1 1420604
Изобретение относится к аналоговым вычислительным устройствам для решения задач математической физики и может быть использовано для решения задач теории переноса, описываемых интегродифференциальными уравнениями.
Цель изобретения - расширение класса решаемых задач, описываемых интег-
10
родифференциапьными уравнениями.
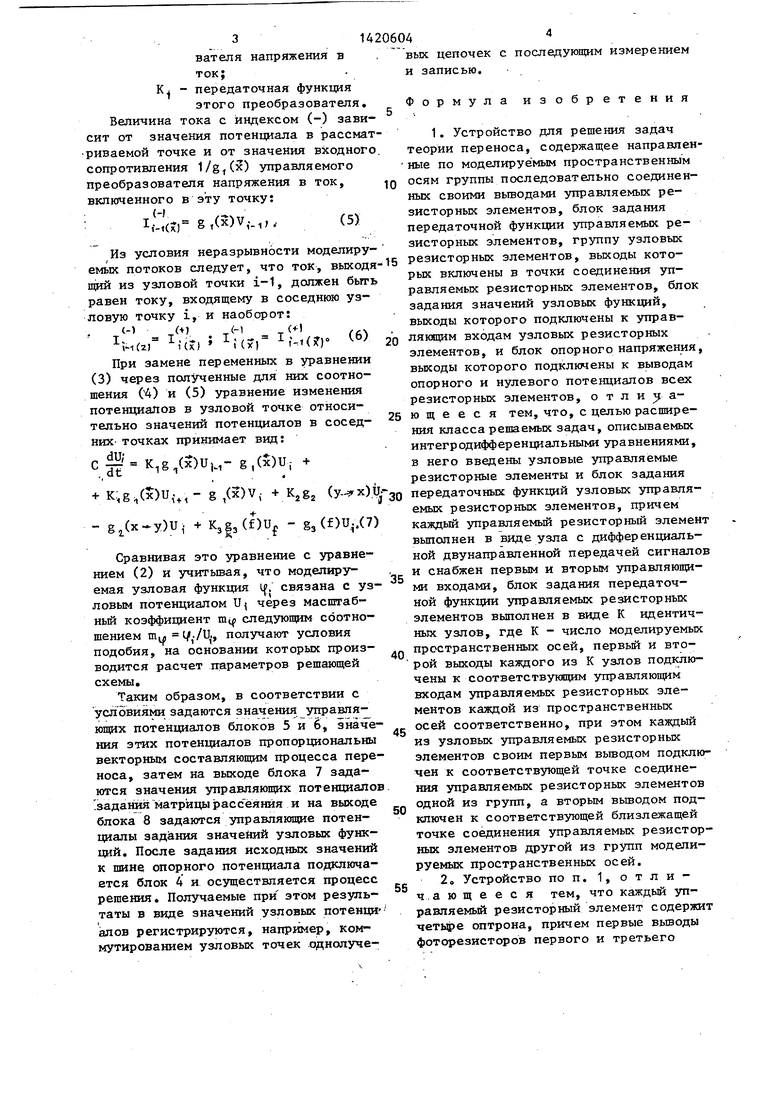
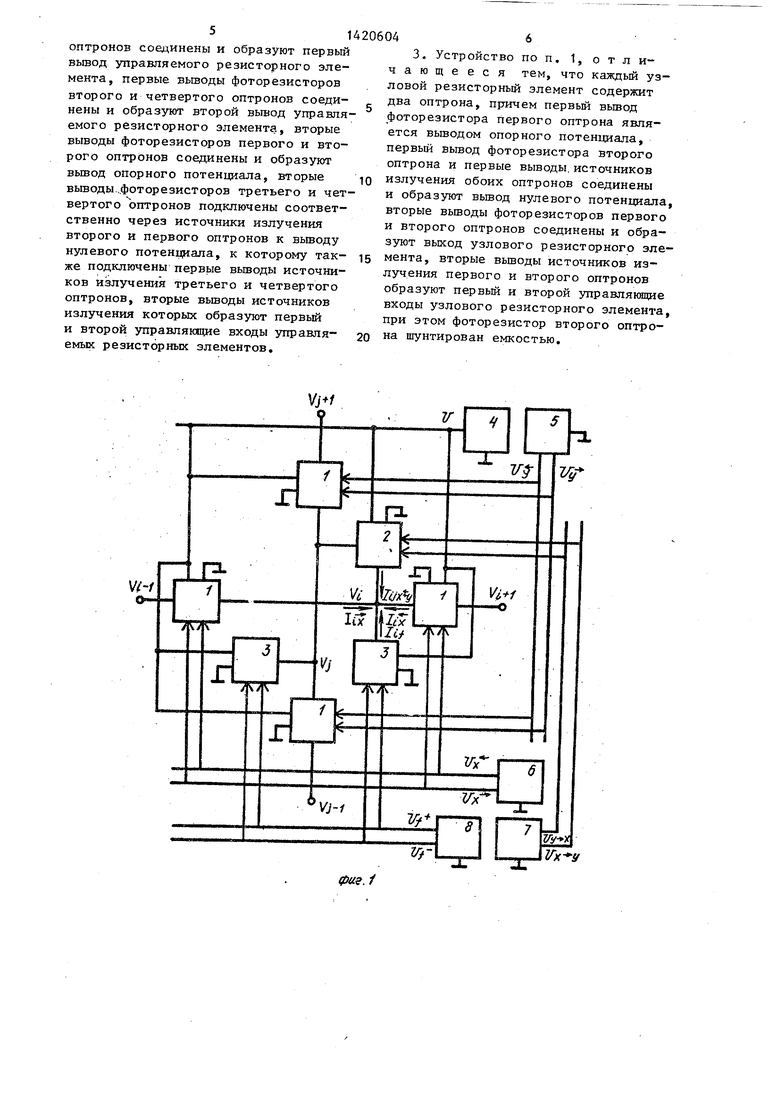
На фиг. 1 представлен фрагмент структурной схемы устройства, представляющий собой узловую точку для двухлучевой модели переноса с двумя перпендикулярно пересекающимися луча- с ми; на фиг. 2 - вариант выполнения управляемых резисторных элементов; на фиг. 3 - вариант вьтолнения узловых резисторных элементов.
Устройство содержит направленные по моделируемым осям группы последовательно соединенных своими выводами управляемых резисторных элементов 1
p f/;fi ; - единичный вектор направления полета час- ,тиц ( Кх °5 -i) , а iy - орт вдоль оси ох); f(x, p,t) - функция заданных источников излучения, функции d) (х) и д(к) предполагаются кусоч- но-непрерьшными
20
О , оо, OicTj J s oc, ,
