(54) ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ

| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1980 |
|
SU868941A1 |
| Шаговый электродвигатель | 1983 |
|
SU1140208A1 |
| Шаговый электродвигатель | 1979 |
|
SU904140A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЧАСОВОГО ИНДИКАТОРА | 1987 |
|
RU2023280C1 |
| ШАГОВЫЙ ДВИГАТЕЛЬ | 2009 |
|
RU2422973C1 |
| Шаговый электродвигатель | 1987 |
|
SU1713040A1 |
| ОДНОФАЗНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1988 |
|
RU2030068C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ УНОСИМИГ | 1990 |
|
RU2030078C1 |
| ЧАСОВОЙ СЕМИСЕГМЕНТНЫЙ ИНДИКАТОР | 1988 |
|
RU2050573C1 |
| Шаговый электродвигатель | 1978 |
|
SU782073A1 |
I
Изобретение относится к электротехнике, в частности к электрическим шаговым двигателям, которые находят широкое применение в системах автоматики и в дискретном электроприводе.
Известны шаговые электродвигатели, состоящие из статора, который имеет постоянные магниты, зубчатые сердечники и обмотку управления, и зубчатого ротора 1. Такие двигатели сложны в конструктивном и технологическом отношении.
Наиболее близким по своей технической сушности к изобретению является шаговый электродвигатель, состоящий из статора, имеющего магнитопроводящий стержень с полюсными н-аконечниками, на котором размещена двухсекционная обмотка управления, постоянные магниты, намагниченные параллельно оси двигателя и снабженные своими наконечниками, и ротора с явновыраженными полюсами, установленного на одном конце вала с аксиальным смещением относительно стержня 2. Однако функциональные возможности этого двигателя ограничены ввиду того, что величину шага ротора этого двигателя нельзя изменять.
не изменяя конструктивных параметров двигателя;
Цель изобретения - расширение функциональной, возможности двигателя за счет изменения величины щага и реверсирования - движения вала.
Достижается это тем, что в описьшаемом двигателе полюсный наконечник постоянных магнитов выполнен кольцевым с равномерно расположенными на внутреннем диаметре пазами; постоянные магниты установлены
10 на полюсных наконечниках магнитопроводящего стержня, а ротор выполнен плоским, установлен- с радиальным зазором относительно полюсного наконечника постоянных магнитов и снабжен по внешнему диаметру полюсов симметрично распо 5 ложенными пазами, причем на другом конце вала размещен дополнительный кольцевой постоянный магнит, намагниченный с чередующейся по окружности полярностью полюсов.
20
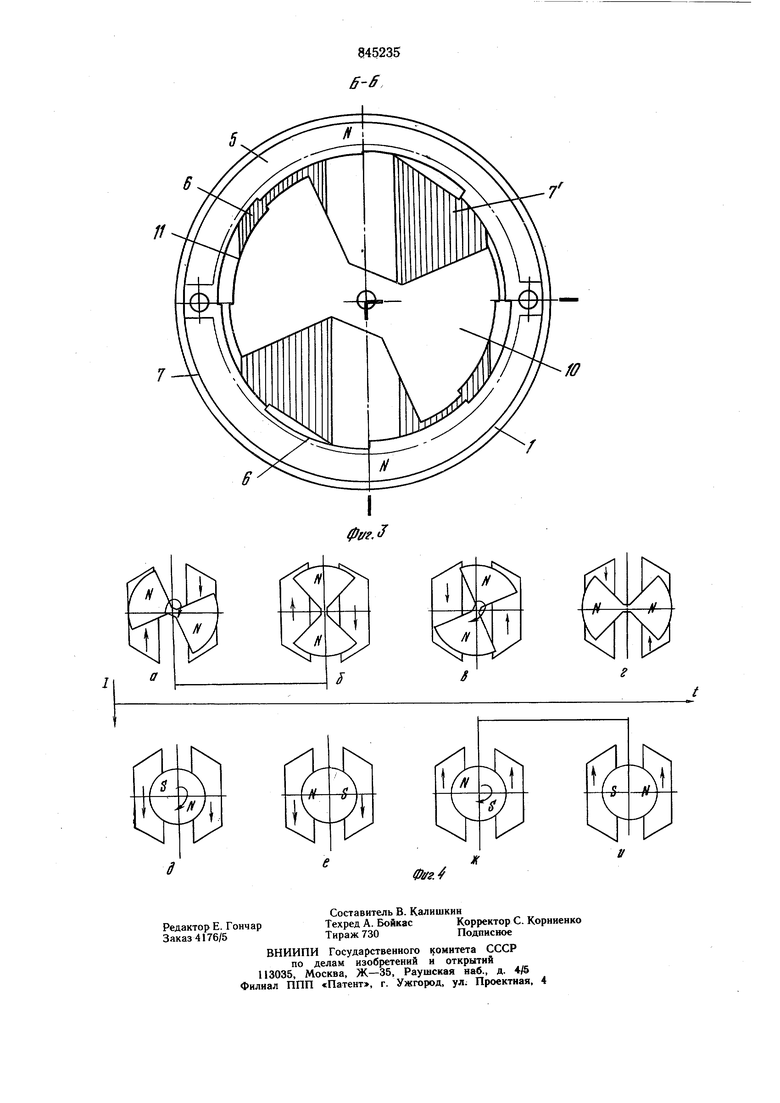
Для повышения энергетических показателей описываемый двигатель снабжен дополнительными дисковыми магнитопроводами, размещенными внутри обмотки управления, установленными соосно с валом ротора, один из которых, расположенный между ротором и стержнем, плотно прилегает к стержню, а другой, расположенный с противоположной стороны стержня, установлен с магнитно изолирующим промежутком относительно последнего. На фиг.. 1 приведен поперечный разрез описываемого двигателя; на фиг. 2 - продольный разрез д вигателя; на фиг. 3 - вид сверху; на фит. 4 (а, б, в, г, д, е, ж, и) схематично представлены взаимные расположения ротора и статора на различных этапах отработки ротором шага и действующие моменты с учетом направления.