ю
яетл
СП
ОС
ь.1
Изобретение относится к транспортному мащиностроению, в частности к устройствам .регулирования силы тяги тепловозов с дизельным двигателем и гидравлической передачей.
Цель изобретения - повьшение точности.
На чертеже представлена блок-схема устройства для управления автономным транспортньм средством.
Устройство состоит из регулятора 1 частоты вращения коленчатого вала дизельного двигателя 2, вход которого Соединен с выходом интегратора 3, Командоаппарата 4, к одному из выхо- дов которого подключены управляющие . Вентили 5 гидравлической передачи 6, :кинематически св язанной с дизельным :двигателем 2, а к другому - одни из ;входов интегратора 3 и ключевого ; элемента 7, другой вход которого со- единен с въгходом блока 8 сравнения, а выходы - с входами блока 9 памяти и ч функционального преобразователя 10, к выходу которого подключен другой вход интегратора 3, причем входы блока 8 сравнения соответственно соединены с выходами блока 9 памяти, датчика 11 скорости транспортного средства и датчика I2 частоты вращения . коленчатого вала дизельного двиглте- ля. Блок 9 памяти выполнен на операционном усилителе 13, между входом и выходом которого включен конденсатор 14, причем к входу операционного усилителя подключен один из выводов .резистора 15, другой вывод которого и выход операционного усилителя 13 являются соответственно входом и выходом блока 9 памяти..Ключевой элемент 7 представляет собой реле с двумя блокировочными контактами. Интегратор 3 - реверсивный электродвигатель а функциональный преобразователь - транзисторный усилитель.
Устройство для управления автономным транспортным средством работает следующим образом.
В исходном состоянии транспортное средство неподвижно, дизельный двигатель 2 работает на холостом ходу, а сигналы управления на выходах коман- доаппарата 4 отсутствуют. При этом ключевой элемент 7 соединяет выход блока В сравнения с входом функцио-. нального преобразователя 10, блок 9 памяти работает в режиме хранения, так как его вход разомкнут.
0
5
0
5
0
5
0
5
0
5
При необходимости трогания транс- портного средства оператор воздействует на командоаппарат 4 и сигнал управления поступает к управляющим вентилям 5 гидравлической передачи 6. Срабатывание вентилей 5 вызывает заполнение гидроаппаратов гидравлической передачи 6 маслом. При этом неподвижное еще транспортное средство развивает тяговое усилие, соответствующее исходной частоте вращения ко- ленчатого вала дизельного двигателя 2, который воспринимает нагрузку благодаря увеличению подачи топлива, вызванному действием регулятора 1 частоты вращения коленчатого вала дизельного двигателя.
При необходимости изменения силы тяги транспортного средства оператор через командоаппарат 4 подает сигнал управления на интегратор 3 и ключевой элемент 7, котЪрый размыкает вход функционального преобразователя 10 и соединяет выход блока 8 сравнения с входом блока 9 памяти, который переводится в режим интегрирования. Поступление сигнала управления с другого выхода Командоаппарата 4 на вход интегратора 3 вызьтает изменение с определейным темпом затяжки всережим- ной пружины регулятора 1 частоты вращения коленчатого вала дизельного двигателя 2. Регулятор 1, воздействуя на топливоподачу дизельного двигателя 2, изменяет частоту вращения его коленчатого вала, а следовательно, и силу тяги транспортного средства. Изменение частоты вращения коленчатого вала дизельного двигателя 2 отображается соответствующим изменением выходного сигнала датчика 12 частоты вращения коленчатого вала.
При этом на выходе блока 8 сравнения появляется сигнал рассогласования, .воздействующий через ключевой элемент 7 на вход блока 9 памяти. Изменение выходного сигнала блока 9.происходит до тех пор, пока сигнал рассогласования на выходе блока 8 сравнения не станет равным нулю. По достижении необходимого значения силы тяги транспортного средства оператор прекращает воздействие на командоаппарат 4. При этом интегратор 3 прекращает изменение затяжки всережимной пружины регулятора 1, а ключевой элемент 7 размыкает вход блока 9 памяти, переводя его в режим хранения, и сое3 - 14
диняет выход блока 8 сравнения с входом функциональнбго преобразователя 10.
При увеличения скорости движения транспортного средства частота вращения коленчатого вала и мощность дизельного двигателя 2 в первоначальный момент времени не изменяются, а сила тяги транспортного средства уменьшается. Однако увеличение скорости транспортного средства отображается соответствующим увеличением выходного сигнала датчика 11, поступающего на вход блока 8 сравнения. При этом на выходе блока 8 сравнения появляется сигнал рассогласования, воздействующий через ключевой элемент 7 и функциональный преобразователь 10 на вход интегратора 3. Интегратор 3 увеличивает затяжку всережимной пружины регулятора 1, который,воздействуя на топливоподачу дизельного двигателя 2, разгоняет его до тех пор, пока увели - чение выходного сигнала датчика 12 частоты вращения не скомпе.нсирует увеличение сигнала датчика 11 скорости транспортного средства, т.е. пока вы- /ходной сигнал блока В сравнения не станет равным нулю. При этом мощность дизельного двигателя 2 возрастает, а величина силы тяги транспортного средства достигает величины, имеющей место до увеличения скорости движения транспортного средства. При уменьшении скорости движения транспортного средства действие предлагаемого устройства аналогично.
При необходимости изменения силы тяги движущегося транспортного сред-г
582
ства действие устройства аналогично . действию, описанному для неподвижного транспортного средства.
