00 00
Изобретение относится к моделиро- панию, а именно к физическим моделям электрических машин, и может быть использовано для исследования влияния конфигурации магнитопровода статора на выходные характеристики электрической машины с целью оптимизации геометрии магнитопровода. Модель может быть также использована в часовой промьшшенности при разработке перспективных конструкций крупногабаритных электронно-механических часов с шаговым электроприводом, в том числе реверсивным, а также элемент системы автоматического проектирования и как учебное пособие.
Целью изобретения является расширение области применения путем моделирования шаговых электродвигателей кварцевых часов.
На фиг.1 изображена физическая модель реверсивного шагового электродвигателя со сменными элементами фиксации; на фиг.2 - физическая модель шагового электродвигателя со сменными полюсами статора; на фиг.З и 4 -вариант с насьщающимися перемычками; на
Выходные параметры моделируемого двигателя - моментная характеристика, направление вращения, характер движения ротора 3 и др. зависят от конфигурации полюсов магнитопровода 4 статора, конфигурации и положения
фиг.5-7 - вариант с наконечниками;
на фиг. 8 и 9 - вариант с несимметрич-30элементов магнитопровода 9 и 10.
ным магнитопроводом.Когда оба наконечника 9 и 10 опуФизическая модель электрическойщены и размещены под углом в плоскосмашины (фиг.1) содержит корпус 1,ти вращения ротора 3 (фиг.5-7) они
плату 2, на которой размещены ротор
создают пусковой момент в направле
3 и неподвижный магнитопровод 4 ста- 35 ° часовой стрелке (фиг.6) или тора, катушку 5 возбуждения, плату 6, на которой установлены подвижные стержни 7 и 8 с укрепленными на них элементами 9 и 10 магнитопровода статора. Плата 6 прикреплена к плате 2 с помощью стоек 11. Стержни 7 и 8 с помощью втулок 12 имеют возможность фиксированной установки на различной высоте.
В другом варианте конструктивного выполнения (фиг.2) магнитопровод статора состоит из двух частей 13 и 14, каждая из которых прикреплена к соответствуняцему стержню 7 и В.
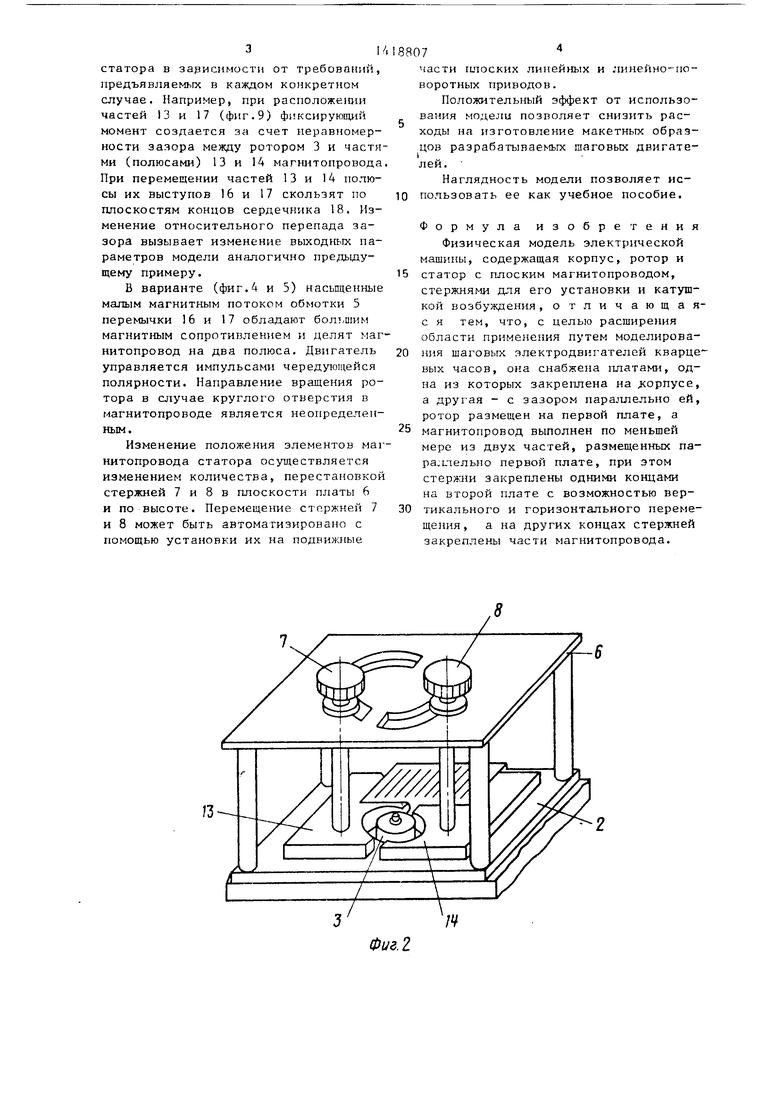
В третьем варианте (фиг.З и 4) на нижней плате 2 укреплен неподвижный магнитопровод 4 из магнитомягкого материала и сердечник 15 из магнитного материала с обмоткой 5 управления. Магнитопровод 4 и сердечник 15 соединены плоскостями их концов, образуя замкнутую магнитную цепь. Магнитопровод 4 содержит две насыщающиеся перемычки 16 и 17 и кругпротив (фиг.7).