c..- sПрименяя к пространственным переменным конечно-разностную аппроксимацию, преобразуют уравнение (1) и тогда в однолучевой модели с направ- лением полета частиц вдоль оси ОХ уравнение распределения узловых функций 1. будет:
.ifr
V dt 4х. .
(2) и включенных между пересекающимися уз- где ( jj )%,- интегральная функция
лами узловых управляемых резисторных 25 дифференциального рассеяния частиц элементов 2, подключенных к точкам из орта iy, направленного по оси СУ, соединения управляемых резисторных в орт i, направленньй по оси ОХ. элементов.узловьк резисторных элемен- Уравнение, описывающее изменение тов 3, а также блок 4. опорного напря- узлового потенциала U- в узловой точ30 ке цепочки одноузловой модели, направленной по оси ОХ, имеет в соответствии
жения и блоки задания передаточной функции управляемых резисторных элементов по осям У 5 и X 6, блок 7 задания передаточных функций узловых Управляемых резисторных элементов, блок 8 задания значений узловых функций. Каждый уЛравляемьй резисторньй элемент содержит, например четbipe опт- рона 1.1-1.4, а узловой резисторный элемент содержит два оптрона 3.1-3.2 и конденсатор 3.3. При этом блоки 6-8 задания значений имеют два вывода для задания значений противоположно направленных векторных величин.