Формула изобретения
Устройство для управления автономным транспортным средством с гидравлической передачей, Содержащее регулятор частоты вращения коленчатого вала дизельного двигателя, командоап- парат, к одному из выходов которого подключен управляющий вход гидравлической передачи, кинематически связанной с дизельным двигателем, и датчик скорости транспортного средства, отличающееся тем, что, с целью повышения точности, оно снабжено блоками памяти и сравнения, ключевь1м элементом, подключенным выходом
к входу регулятора частоты вращения
коленчатого вала дизельного двигателя, интегратором, функциональным преобразователем и датчиком частоты вращения коленчатого вала дизельного двигателя, выход которого соединен с од- ним из входов блока сравнения, подключенного другими входами к выходам
датчика скорости транспортного средства и блока памяти, а выходом - к одному из входов ключевого элемента, другой вход которого соединен с другим выходом командоаппарата, а выходы - с входами блока памяти и функционального преобразователя, подключенного выходом к одному из входов интегратора, другой вход которого соединен с другим выходом командоаппарата.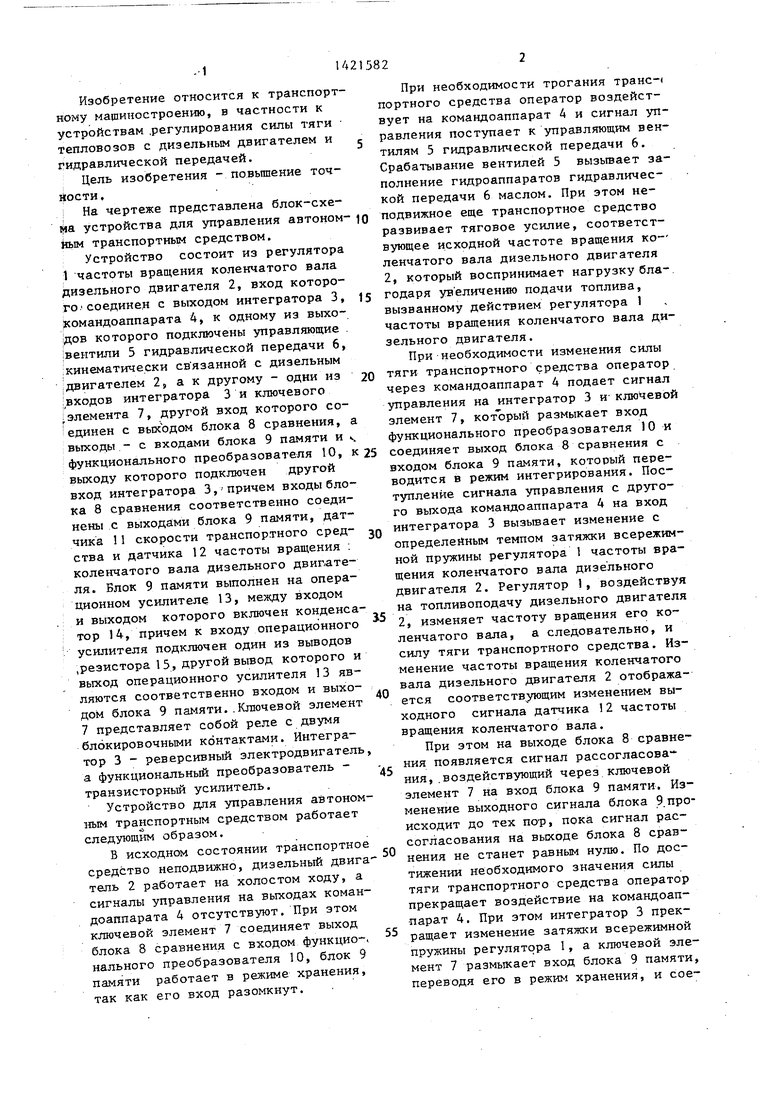

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости тепловоза с гидравлической передачей | 1987 |
|
SU1426877A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1986 |
|
SU1463546A1 |
| Система автоматического управления режимами работы двигателя транспортного средства | 1990 |
|
SU1754506A1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ СИЛОВЫХ УСТАНОВОК И ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2308767C1 |
| Система электронного управления подачей топлива дизельного двигателя локомотива | 2021 |
|
RU2773297C1 |
| ДИЗЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1989 |
|
RU2037635C1 |
| Устройство для автоматического управления дизель-генераторной установкой тепловоза | 1988 |
|
SU1564017A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА К ДИЗЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2011552C1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| Устройство для измерения мощности цилиндров двигателя внутреннего сгорания | 1983 |
|
SU1183846A1 |
Изобретение относится к транспортному машиностроению и предназначено преимущественно для регулирования силы тяги : «тепловозов с гидравли- ческой передачей. Цель изобретения повышение точности. Устройство для управления автономным транспортным средством содержит регулятор 1 частоты вращения коленчатого вала дизельного двигателя 2, вход которого соединен с выходом интегратора 3, комая- доаппарат 4, к одному из входов которого подключены управляющие вентили 5 гидравлической пер едачи 6, к другому. - одни из входов интегратора 3 и ключевого элемента 7, другой вход которого соединен с выходом блока В сравнения, а выход - с входами блока 9 памяти и функционального преобразователя 10, к выходу которого подключен другой вход интегратора 3, причем входы блока 8 сравнения соотйет- ственно соединены с выходами блока 9 памяти и датчиков 11 скорости транспортного средства и частоты вращения коленчатого вала дизельного- двигателя . 1 ил. 4 сл
| Устройство для управления силовой установкой дизель-поезда | 1982 |
|
SU1079507A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