тока в секциях обмотки. Предлагаемый двигатель имеет корпус 1, в котором установлен магнитопроводящий стержень 2 с наконечниками 3 и постоянные магниты 4 с полюсным наконечником 5, имеющим пазы 6. На стержне 2 размещены две секции обмотки управления 7 и , а в центре его имеется отверстие, через которое проходит вал 8, установленный на подшипниках 9. На одном конце вала 8 закреплен ротор 10, на явновыраженных полюсах которого имеются симметричные пазы 11. На втором конце вала 8 закреплен дополнительный постоянный магнит 12, намагниченный, как показано на фиг. 2 и 4. Для повышения надежности двигателя секции обмотки управления 7 и намотаны на каркасе, выполненном из двух частей 13 и 14. Энергетические показатели двигателя могут быть улучшены путем установки дополнительных магнитно проводящих дисков 15 и 16. Двигатель работает, следующим обра зом. При обесточенной обмотке, благодаря магнитному потоку постоянных магнитов и наличию пазов 6 и 11 ротор двигателя под действием реактивного момента будет занимать исходное положение, как показано на фиг. 4а. Подача тока в обмотки с направлением, как указано на этой же фигуре, и полярности постоянных магнитов 4 приводит к возникновению активного момента в направлении стрелки от взаимодействия потока постоянных магнитов и проводников с током. В этих условиях момент от взаимодействия постоянного магнита 12 с проводниками противоположных сторон секций 7 и 7 будет равен нулю. Таким образом, за время прохождения положительного имп-ульса ротор займет положение, указанное на фиг. 4 б, с котором активный момент равен нулю. В промежутке между импульсами ротор 10 повернется по часовой стрелке под действием реактивного момента до положения, указанного на фиг. 4 в, завершив, таким образом,, шаг. Прохождение в этих же условиях импульса противоположной полярности создает активный момент, который повернет ротор до положения, указанного на фиг. 4 г, а затем до подачи нового положительного импульса тока ротор 10 повернется до угла 180° и завершит второй шаг, после чего процесс будет повторяться. Изменение взаимного направления тока в секциях 7 и 7 обмотки изменяет физическую картину - в силу симметрии ротора при одинаковом направлении тока в секциях 7 и 7 обмотки, активными момент, действующий на ротор 10 во всех его положениях будет равен нулю, а при отсутствии тока в обмотках на ротор 10 будет действовать реактивный момент. Активный момент будет возникать при наличии тока в секциях 7 и 7 от взаимодействия его с потоком постоянного магнита 12, при этом за время прохождения положительного импульса магнит 12, а следовательно, и вал 8 двигателя повернется почти на 180°, т.