Устройство работает следующим обс обозначениями на фиг. 1 .следующий
ВИД
Лт.
(3)
35
dt ) ij()
40
где значения токов I.,jf I-, /
() (+J (-1 1,,, I i(t| i(x) соответствуют значе1шям противоположно направленных потоков частиц, а значения токов If/jj,y,
,
Х1 V- у
и(хгк)
- I
( 1(УУ Ii() (
™ Т
l(t|
соответствуют значениям функций дифференциального рассеяния из орта iu,
разом. Р Х значениям узловых функций
В соответствии с условиями решаемой 45 источников и стоков. Токи с индексом задачи задаются параметры элементов () направлены к рассматриваемой уз- решающего устройства. Это задание про- ловой точке и соответствуют источнй- водится на основании условий подобия, кам, а с индексом (-) направлены в которые получены следующим образом. обратную сторону и соответствуют поУравнение теории переноса в плоско-50 глощению и рассеянию. Величина тока параллельной геометрии имеет вид
с индексом (+) зависит от значения потенциала в соседней узловой точке, с которой через управляемьй резисторный элемент соединена рассматриваемая точка, например: .(-)
di/ , + fx-
dx - 1 J dpь f, (1)
i(x, ) - плотность частиц в „
точке X, летящих со скоростью V под углом V к оси ОХ в момент времени t;
p f/;fi ; - единичный вектор направления полета час- ,тиц ( Кх °5 -i) , а iy - орт вдоль оси ох); f(x, p,t) - функция заданных источников излучения, функции d) (х) и д(к) предполагаются кусоч- но-непрерьшными
с
0
О , оо, OicTj J s oc, ,
c..- sПрименяя к пространственным переменным конечно-разностную аппроксимацию, преобразуют уравнение (1) и тогда в однолучевой модели с направ- лением полета частиц вдоль оси ОХ уравнение распределения узловых функций 1. будет:
.ifr
V dt 4х. .
(2) где ( jj )%,- интегральная функция
с обозначениями на фиг. 1 .следующий
ВИД
Лт.
(3)
5
dt ) ij()
0
где значения токов I.,jf I-, /
() (+J (-1 1,,, I i(t| i(x) соответствуют значе1шям противоположно направленных потоков частиц, а значения токов If/jj,y,
,
Х1 V- у
и(хгк)
- I
( 1(УУ Ii() (
™ Т
l(t|
соответствуют значениям функций дифференциального рассеяния из орта iu,
глощению и рассеянию. Величина тока
с индексом (+) зависит от значения потенциала в соседней узловой точке, с которой через управляемьй резисторный элемент соединена рассматриваемая точка, например: .(-)
.Ii(r)K,g,(5)U,.,,(4).
где 1/gi(5t) - входное сопротивление
управляемого преобразсвателя напряжения в ток; К - передаточная функция
этого преобразователя. Величина тока с индексом (-) зависит от значения потенциала в рассматриваемой точке и от значения входного сопротивления 1/g,(x) управляемого преобразователя напряжения в ток, включенного в эту точку;
1ма) §т(х)У,..1,, (5)
Из условия неразрывности моделиру- емых потоков следует, что ток, выходя щий из узловой точки i-1, должен быть равен току, входящему в соседнюю узловую точку i, и наоборот: (я (- (1
I.;., ; 1;., If,(jJ,c
С-) 5м(2,
i(x)
(6)
При замене переменных в уравнении (3) через полученные для них соотношения С4) и (5) уравнение изменения потенциалов в узловой точке относительно значений потенциалов в соседних- точках принимает вид:
,g(x)U,,-g,(x)U,- -ь
.