Усилие, удерживающее ротор 3 в положении, определяемым наконечника
40 ми 9 и 10, характеризуется фиксирую щим моментом. Уменьшение размеров или удаления наконечников 9 и 10 от ротора 3 вызывает снижение напряжения пуска модели шагового двигателя
45 и его энергопотребления, но одновре менно уменьшается и его нагрузочная способность. Оптимальное соотношени может быть подобрано на М9дели в за висимости от условий нагрузки реаль ного двигателя.
В варианте (фиг.2), изменяя конф гурацию и расположение частей 13 и 14 магнитопровода статора, укреплен ных на подвижных стержнях 7 и 8, мо
55 но имитировать различные формы полю сов статора, изменяя тем самым магнитное поле в зазоре двигателя и е выходные парамечры, формировать оптимальную геометрию магнитопровода
50
5
лее отверстие, в котором размещен ротор 3.
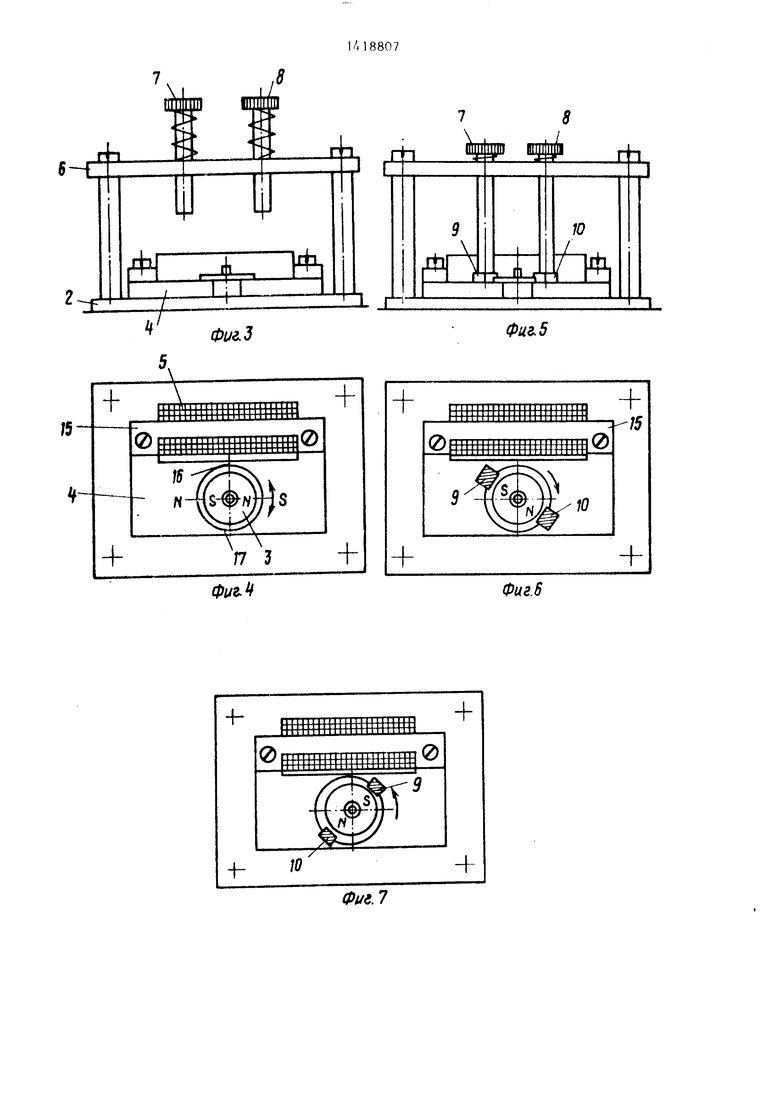
В четвертом варианте (фиг.8 и 9) с подвижные части 13 и 14 магнитопровода статора имеют выступы 16 и 17, взаимодействующие с сердечником 18. Положение частей 13 и 17 фиксируется плоскими пружинами 19 и 20.