е. до положения указанного на фиг. 4 е. В промежутке между импульсами магнит 12 завершит полоборота (см. фиг. 4 ж). При подаче отрицательного импульса ротор будет двигаться в прежнем направлении до положения, указанного на фиг. 4 и, а полный оборот завершится в следующем промежутке между импульсами под действием реактивного момента. При расположении оси полюсов кольцевого магнита параллельно оси полюсов ротора изменение дискретности шага не изменяет направления вращения вала. Установка полюсов кольцевого магнита с взаимным разворотом друг относительно друга на угол, соответствующий половине меньщего шага, приводит к реверсированию вращения вала двигателя при изменении дискретности шага. Таким образом, при встречном направлении токов в секциях 7 и 7 обмотки управления прохождение двух разнополярных импульсов обеспечивает поворот вала на 180°, а при одинаковом - на 360°, т.е. описы ваемый двигатель в зависимости от схемы включения обмоток обеспечивает разную дискретность шага, что существенно расширяет его функциональные возможности. Установка магнитно проводящих дисков 15 и 16 приводит к повышению энергетических показателей двигателя, так как позволяет увеличить магнитный поток в рабочих зазорах, что дополнительно улучшает свойства настоящего шагового электродвигателя. Формула изобретения 1. Шаговый электродвигатель, состоящий из статора, имеющего магнитопроводящий стержень с полюсными наконечниками, на котором размещена двухсекционная обмотка управления, постоянные магниты, намагниченные параллельно оси двигателя и снабженные своими наконечниками, и ротора с явновыраженными полюсами, установленного на одном конце вала с аксиальным смещением относительно стержня, отличающийся тем, что, с целью расширения функциональных возможностей двигателя за счет изменения функцийнальных возможностей изменения величины шага в реверсирования движения вала, полюсный наконечник постоянных магнитов выполнен- кольцевым с равномерно расположенными на внутреннем диаметре пазами; постоянные магниты установлены на полюсных наконечниках магнитопроводящего стержня, а ротор выполнен плоским, установлен с радиальным зазором относительно полюбного наконечника постоянных магнитов и снабжен по внешнему диаметру полюсов симметрично расположенными пазами, причем на другом конце вала размещен дополнительный кольцевой постоянный магнит с чередующейся по окружности полярностью полюсов.
f
/
уг. /
2 // /
/ ./ / / 2. Электродвигатель по п. 1, отличающийся тем, что он снабжен дополнительными дисковыми магнитопроводами, размещенными внутри обмотки управления, установленными соосно с валом ротора, один из которых, расположенный между ротором и стержнем, прилегает к стержню, а другой, расположенный с противоположной стороны стержня, установлен с магнитноизолирующим промежутком относительно последнего. Источники информации, принятые во внимание при экспертизе 1.Дискретный электропривод с щаговыми двигателями, под общей ред. М. Г. Чили-, кина. - М., Энергия, 1971, рис. 5-16, с. 195. 2.Авторское свидетельство СССР № 544063, кл. Н 02 К 37/00, 1977 (прототип).
