При непересекающихся параметрах объекта контроля каждый столбец таблицы проверок содержит не более од
а ..
11
ного единичного элемента, а при пересекающихся - в та блице имеются столбцы, содержащие две и более единицы.
В исходном состоянии все ключи блока 1 ключей замкнуты, и питание от источника 4 после сигнала Пуск подается на каждый столбец матрицы 2.
Ток в каждой строке матрицы 2 определяется суммарной величиной проводи- мостей, подключенных к данной горизонтальной шине.
Объект контроля, имеющий М параметров и N элементов, описывается при допусковой оценке параметров таблицей проверок - прямоугольной матрицей булевых элементов lAl , каждой строке которой соответствует
параметр объекта контроля, а столбцу - элемент, причем
tl, если 3-й элемент проверяется i-M параметром, О, в противном случае.
Блок 5 компараторов состоит из М отдельных токовых компараторов, каждый из которых подключен к соответствующей строке матрицы 2. Первым срабатывает i-м компаратор, соответствующий строке с максимальным током. Управляющий сигнал с первого выхода этого компаратора поступает на ждущий мультивибратор 8 через блок 6 формирователей и элемент ИЖ 7. После срабатывания i-й компаратор самоблокируется по питанию и остается включенным до окончания моделирования. Ждущий мультивибратор 8 через элемент ИЛИ 10 отключает источник 4 на время, определяемое характеристиками ждущего мультивибратора.
Управляющий сигнал с второго выхода i-ro компаратора поступает на i-ю строку матрицы 3 и на i-й вход блока 12 индикации. В блок 12 инди-. кации заносится информация о номере выбранного параметра.
Преобразование матрицы 2 производится с помощью блока 1 ключей и
матрицы 3 следующим образом.
При поступлении сигнала с i-ro компаратора на строку матрицы 3 этот сигнал возбуждает также столбцы матрицы 3, которые замкнуты на i-ю горизонтальную шину. Каждый столбец
матрицы 3 соединен с управляющим входом соответствующего ключа блока 1 ключей и при возбуждении размыкает
3
свой ключ. Таким образом, производися преобразование матрицы 2, заключающееся в том, что отключаются стобцы, соответствующие элементам, проведенным -i-м параметром.
Когда на очередном цикле моделирования все ключи блока 1 ключей отключены, то от элемента И 11 поступает сигнал на S-вход триггера 9, п которому происходит блокировка сигналов ждущего мультивибратора 8 для включения источника 4, и выдается сигнал окончания моделирования в блок 12 индикации..
Таким образом, происходит последовательный выбор строк матрицы 2, соответствующих параметрам объекта контроля, причем блок 12 индикации фиксирует совокупность параметров порядковый номер этого параметра, сответствующий стратегии контроля выранной совокупности параметров, позволяющей получить минимум целевой функции Т, представляющей собой время, необходимое для контроля объект м
Т min IlT- -Xj,
xeW
при ограничениях на взвешенную дост верность (полно.ту) контроля:
V
где х, - i-й элемент булевого вектра набора контролируемых параме тров,
1, если i-й параметр включен в совокупность контролируемых параметров до текущего шага моделирования включительно; 0, в противном случае.,
м 1, если XI а J. X j 7/ 1,
м
О, если 5 aij-X| 0. q, - априорная вероятность отказа j-ro элемента объекта контроля
V- - весомость отказа j-го элемента объекта контроля} Т,- - время контроля i-ro параметра.
В практике моделирования процессов выбора контролируемых параметров и построения стратегии контроля наи- более актуальной задачей ядляётся моделирование полного контроля,, т.е.
РА-ЛП - 1« В этом случае для V -е 1 ,N,
К; 1. Физически это означает, что необходимо выбрать такую совокупность контролируемых параметров (т.е. реализацию вектора х), которая обеспечивает полный контроль объекта контроля при минимальных затратах времени контроля.
Решение этой задачи оптимизации
производится градиентным методом путем пошагового конструирования решения при помощи функции предпочтения, которая вычисляется на каждом шаге моделирования рекуррентньм образом,
посредством преобразования матрицы 2 проводимостей.
Функция предпочтения cf на 1-м шаге имеет следующий вид:
N
0
5
0
0
5
iKD max-1.5: aYNVf. q-,
ie).M 1 J ,(e)
где a j. - элемент таблиць проверок, соответствующий матрице проводимостей, преобразованный на 1-м шаге процедуры оптимизации.