+ К:,в,()и.,- g,(x)Vi ч- K,g, (y-).U - g(x-y)U. + Kj|3(f)U - g3(f)U,..(7)
Сравнивая это уравнение с уравнением (2) и учитьшая, что моделируемая узловая функция 1. связана с узловым потенциалом U через масштаб- ньш коэффициент тц; следующим соотношением т,д t/,./lJ-, получают условия подобия, на основании которых производится расчет параметров решающей схемы.
Таким образом, в соответствии с условиями задаются значения управляющих потенциалов блоков 5 и 6, значения этих потеН1щалов пропорциональны векторным составляющим процесса переноса, затем на выходе блока 7 задаются значения управляющих потенциалов задания матрицы расс ёяния и на выходе блока 8 задаются управляющие потенциалы задания значений узловых функций. После задания исходных значений к шине опорного потенциала подключается блок 4 и осуществляется процесс решения. Получаемые при этом результаты в виде значений узловых потенци апоз регистрируются, например, коммутированием узловых точек однолуче
, Q
20
25
f30
40
45
50
вых цепочек с последующим измерением и записью.
Формула изобретения
1, Устройство для решения задач теории переноса, содержащее направлен- ные по моделируемым пространственным осям группы последовательно соединенных своими выводами управляемых ре- зисторных элементов, блок задания передаточной функции управляемых ре- зисторных элементов, группу узловых резисторных элементов, выходы которых включены в точки соединения управляемых резисторных элементов, блок задания значений узловых функций, выходы которого подключены к управляющим входам узловых резисторных элементов, и блок опорного напряжения, выходы которого подключены к выводам опорного и нулевого потенциалов всех резисторных элементов, о т л и jj а- ю щ е е с я тем, что, с целью расширения класса решаемых задач, описываемых интегродифференциальнымн уравнениями, в него введены узловые управляемые резисторные элементы и блок задания передаточных функций узловых управляемых резисторных элементов, причем каждый управляемьй резисторный элемент выполнен в виде узла с дифференциальной двунаправленной передачей сигналов и снабжен первым и вторым управляющ - ми входами, блок задания передаточной функции управляемых резисторных элементов выполнен в виде К идентичных узлов, где К - число моделируемых пространственных осей, первьй и второй выходы каждого из К узлов подключены к соответствуюпщм управляющим входам управляемых резисторных элементов каждой из пространственных осей соответственно, при этом каждый из узловых управляемых резисторных элементов своим первым вьшодом подключен к соответствующей точке соединения управляемых резисторных элементов одной из групп, а вторым вьшодом подключен к соответствующей близлежащей точке соединения управляемых резисторных элементов другой из групп моделируемых пространственных осей.
2, Устройство по п. 1, отли- ч.а ю щ е е с я тем, что каждый уп- равляемьй резисторный элемент содержит четыре оптрона, причем первые вьшоды фоторезисторов первого и третьего
оптронов соединены и образуют первый вьгоод управляемого резисторного элемента, первые вьшоды фоторезисторов второго и четвертого оптронов соединены и образуют второй вывод управляемого резисторного элемента, вторые выводы фоторезисторов первого и второго оптронов соединены и образуют вьтод опорного потенциала, вторые
вьтоды.,.фоторезисторов третьего и четвертого Ъптронов подключены соответственно через источники излучения второго и первого оптронов к вьгооду нулевого потенциала, к которому так- же подключены первые вьтоды источников излучения третьего и четвертого оптронов, вторые вьшоды источников излучения которых образуют первый и второй управляющие входы управля- емък резисторных элементов.
3. Устройство по п. 1, отличающееся тем, что каждьй узловой резисторный элемент содержит два оптрона, причем первьм вьшод фоторезистора Первого оптрона является вьшодом опорного потенциала, первый вывод фоторезистора второго оптрона и первые выводы, источников излучения обоих оптронов соединены и образуют вьшод нулевого потенциала, вторые вьшоды фоторезисторов первого и второго оптронов соединены и образуют выход узлового резисторного элемента, вторые вьшоды источников излучения первого и второго оптронов образуют первый и второй управляющие входы узлового резисторного элемента, при этом фоторезистор второго оптро- на шунтирован емкостью.