0 Физическая модель работает следующим образом.
При подаче напряжения на катушку 5 возбуждения (фиг.1) ротор 3 поворачивается вокруг своей оси под воз5 действием магнитного поля, создаваемого в зазоре между ротором 3 и полюсами магнитопровода 4 статора. При опущенном элементе магнитопровода 9 и поднятом элементе 10 ротор 3 поворачивается в направлении против часовой стрелки, при опущенном элементе магнитопровода 10 и поднятом элементе 9 - против часовой стрелки.
Выходные параметры моделируемого двигателя - моментная характеристика, направление вращения, характер движения ротора 3 и др. зависят от конфигурации полюсов магнитопровода 4 статора, конфигурации и положения
0
создают пусковой момент в направле ° часовой стрелке (фиг.6) или
против (фиг.7).
Усилие, удерживающее ротор 3 в положении, определяемым наконечниками 9 и 10, характеризуется фиксирующим моментом. Уменьшение размеров или удаления наконечников 9 и 10 от ротора 3 вызывает снижение напряжения пуска модели шагового двигателя
и его энергопотребления, но одновременно уменьшается и его нагрузочная способность. Оптимальное соотношение может быть подобрано на М9дели в зависимости от условий нагрузки реального двигателя.
В варианте (фиг.2), изменяя конфигурацию и расположение частей 13 и 14 магнитопровода статора, укрепленных на подвижных стержнях 7 и 8, можно имитировать различные формы полюсов статора, изменяя тем самым магнитное поле в зазоре двигателя и его выходные парамечры, формировать оптимальную геометрию магнитопровода
статора в зарисимости от требований, предъявляемых в каждом комкретном случае. Например, при расположеш1и частей 13 и 17 (фиг, 9) ф1 ксирующий момент создается за счет неравномерности зазора между ротором 3 и частями (полюсами) 13 и 14 магнитопровода При перемещении частей 13 и 14 полюсы их выступов 16 и 17 скользят по плоскостям концов сердечника 18. Изменение относительного перепада зазора вызывает изменение выходных параметров модели аналогично предыдущему примеру.
В варианте (фиг.4 и 5) насыщенные малым магнитным потоком обмотки 5 перемычки 16 и 17 обладают болт,шим магнитным сопротивлением и делят маг нитопровод на два полюса. Двигатель управляется импульсами чередующейся полярности. Направление вращения ротора в случае круглого отверстия в магнитопроводе является неопределенным.
Изменение положения элементов магнитопровода статора осуществляется изменением количества, перестановкой стержней 7 и 8 в плоскости платы 6 и по высоте. Перемещение стержней 7 и 8 может быть автоматизировано с помощью установки их на подвижные
.
418807
части плоских линейных и ;шнейно-г1О- воротных приводов.
Положительный эффект от использо- вания модели позволяет снизить расходы на изготовление макетных образцов разрабатываемых шаговых двигателей.
Наглядность модели позволяет ис- 10 пользовать ее как учебное пособие.