Величина q: V; моделируется проводимостью J-M столбцом матрицы 2. Величина 1/Т моделируется проводимостью i-й строки матрицы 2.
На каждом шаге процедуры для контроля выбирается параметр, имеющий максимальную величину функции предпочтения (.
Необходимо отметить, что при пере- секающихся параметрах (т.е. при наличии избыточности) предлагаемое устройство выбирает в процессе моделирования для включения в стратегию только часть параметров из исходной совокупности М параметров.
Изменяя исходные данные (величины проводимостей в вертикальных и.горизонтальных шинах матрицы проводимое- тей) и вновь решая задачу, можно получить другой состав контролируемых параметров и стратегию контроля.
Учет взаимозависимостей параметров :происходит за счет преобразования матрицы 2 ключей. В свою очередь, преобразование матрицы 2 производится с помощью матрицы 3 и ключей. На каждом шаге процесса моделирования производится выбор очередного элемента вектора параметров с помощью уже пре- 5 образованной к данному шагу матрицы, , которая учитывает результат формирования вектора решения на всех предыдущих шагах.
При возбуждении j-й вертикальной ины матрицы управления j-й ключ бло а 1 ключей запирается и обесточивает -ю вертикальную шину матрицы 2.
Жд,ущий мультивибратор 8 при по с- туплении запускающего импульса от элемента ИЛИ 7 выдает управляющий импульс на вход элемента ИЛИ 10,
Длительность управляющего импуль- Q са достаточна для полного разряда конденсаторов через разрядные резисторы тех компараторов, которые е срабртали до данного шага моделирования, т.е. тех, которые не за- g блокированы контактами соответстующих реле блока сравнения,.При поступлении сигнала Пуск триггер сбрасывается в нуль, элемент ИЛИ 10 разблокируется, и напряжение источ- Q ника питания подключается к блоку 1 ключей. При поступлении импульса от ждущего мультивибратора элемент ИЛИ 10 выдает импульс для отключения источника питания, что необходимо25
для разрядки интегрирующих конденсаторов блока компараторов.
Если, моделирование окончено,, т.е,
все ключи блока ключей срабатывают, 30 то элемент И 11 выдает сигнал на RS-триггер 9, перебрасьшая его в еди ничное состояние. Выходной сигнал триггера блокирует элемент ИЛИ 10 и выдает сигнал об окончании моделиро- 35 вания в блок индикации. Источник питания при этом отключается
Формула изобретения
Устройство для моделирования процесса выбора контролируемых параметров, содержащее ждущий мультивибратор, источник напряжения, первую комQg Q 5
0 5
0
мутационную матрицу, состоящую из М
столбцов и N строк, при этом ВЫВОД э1
i-й строки первой /коммутационной матрицы через диоды и тумблерные ключи подключены к выводам N столбцов первой коммутационной матрицы, строки которой через управляемые резисторы соединены соответственно с входами блока компараторов, отличающееся тем, что, с целью расширения области применения за счет моделирования процесса выбора взаимо- ; зависимости параметров, в него введены вторая коммутационная матрица, блок ключей, первый и второй элемен- ты ИЛИ, элемент И, RS-триггер, блок формирователей импульсов и блок индикации, информационные входы которо го объединены с входами первого элемента ИЛИ и подключены к выходам блот ка формиров ателей импульсов, входы которого объединены с выводами строк второй коммутационной матрицы и соединены с выходами блока компараторов, выводы столбцов второй коммутационной матрицы подключены к входам элемента И и управляющим входам блока ключей, выходы которого через управляемые резисторы соединены с выходами столбцов первой коммутационной матрицы, ин.формационный вход блока ключей подключен к выходу источника напряжения, вход которого соединен с выходом второго элемента ИЛИ, первый вход которого объединен с тактовым входом блока индикации и подключен к единичному выходу RS-триггера, S-вход которого соединен с выходом элемента И, второй вход элемента И подключен к выходу ждущего мультивибратора, вход которого соединен с выходом первого элемента ИЛИ, R-вход RS-триггера является пусковьм входом устройства.
| Авторское свидетельство СССР, № 752363, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЗАДАЧ | 0 |
|
SU243278A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