фи.3.2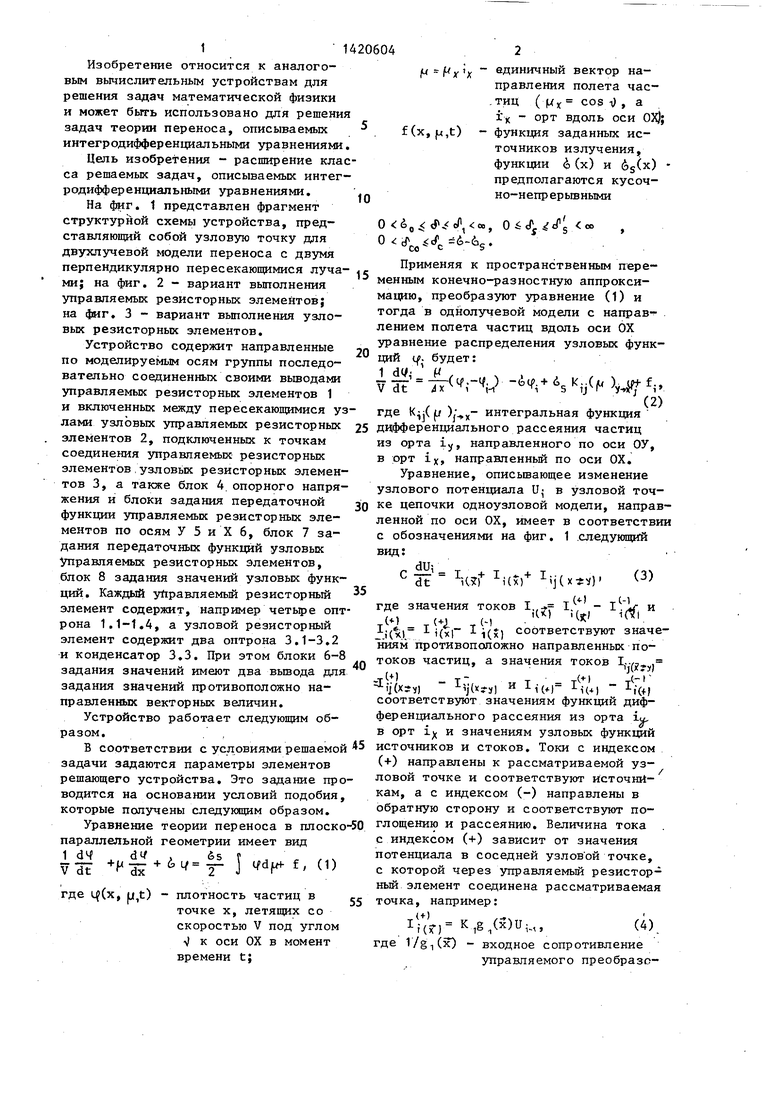
Изобретение относится к аналоговым вычислительным устройствам для решения задач математической физики и может быть использовано для решения задач теории переноса, описьшаемьк интегродифференциальНыми уравнениями. Цель изобретения - расширение класса решаемых задач. С этой целью в сеточную оптронную модель введены узловые управляемые резисторные элементы и 6jloK задания передаточных функций этих элементов. Сами элементы выполнены в виде оптронных узлов с дифференциальной двунаправленной передачей сигналов и подключены в местах пересечений цепочек сеточной модели между разными моделируемыми пространственными осями, узловые соединения между которыми изолированы. 2 з.п. ф-лы, 3 ил.
У
физ.З
| УСТРОЙСТВО для РЕШЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХУРАВНЕНИЙ | 0 |
|
SU287416A1 |