Формула изобретения
Физическая модель электрической машины, содержащая корпус, ротор и
статор с плоским магнитопроводом, стержнями для его установки и катушкой возбуждения, отличающая- с я тем, что, с целью расширения области применения путем моделироваНИН шаговых электродвигателей кварце вых часов, она снабжена 1глатами, одна из которых закреплена на дорпусе, а другая - с зазором параллельно ей, ротор размещен на первой плате, а
магнитопровод выполнен по меньшей мере из двух частей, размещенных пара.ьтельно первой плате, при этом стержни закреплены одними концами на второй плате с возможностью вертикального и горизонтального перемещения , а на других концах стержней закреплены части магнитопровода.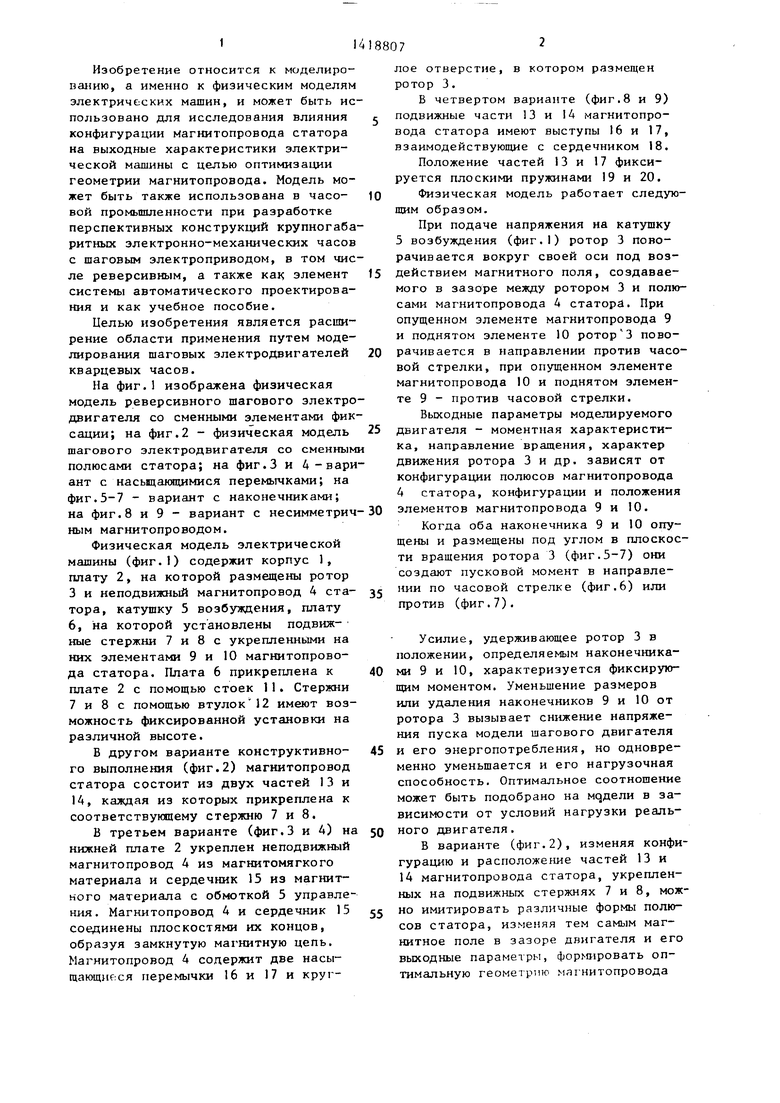
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный шаговый электродвигатель | 1991 |
|
SU1831752A3 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЧАСОВОГО ИНДИКАТОРА | 1987 |
|
RU2023280C1 |
| Универсальный шаговый электродвигатель | 1990 |
|
SU1815754A1 |
| Физическая модель электрической машины | 1983 |
|
SU1161965A1 |
| Однофазный шаговый двигатель ИР-360 | 1985 |
|
SU1718344A1 |
| Линейный вентильный электродвигатель | 2020 |
|
RU2750646C1 |
| Шаговый электродвигатель | 1979 |
|
SU845237A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ УНОСИМИГ | 1990 |
|
RU2030078C1 |
| Шаговый электродвигатель | 1979 |
|
SU845235A1 |
| "Шаговый электродвигатель "Румфон - 2 @ " | 1988 |
|
SU1785066A1 |
Изобретение относится к моделированию, а именно к физическим моделям электрических машин, и может быть использовано для исследования конфигурации магнитопровода статора на выходные характеристики электрической машины с целью оптимизации геометрии магнитопровода. Модель может быть также использована в часовой промьгашенности при разработке перспективных конструкций часов с шаговым электроприводом, а также как элемент системы автоматического проектирования и как учебное пособие. Целью изобретения является расширение области применения путем моделирования шаговых электродвигателей кварцевых часов. Модель содержит корпус 1, плату 2, на которой размещены ротор 3, неподвижный магнитопровод 4 статора, катушку возбуждения 5, плату 6, на которой устанавливаются подвижные стержни 7 и 8 с укрепленными на них элементами 9 и 10 магнитопровода статора. 9 ил. i сл
фиг.
-Ь
/О
Фиг. 7
Фиг. 5
Фиг.6
ФиА.8
Фиг.9
| Физическая модель электрической машины | 1983 |
|
SU1161965A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
